一种基于事件触发无人船数字孪生模型的平行控制器
- 国知局
- 2024-07-31 23:54:02
本发明涉及无人船平行控制,具体而言,尤其涉及一种基于事件触发无人船数字孪生模型的平行控制器。
背景技术:
1、海洋蕴藏着丰富的自然资源,对人类的生存和可持续发展至关重要。无人船作为一种自主性高、灵活性强、成本低的海洋探索与开发工具,已在多种作业场景中得到广泛应用,如海洋环境监测、数据收集、资源勘探、海上搜救、海岸监视以及侦察巡逻等。与此同时,无人船是一种典型的融合了计算、通信和控制的物理信息系统,其复杂程度随着网络化趋势不断增加,如何实现对该复杂系统的有效控制仍然是学术界亟待解决的一个问题。近年来,平行控制作为一种求解复杂物理信息系统控制问题的有效范式,在各研究领域获得了广泛的关注和应用。不同于传统的控制技术,平行控制旨在将实际系统的控制问题扩展到虚拟空间中,通过二者的虚实交互,以平行执行的方式,实现对复杂系统的有效控制。
2、现有关于无人船平行控制方法,存在如下问题:
3、第一,现有无人船平行控制方法往往采用基于数据统计的建模方法构建虚拟无人船系统,其表征能力有限,难以有效应对动态变化的复杂海洋环境。
4、第二,现有无人船平行控制方法中,实际系统和所构建的虚拟无人船系统是实时通讯的,对船岸之间的通讯要求比较高,当通讯状态变差后很难达到良好的控制效果,且会造成大量的通讯资源浪费。
5、第三,现有无人船平行控制方法中,所设计的控制律往往是基于时间触发的,产生的控制信号实时更新,这会导致执行器不断动作,进而加快其机械结构的磨损,缩短其使用寿命。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种基于事件触发无人船数字孪生模型的平行控制器,以解决现有无人船平行控制方法表征能力有限的技术问题。
2、本发明采用的技术手段如下:
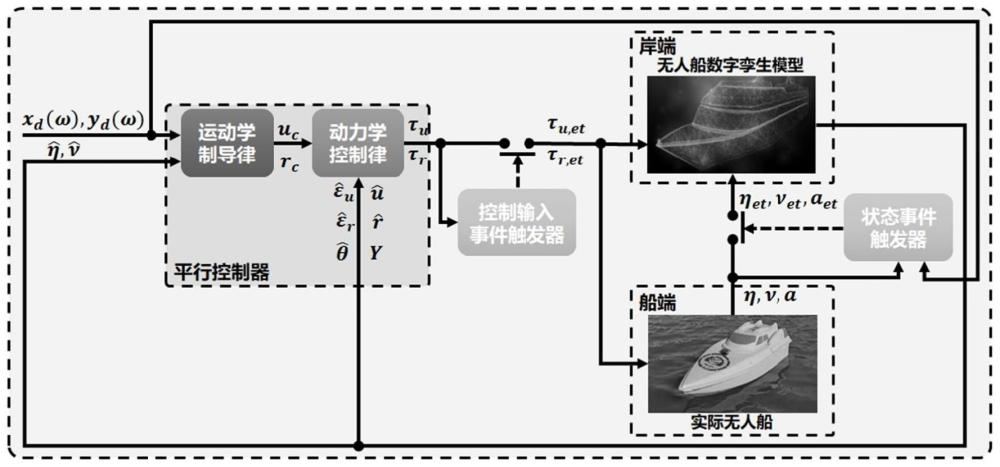
3、一种基于事件触发无人船数字孪生模型的平行控制器,包括无人船数字孪生模型、状态事件触发器、实际无人船、运动学制导律、动力学控制律和控制输入事件触发器;
4、所述无人船数字孪生模型接收来自控制输入事件触发器的触发后的前向推力τu,et和转向力矩τr,et和状态事件触发器的触发后的实际无人船位置信息ηet、速度信息νet、加速度信息aet,所述无人船数字孪生模型发送虚拟无人船位置信息和速度信息到运动学制导律,发送虚拟无人船前向速度艏摇角速度前向速度方向建模误差艏摇角速度方向建模误差以及系统总扰动预测值到动力学控制律;
5、所述状态事件触发器接收给定参考信号xd(ω)、yd(ω)和来自实际无人船的位置信息η、速度信息ν、加速度信息a,所述状态事件触发器发送触发后的实际无人船位置信息ηet、速度信息νet、加速度信息aet到无人船数字孪生模型;
6、所述实际无人船接收来自控制输入事件触发器的前向推力τu,et和转向力矩τr,et,所述实际无人船发送实际无人船位置信息η、速度信息ν、加速度信息a到状态事件触发器;
7、所述运动学制导律接收给定参考信号xd(ω)、yd(ω)和来自无人船数字孪生模型的虚拟无人船位置信息速度信息所述运动学制导律发送前向制导速度uc、艏摇角方向制导速度rc到动力学控制律;
8、所述动力学控制律接收来自运动学制导律的前向制导速度uc、艏摇角方向制导速度rc和来自无人船数字孪生模型的虚拟无人船前向速度艏摇角速度前向速度方向建模误差艏摇角速度方向建模误差以及系统总扰动预测值所述动力学控制律发送前向推力τu和转向力矩τr到控制输入事件触发器;
