具有惯性负载估计补偿的电动静液作动器自适应控制方法
- 国知局
- 2024-08-01 00:06:26
本发明涉及了一种自适应控制方法,具体涉及一种具有惯性负载估计补偿的电动静液作动器自适应控制方法。
背景技术:
1、电动静液作动器(electro-hydrostatic actuator,eha)是集泵阀缸和驱控系统于一体的高度集成化的电驱-液传-电控系统,相比于传统的阀控液压系统,既保留了液压传动在重载作业和功率密度等方面的优势,又能解决庞大液压源、复杂管路等痛点,已广泛应用在飞行器、航空等领域,在机械加工领域以及海洋领域也逐渐开始应用。
2、在实际应用场景中,eha在具体的作业过程中会不断承受着外部未知负载的影响,而当这些变化的惯性负载会影响系统的动力学,从而恶化系统的控制性能。因此,如若能够在每次施加惯性负载时,准确的测量/估计出负载的重量,并更新进系统的动力学模型,将会一定程度上提升系统的作业精度和任务适应能力,且明确的负载重量测量/估计结果也可以被应用到其他需要负载质量的任务过程之中。然而,实际中力传感器等普遍价格昂贵,且在一些复杂的场景和任务下,在末端执行器安装相应的传感器也十分困难。因此,在存在未知负载的情况下,设计实现负载的精确估计的控制器,将会提升系统带载作业的控制精度。
技术实现思路
1、为了解决背景技术中存在的问题,本发明所提供一种具有惯性负载估计补偿的电动静液作动器自适应控制方法。方法用以解决在带载作业中未知惯性负载对系统动力学和控制性能的影响;方法针对eha存在的系统高阶非线性模型,采用了反步法控制策略,并在第一步中建立自适应律来实现惯性负载的精确在线估计,并进行实时的负载动力学补偿,从而提升eha的作业控制性能。
2、本发明采用的技术方案是:
3、本发明的具有惯性负载估计补偿的电动静液作动器自适应控制方法,包括:
4、1)使用牛顿-欧拉方程和流量连续方程等建模方法建立包含外部惯性负载的电动静液作动器的系统非线性动力学模型。
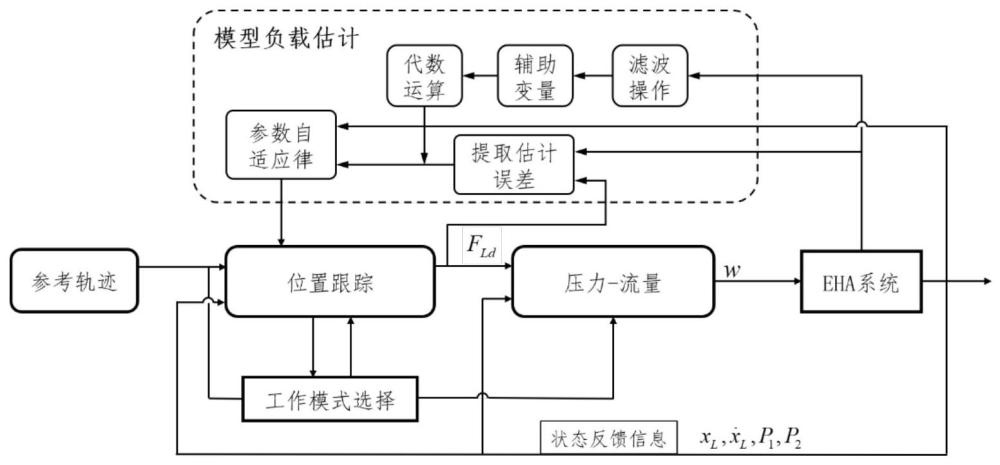
5、2)基于电动静液作动器的系统非线性动力学模型,使用反步控制法设计自适应反步控制器;自适应反步控制器共包括两步,第一步控制器为位置跟踪,通过设计一个理想虚拟控制量(力)来实现执行器的轨迹跟踪,第二步为力跟踪,同过设计实际的系统控制输入(电机转速)来实现对第一步理想虚拟控制量的跟踪。此外,在第一步中,建立包含惯性负载估计的自适应律,来实现负载的在线精确估计。
6、3)将电动静液作动器的作业目标轨迹以及输出测量值输入自适应反步控制器中,自适应反步控制器对电动静液作动器的惯性负载进行自适应迭代更新,并在控制器中实现负载补偿,最终输出控制输入对电动静液作动器系统实现有效的跟踪控制。
7、电动静液作动器主要组成包括液压缸执行器、液压泵、伺服电机以机流量匹配阀等组成。伺服电机通过连接液压泵直接带动泵旋转,液压泵通过阀块连接液压缸执行器,从而实现执行器的进出油。同时,流量匹配阀的作用是来补偿由于非对称缸所导致的流量非匹配性。
8、所述的步骤1)中,建立的包含外部惯性负载的电动静液作动器的系统非线性动力学模型具体如下,包括液压缸执行器动力学模型和液压系统动力学模型:
