一种基于模糊控制的扭矩螺栓控制系统
- 国知局
- 2024-07-31 23:54:04
本发明涉及扭矩螺栓,具体涉及一种基于模糊控制的扭矩螺栓控制系统。
背景技术:
1、扭矩螺栓是螺栓的一种,其重点在于螺栓的扭矩特性。螺栓扭矩是指在螺栓拧紧过程中所需的扭矩值,正确的螺栓扭矩是保证连接体稳固和安全的重要因素。在实际应用中,扭矩螺栓广泛应用于汽车制造和维修、机械制造、建筑行业、电子行业等多个领域,用于连接和固定各种部件和结构,确保它们的安全性和稳定性。
2、然而,由于螺栓连接的复杂性和影响因素的多样性,传统的控制方法往往难以实现精确的扭矩控制,例如pid(比例-积分-微分)控制,它根据系统当前的误差、已经积累的误差以及系统误差的变化率来计算系统输出的控制量,但pid控制在处理复杂非线性系统或存在大量干扰的情况下,可能难以达到精确的扭矩控制,因此,提出一种基于模糊控制的扭矩螺栓控制系统,通过模糊规则和推理来实现对扭矩的精确控制。
技术实现思路
1、本发明的目的在于提供一种基于模糊控制的扭矩螺栓控制系统,用以解决背景技术中提到的问题。
2、本发明的目的可以通过以下技术方案实现:
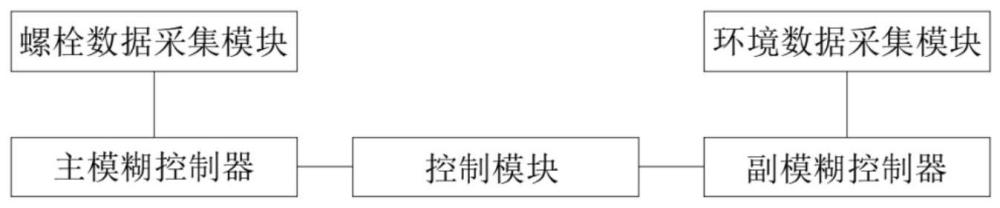
3、一种基于模糊控制的扭矩螺栓控制系统,包括:
4、螺栓数据采集模块,用于采集目标扭矩螺栓拧紧过程中的当前扭矩值;
5、主模糊控制器,基于模糊控制算法,根据所述当前扭矩值计算得到基准预调扭矩值;
6、环境数据采集模块,用于采集所述目标扭矩螺栓拧紧过程中的环境数据;
7、副模糊控制器,基于模糊控制算法,根据所述环境数据计算得到调整预调扭矩值;
8、控制模块,用于接收所述基准预调扭矩值和调整预调扭矩值,根据所述调整预调扭矩值对所述基准预调扭矩值进行补偿计算,得到目标调整扭矩值。
9、优选的,根据所述调整预调扭矩值对所述基准预调扭矩值进行补偿计算,得到目标调整扭矩值的过程包括:
10、通过公式:
11、
12、计算目标调整扭矩值f目标;
13、其中,α1为基准系数,α2为调整系数,f(1)基准为所述基准预调扭矩值,f(2)调整为所述调整预调扭矩值。
14、优选的,采集所述目标扭矩螺栓拧紧过程中的当前扭矩值的过程包括:
15、对所述目标扭矩螺栓的拧紧过程进行阶段划分;
16、根据划分的阶段的不同设置不同的采集周期;
17、根据所述采集周期获取各个采集时间点的当前扭矩值。
18、优选的,对所述目标扭矩螺栓的拧紧过程进行阶段划分的阶段包括初步拧紧阶段、真正拧紧阶段和塑性变形阶段。
19、优选的,所述控制系统还包括根据所述目标调整扭矩值与预设调整扭矩标准值调整所述采集周期:
20、当所述目标调整扭矩值不满足所述预设调整扭矩条件,通过公式:
21、
22、
23、
24、分别计算所述初步拧紧阶段、真正拧紧阶段和塑性变形阶段的周期调整系数σ1、σ2和σ3;
25、根据所述周期调整系数σ1、σ2和σ3调整所述采集周期;
26、其中,f1i为所述初步拧紧阶段中第i次获得的目标调整扭矩值,f10为所述初步拧紧阶段的预设调整扭矩标准值,其中,δf10为所述初步拧紧阶段的预设差值;f2j为所述真正拧紧阶段中第j次获得的目标调整扭矩值,f20为所述真正拧紧阶段的预设调整扭矩标准值,其中,δf20为所述真正拧紧阶段的预设差值;f3k为所述塑性变形阶段中第k次获得的目标调整扭矩值,f30为所述塑性变形阶段的预设调整扭矩标准值,其中,δf30为所述塑性变形阶段的预设差值;y1、y2和y3分别为所述初步拧紧阶段、真正拧紧阶段和塑性变形阶段的目标扭矩周期转换函数。
27、优选的,当所述目标调整扭矩值满足所述预设调整扭矩条件,且所述基准预调扭矩值和调整预调扭矩值中存在不满足对应阈值条件时,根据所述基准预调扭矩值和调整预调扭矩值调整所述采集周期:
28、通过公式:
29、
30、
31、
32、分别计算所述初步拧紧阶段、真正拧紧阶段和塑性变形阶段的周期调整系数σ1、σ2和σ3;