9、所述控制输入事件触发器接收来自动力学控制律的前向推力τu和转向力矩τr,所述控制输入事件触发器发送触发后的前向推力τu,et和转向力矩τr,et到无人船数字孪生模型和所述实际无人船。
10、进一步地,所述实际无人船的数学模型为:
11、
12、其中,η=[x,y,ψ]t∈r3为地球坐标系中无人船的位置和航向信息,[·]t表示向量的转置;ν=[u,v,r]t∈r3为船体坐标系中无人船的纵荡、横荡和艏摇角速度;g(ν)∈r3为向心力和科里奥利力系数矩阵、阻尼矩阵;m=diag{mu,mv,mr}为无人船的惯性矩阵,diag表示对角矩阵;τ=[τu,0,τr]t∈r3为控制输入;τw∈r3为外部海洋环境扰动;a∈r3为无人船加速度信息,r(ψ)∈r3×3为旋转矩阵,表示为:
13、
14、进一步地,所述无人船数字孪生模型的建立步骤如下:
15、采用深度网络建模系统总扰动,将实际无人船动力学模型改写为
16、a=yθ+m-1τ+ε (3)
17、其中,y为由深度网络构建的基函数;θ∈r3n为网络输出层权重,ε表示建模误差;
18、采用元学习技术训练网络,其优化目标为:
19、
20、通过优化上述学习目标,获取基函数y;
21、所述无人船数字孪生模型如下:
22、
23、其中,是η,ε,θ的估计值;是正定系数矩阵;是可调参数;分别为η,ν,a触发后的状态。
24、进一步地,所述状态事件触发器的建立步骤如下:
25、定义(x,y)处实际无人船沿路径方向跟踪误差xe和垂直路径方向跟踪误差ye为:
26、
27、其中,为路径切向角;
28、所述状态事件触发器如下:
29、
30、
31、
32、
33、
34、其中,分别表示x,y,ψ,ν,a的测量误差;分别表示对应事件触发阈值;ι为设定的小常数,表示下一个触发时刻,表示最后触发的时刻,设定
35、进一步地,所述运动学制导律的建立步骤如下:
36、定义处虚拟无人船沿路径方向跟踪误差和垂直路径方向跟踪误差为:
37、
38、所述运动学制导律如下:
39、
40、其中,是控制增益;是侧滑角;为视距距离;为合速度;μ=sin(ψet-ψd+β)-sin(ψc-ψd+β)为简化系数项,ν0为期望路径更新率,ω为路径参数。
41、进一步地,所述动力学控制律如下:
42、
43、其中,为控制增益。
44、进一步地,所述控制输入事件触发器的事件触发机制如下:
45、
46、
47、其中,为测量误差;和为对应事件触发阈值。
48、较现有技术相比,本发明具有以下优点:
49、第一,与现有无人船平行控制方法相比,本发明利用元学习技术精准捕获不同海况下环境无关特征项,克服了传统的基于数据统计的建模方法环境适应能力弱的缺点,实现了不同海况下无人船模型动态特征的有效积累。
50、第二,与现有无人船平行控制方法相比,本发明构建了一种基于事件触发的无人船数字孪生模型,克服了实际系统与虚拟系统实时通讯造成的通讯资源浪费,有效降低无人船作业成本。
51、第三,与现有无人船平行控制方法相比,本发明提出了一种基于事件触发的动力学控制律,克服了由传统实时通讯方式造成的执行器频繁动作,有效延长了执行器的使用寿命。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199054.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表