一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法
- 国知局
- 2024-07-31 23:54:07
本发明公开一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,控制系统。
背景技术:
1、平流层飞艇作为临近空间飞行器的一种,具有可回收、可重复使用,载荷可维修、可更换、可以长期驻留在区域上空等特点,在环境监测、通信中继和应急救灾等领域得到了广泛的应用,成为先进国家和企业组织竞相研究发展的重点项目。平流层飞艇通过调整姿态实现特定轨迹的跟踪进而执行飞行任务,因此高精度的轨迹跟踪控制是平流层飞艇飞行控制系统设计的关键。然而,飞艇在运动过程中惯性特征十分明显,本身是一个非线性、强耦合的多变量系统,并且存在参数不确定性和外部扰动等多源干扰。此外,飞艇在飞行过程中,会受到风场等外部扰动的影响,造成控制器控制精度下降,在现有的技术条件下,实时获取风场扰动是很困难的。这些因素给轨迹跟踪控制设计带来巨大挑战。
技术实现思路
1、本发明的目的在于提供一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,以解决现有技术中,飞艇运动难以控制的问题。
2、一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,包括:
3、s1建立飞艇的六自由度运动学方程和动力学方程,推导实际控制输入;
4、s2推导飞艇的轨迹跟踪误差模型,将飞艇轨迹指令的跟踪转化为轨迹跟踪误差的收敛;
5、s3设计预设性能函数:
6、;
7、;
8、式中,和是预设性能函数的上、下界,为从收敛到的预设最大允许收敛时间,为轨迹跟踪误差在0时刻的值,是时间;
9、s4对于飞艇的轨迹跟踪误差模型设计rbf神经网络的自适应律:
10、;
11、;
12、式中,表示飞艇的质量矩阵,是对角阵,为总扰动的估计,是误差函数,为对中间参数进行幂次运算,、、和为正数,为列向量与列向量的点乘,为对轨迹跟踪误差的导数进行幂次运算,为对虚拟控制器进行幂次运算;
13、s5基于rbf神经网络设计具有固定时间轨迹跟踪的控制器。
14、飞艇的六自由度运动学方程包括:
15、;;;;;
16、;
17、;
18、式中,是的导数,是的导数,是坐标的矩阵,是飞艇的滚转角、俯仰角和偏航角三个角度的矩阵,是速度矢量在各个轴的分量的矩阵,是飞艇的滚转、俯仰和偏航角速度三个速度的矩阵,x,y,z分别为飞艇的轴向、侧向和竖直方向上的位移,u,v,w分别为速度矢量在各个轴的分量,p,q,r分别为飞艇的滚转、俯仰和偏航角速度,和为中间矩阵。
19、飞艇的动力学方程包括:
20、;;
21、;;;;
22、式中,是的导数,是的导数,是飞艇所受惯性力,是飞艇所受重力浮力的合力,是飞艇所受气动力,是飞艇所受推力,是飞艇所受惯性力矩,是飞艇所受重力矩浮力矩的合力矩,是飞艇所受气动力矩,是飞艇所受推力矩;为浮空器的轴向气动系数,为浮空器的纵向气动系数,为浮空器的俯仰力矩气动系数;
23、、分别为飞艇的参考面积和长度,为飞艇的体积,为动压,为大气密度,、、为三个方向上的风速。
24、控制输入为,,实际控制输入为:
25、;;
26、式中,为系数矩阵,为力矩阵,分别是不同螺旋桨产生的力。
27、不考虑参数不确定以及外部扰动时,改写飞艇的动力学方程:
28、;;;;
29、;;
30、式中,为中间矩阵,为中间矩阵,为不考虑参数不确定以及外部扰动时的飞艇所受气动力,为不考虑参数不确定以及外部扰动时的飞艇所受气动力矩,为参数不确定项,为风致附加气动力。
31、改写飞艇的六自由度运动学方程:
32、;;;;
33、式中,是的导数,为位移和角度的联合矩阵,是的导数,为速度矢量和速度的联合矩阵。
34、飞艇的轨迹跟踪误差模型为:
35、;;;;
36、式中,是位移和角度的联合矩阵与期望轨迹指令的差,是的导数,是速度矢量和速度的联合矩阵与期望速度指令的差,是的导数,是对角阵,是期望角度命令下的,是期望角度命令下的,是期望轨迹指令,是期望速度指令,是的导数。