9、
10、fl=p1a1-p2a2
11、
12、
13、
14、其中,ml为电动静液作动器的液压缸活塞和未知惯性负载的有效总质量;xl、和分别为电动静液作动器的液压缸执行器的位移、速度和加速度;p1和p2分别为电动静液作动器的无杆腔和有杆腔的压力;a1和a2分别为电动静液作动器的无杆腔活塞面积和有杆腔活塞面积;bm为液压缸执行器的粘性摩擦系数;af为液压缸执行器的库伦摩擦系数;sf(·)为近似开关函数sgn(·)平滑过渡函数;d()为由于电动静液作动器的外干扰、未建模摩擦力和其它难以建模的扰动等引起的集总不确定非线性项,|d()|<|dm|,dm为预设常数;fl为电动静液作动器的输出作业力;dn为集总不确定非线性项d()的标称值,是一个恒定值或缓慢变化的值;δd为电动静液作动器的不确定的非线性项,||δd||≤εd,εd>0,εd为正常数;v1和v2分别为液压无杆腔和有杆腔的容积,v1=v01+a1xl,v2=v02-a2xl,v01和v02分别为液压无杆腔的容积v1和有杆腔的容积v2的初始值;βe为有效弹性模量;q1和q2分别为液压无杆腔和有杆腔的流量;ci是液压缸的内泄露系数。
15、所述的液压无杆腔的流量q1和有杆腔的流量q2具体如下:
16、a)在伸出工况下,液压泵向无杆腔泵流:
17、q1=qp,q2=qp-qc
18、qp=dpω-cp(pp-pt)
19、
20、b)在缩回工况下,液压泵向有杆腔泵流:
21、q1=qp+qc,q2=qp
22、其中,qp为电动静液作动器的液压泵流量;qc为液压泵流量补偿;dp为定量液压泵排量;ω为液压泵的转速;cp为液压泵泄露流量系数;pp和pt分别为液压泵出、入口压力。
23、在伸出与缩回情况下,系统的流量补偿qc的方向是不同的。因此,需要对伸出与缩回情况分开建模。系统的流量q1和q2与变转速泵的流量和转速及其泄露有关。由于液压缸为非对称缸,为了补偿在活塞移动过程液压缸两侧的流量变化并不一样,需要有补充流量qc来进行流量平衡。
24、所述的步骤2)中,自适应反步控制器包括自适应函数τ和自适应控制律fld,具体如下:
25、a)自适应函数τ:
26、
27、
28、
29、
30、其中,φm()和φmf分别为电动静液作动器的参数估计矩阵对应的系数回归矩阵及其滤波结果;xl和分别为电动静液作动器的液压缸执行器的位移和速度;z2为电动静液作动器的预设位置转换误差;κm为自适应函数τ的正定增益;wm为自适应函数τ的自适应律辅助项,其包含参数的估计误差项;fm和fmf分别为自适应函数τ的力辅助项及其滤波结果;fl为电动静液作动器的输出作业力;bm为液压缸执行器的粘性摩擦系数;x2为液压缸执行器的速度的状态变量;af为液压缸执行器的库伦摩擦系数;sf(·)为近似开关函数sgn(·)平滑过渡函数;φf为电动静液作动器的系统整体回归矩阵的滤波结果;φl和φlf分别为自适应函数τ的辅助回归矩阵及其滤波结果;k为常数滤波参数,k>0;pm(t)、qm(t)和wm(t)分别为t时刻自适应函数τ的第一、第二和第三辅助变量,用来构建参数估计误差项,和分别为t时刻自适应函数τ的第一和第二辅助变量的微分;l为可调参数,l>0。