33、其中,f(1)1i为所述初步拧紧阶段中第i次获得的基准预调扭矩值,f(1)10为所述初步拧紧阶段的基准预调扭矩初始值,δf(1)10为所述初步拧紧阶段的预设基准状态值,f(2)1i为所述初步拧紧阶段中第i次获得的调整预调扭矩值,f(2)10为所述初步拧紧阶段的调整预调扭矩初始值,δf(2)10为所述初步拧紧阶段的预设调整状态值;f(1)2j为所述真正拧紧阶段中第j次获得的基准预调扭矩值,f(1)20为所述真正拧紧阶段的基准预调扭矩初始值,δf(1)20为所述真正拧紧阶段的预设基准状态值,f(2)2j为所述真正拧紧阶段中第j次获得的调整预调扭矩值,f(2)20为所述真正拧紧阶段的调整预调扭矩初始值,δf(2)20为所述真正拧紧阶段的预设调整状态值;f(1)3k为所述塑性变形阶段中第k次获得的基准预调扭矩值,f(1)30为所述塑性变形阶段的基准预调扭矩初始值,δf(1)30为所述塑性变形阶段的预设基准状态值,f(2)3k为所述塑性变形阶段中第k次获得的调整预调扭矩值,f(2)30为所述塑性变形阶段的调整预调扭矩初始值,δf(2)30为所述塑性变形阶段的预设调整状态值;μ1、μ21、μ22和μ23为预设权重系数;g1、g2和g3分别为所述初步拧紧阶段、真正拧紧阶段和塑性变形阶段的预调扭矩周期转换函数。
34、优选的,所述基准预调扭矩值和调整预调扭矩值中存在不满足对应阈值条件的情况包括:
35、当所述基准预调扭矩值不满足对应阈值条件,但所述调整预调扭矩值满足对应阈值条件时:
36、在初步拧紧阶段:μ1=1,μ21=0;
37、在真正拧紧阶段:μ1=1,μ22=0;
38、在塑性变形阶段:μ1=1,μ23=0;
39、当所述基准预调扭矩值满足对应阈值条件,但所述调整预调扭矩值不满足对应阈值条件时:
40、在初步拧紧阶段:μ1=0,
41、在真正拧紧阶段:μ1=0,
42、在塑性变形阶段:μ1=0,
43、其中,ρ为预设常数值;
44、当所述基准预调扭矩值和调整预调扭矩值均不满足对应阈值条件时:
45、在初步拧紧阶段:μ1+μ21=1;
46、在真正拧紧阶段:μ1+μ22=1;
47、在塑性变形阶段:μ1+μ23=1;
48、其中,μ23>μ21>μ22且μ23>μ21+μ22。
49、优选的,根据所述周期调整系数σ1、σ2和σ3调整所述采集周期的过程包括:
50、通过公式:
51、t1(i+1)=t1+σ1*δt1
52、t2(j+1)=t2+σ2*δt2
53、t3(k+1)=t3+σ3*δt3
54、分别计算所述初步拧紧阶段、真正拧紧阶段和塑性变形阶段调整后的周期;
55、其中,t1(i+1)为所述初步拧紧阶段中第i+1次的采集周期,t1为所述初步拧紧阶段的初始采集周期,δt1为所述初步拧紧阶段的预设周期调整时段;t2(j+1)为所述真正拧紧阶段中第j+1次的采集周期,t2为所述真正拧紧阶段的初始采集周期,δt2为所述真正拧紧阶段的预设周期调整时段;t3(k+1)为所述塑性变形阶段中第k+1次的采集周期,t3为所述塑性变形阶段的初始采集周期,δt3为所述塑性变形阶段的预设周期调整时段。
56、本发明的有益效果:
57、该基于模糊控制的扭矩螺栓控制系统,通过将获取的当前扭矩值输入到主模糊控制器中,主模糊控制器根据预设的模糊集合和规则进行推理,输出一个基准预调扭矩值,以当前扭矩值作为输入量,从而确保获得的基准预调扭矩值适应当前的拧紧状态,提高了控制精度;同时通过将目标扭矩螺栓拧紧过程中的环境数据输入到副模糊控制器中,副模糊控制器根据预设的模糊集合和规则进行推理,输出一个调整预调扭矩值;最后根据调整预调扭矩值对基准预调扭矩值进行补偿计算,从而添加考虑环境因素对扭矩的影响,对基准预调扭矩值进行修正,进而进一步实现对扭矩的精确控制。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199058.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表