37、改写轨迹跟踪误差模型为:
38、;;;;
39、;
40、式中,为的导数,为的导数,为轨迹误差,为速度误差,是的导数,是的导数。
41、设计神经网络自适应律为:
42、;;;
43、式中,和是正数,是网络高斯基函数的输出,是网络权值估计值,为网络的理想权值,为网络权值估计误差,是的导数,是速度信号和角速度信号。
44、系数矩阵为:
45、;;
46、;
47、;;
48、式中,为飞艇螺旋桨位置到机体体积中心的距离。
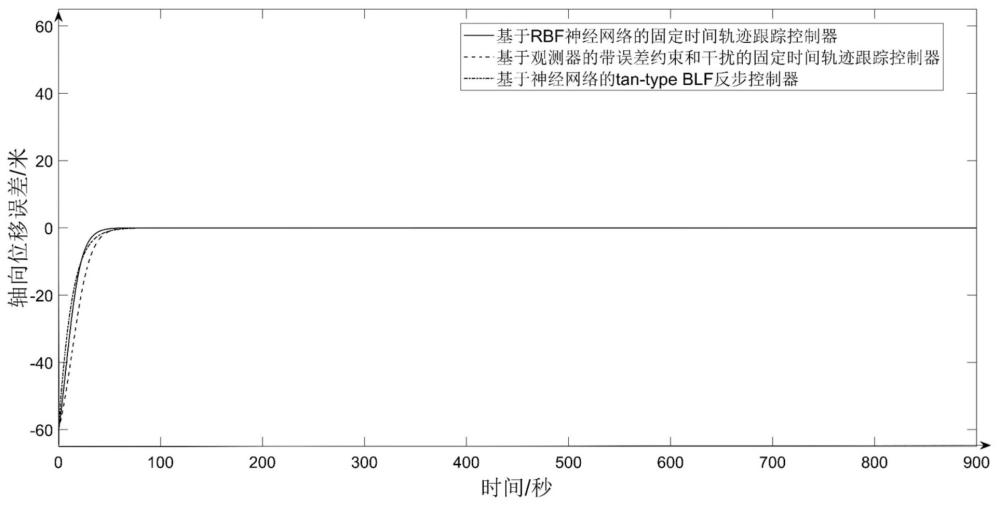
49、相对比现有技术,本发明具有以下有益效果:灵活地设置达到稳态边界所需的时间;选用tan型障碍lyapunov函数处理误差约束问题,并在此基础上增加功率积分器,确保轨迹跟踪误差在固定时间内快速收敛。
技术特征:1.一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,其特征在于,包括:
2.根据权利要求1所述的一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,其特征在于,飞艇的六自由度运动学方程包括:
3.根据权利要求2所述的一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,其特征在于,飞艇的动力学方程包括:
4.根据权利要求3所述的一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,其特征在于,控制输入为,,实际控制输入为:
5.根据权利要求4所述的一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,其特征在于,不考虑参数不确定以及外部扰动时,改写飞艇的动力学方程:
6.根据权利要求5所述的一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,其特征在于,改写飞艇的六自由度运动学方程:
7.根据权利要求6所述的一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,其特征在于,飞艇的轨迹跟踪误差模型为:
8.根据权利要求7所述的一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,其特征在于,改写轨迹跟踪误差模型为:
9.根据权利要求8所述的一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,其特征在于,设计神经网络自适应律为:
10.根据权利要求9所述的一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,其特征在于,系数矩阵为:
技术总结本发明公开一种具有时变误差约束的飞艇固定时间轨迹跟踪控制方法,控制系统技术领域,用于控制飞艇,包括建立平流层飞艇的数学模型,并推导出轨迹跟踪误差模型。然后,设计了一种新型的预设性能函数,即误差约束函数,将障碍Lyapunov函数和功率积分器相结合,确保跟踪误差在预定义的约束范围内,并使飞艇无论初始条件如何均能在有限时间收敛到期望轨迹。最后,利用RBF神经网络对参数不确定项和外部扰动进行估计补偿,使系统的鲁棒性得以增强。本发明所设计的控制方案无需依赖精确的模型以及扰动的先验知识,即可使平流层飞艇有效跟踪期望轨迹,并具有较好的控制精度和误差收敛速度。技术研发人员:李智斌,何德萍,李智受保护的技术使用者:山东科技大学技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240730/199067.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。