31、b)自适应控制律fld:
32、
33、
34、z1=xl-x1d
35、
36、
37、其中,fld是自适应函数τ的理想输出虚拟控制量;和分别为自适应控制律fld的第一模型参数ml和第二模型参数dn的参数估计值;x2eq和分别为电动静液作动器的作动杆的预设速度和加速度;k2为预设位置转换误差z2的正定反馈增益系数;x1d和分别为电动静液作动器作动杆的跟踪期望位移及其导数;z1和k1分别为电动静液作动器中作动杆的实际位移xl和跟踪位移的误差及其正定反馈增益系数;w是自适应反步控制器的控制输入;β为中间等效变量;dp为定量液压泵排量;a1和a2分别为电动静液作动器的无杆腔活塞面积和有杆腔活塞面积;c为液压缸执行器的总等效泄露系数;x3和x4分别为电动静液作动器的无杆腔的压力p1和有杆腔的压力p2的状态变量;为自适应控制律fld的微分可计算部分;z3和k3分别为电动静液作动器的力参数误差及其正定反馈增益系数;ml为电动静液作动器的液压缸活塞和未知惯性负载的有效总质量;βe为有效弹性模量;v1和v2分别为液压无杆腔和有杆腔的容积。
38、电动静液作动器的作业目标轨迹为电动静液作动器作动杆的跟踪期望位移x1d,输出测量值包括电动静液作动器的液压缸执行器的位移xl和速度xl以及无杆腔的压力p1和有杆腔的压力p2。
39、所述的步骤3)中,自适应反步控制器将对电动静液作动器的惯性负载进行自适应迭代更新,具体如下:
40、
41、
42、其中,θm为电动静液作动器的惯性负载的未知参数向量;和分别为电动静液作动器的惯性负载的参数估计矩阵及其微分,即为参数估计矩阵的变化律;为惯性负载的未知参数向量θm的初始值;ts为自适应反步控制器的采样时间;γ为预设的正定的对角参数自适应增益矩阵;τ为电动静液作动器的系统自适应函数。
43、电动静液作动器的惯性负载的参数估计矩阵是更新后的参数估计向量并作为下一次迭代的参数自适应初始矩阵。
44、基于第一步控制器中的跟踪误差值和自适应函数,利用参数在线自适应估计的方法对整个系统的未知参数向量θm进行自适应迭代。
45、本发明建立包含外部惯性负载的电动静液作动器非线性系统动力学模型,基于模型的状态变量和目标轨迹建立电动静液作动器的负载估计自适应律以及补偿惯性负载的自适应反步控制器;建立的负载估计自适应律中通过构建参数的估计误差来保证在线估计的收敛性能,在作业过程中,通过对负载参数的不断自适应迭代更新,并在控制器中进行补偿,实现对电动静液作动器的有效控制。
46、本发明的有益效果是:
47、本发明考虑到电动静液作动器在作业过程中存在承受外部未知负载的影响,提出了一种具有惯性负载估计补偿的电动静液作动器自适应反步控制方法,通过设计在线的参数自适应律来不断更新未知参数,从而最终获得系统未知负载重量的精确估计值,并且在控制器中对负载进行补偿,克服控制过程中未知负载带来影响,最终提升电动静液作动器的控制性能。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199701.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表