一种拖拉机悬挂机具电控装置的控制系统的制作方法
- 国知局
- 2024-07-31 23:54:05
本技术涉及一种拖拉机悬挂机具电控装置的控制系统,属于拖拉机电控。
背景技术:
1、当前,我国农业现代化加速发展,农村土地规模经营、农业劳动力大量转移,对农机装备技术要求更高,产品需求巨大。加快发展智慧农业、智能农机无人驾驶技术,提升农机装备供给能力、缩小与国外主流产品差距、支撑现代农业发展、保障粮食和产业安全意义重大。
2、现有技术当中,依靠高线束激光雷达以及全球定位系统已经基本实现拖拉机的自动行驶,然而拖拉机在田间作业是通过操控其悬挂机具进行田间翻土、播种、除草等工作,而这些工作经常需要根据田间的具体情况(如地头拐弯)进行调整,悬挂机具无法实现自动控制,也就无法实现拖拉机真正的自动驾驶,操控悬挂机具仍然是由驾驶员完成,操作复杂繁琐,驾驶员的操作难度高,工作量较大,工作舒适度低,并且工作效率不高。
技术实现思路
1、本实用新型针对背景技术中的不足,提供一种拖拉机悬挂机具电控装置的控制系统,可以实现悬挂机具的自动控制,操控简单,工作效率高,并能够实现远程操控。
2、为解决以上技术问题,本实用新型采用以下技术方案:
3、一种拖拉机悬挂具电控装置的控制系统,包括单片机、can控制器、tcu控制器、操控手柄和控制电路,单片机通过控制电路实现对拖拉机悬挂机具的伸缩和提升的控制;
4、所述控制电路包括can收发电路、电源电路、单片机下载电路、晶振电路、电磁阀输出电路、模拟量输入电路和按键输入电路,所述电源电路对单片机和其他电路提供电源。
5、进一步地,所述tcu控制器和can控制器通过can收发电路与单片机通信,操控手柄通过模拟量输入电路和按键输入电路对悬挂机具发出控制指令,can控制器通过can地址对悬挂机具发出控制指令;
6、所述单片机根据控制指令通过电磁阀输出电路发出动作指令,控制悬挂机具动作。
7、进一步地,所述操控手柄的按键包括模式旋钮、功能键、下降指示灯、下降键、上限位旋钮、强降按键、强降指示灯、备用旋钮、下限位旋钮、上升键、上升指示灯、四路多路阀收缩按键和伸出按键,收缩按键包括b1键、b2键、b3键、b4键,伸出按键包括a1键、a2键、a3键、a4键。
8、进一步地,所述电源电路包括芯片u1的1脚连接有电源vcc2和电容c1的一端,电源vcc2连接有二极管d1和二极管d2的负极,二极管d1的正极与电源vcc相连,二极管d2的正极与电容c1的另一端与芯片u1的3脚相连,并接地,芯片u1的2脚与二极管d3的负极连接有电感l1的一端,电感l1的另一端连接有电容c2和芯片u1的4脚,并输出+5v电压,电容c2的另一端与二极管d3的正极相连,并接地,电感l1的另一端还连接有电容c3和电容c4的一端,并连接于芯片u2的3脚,芯片u2的2脚连接有电容c5的一端、电容c6的一端和电阻r1的一端,并向外输出+3.3v电压,芯片u2的1脚连接有电容c5的另一端、电容c6的一端、电容c3的另一端和电容c4的另一端,并接地,电阻r1的另一端连接有电容c7的一端、电容c8的一端、电容c9的一端、电容c10的一端和单片机的22脚,单片机的22脚与单片机的21脚相互连接,电容c7的另一端、电容c8的另一端、电容c9的另一端和电容c10的另一端接地。
9、进一步地,所述can收发电路包括芯片u9,芯片u9的1脚与单片机的71脚相连,芯片u9的2脚与电容c35的一端相连并接地,电容c35的另一端连接有+5v和芯片u9的3脚,芯片u9的4脚与单片机的70脚相连,芯片u9的8脚与电阻r41的一端相连,电阻r41的另一端接地,芯片u9的7脚连接有r44的一端和电容c36的一端,芯片u9的6脚连接有电容c37和电阻r42的一端,r44的另一端和电阻r42的另一端分别与esd保护器一端两脚相连,esd保护器的另一端连接有电容c36的一端、电容c37的一端和电阻r8的一端,并接地,电阻r8的另一端与单片机的37脚相连,电阻r44另一端还连接有r43的一端和canh接点,电阻r42的另一端还连接有r43的另一端和canl接点。
10、进一步地,所述单片机下载电路包括芯片h1,芯片h1的5脚连接有电阻r3的一端、电阻r4的一端、电阻r5的一端、电容c14的一端、芯片u2的2脚和单片机的6脚,单片机的6脚、单片机的50脚、单片机的75脚、单片机的100脚、单片机的28脚和单片机的11脚相互连接,芯片h1的4脚连接有r3的另一端和单片机的72脚,芯片h1的3脚连接有r4的另一端、r6的一端和单片机的76脚,芯片h1的2脚连接有电阻r5的另一端、电容c13的一端和单片机的14脚,芯片h1的1脚连接有r6的另一端、电容c13的另一端、电容c14的另一端、电阻r8的一端和单片机的99脚,并接地。
11、进一步地,所述模拟量电路包括电阻开关、上限位旋钮和下限位旋钮,电阻开关的2脚接地,电阻开关的1脚连接有电阻r13的一端、电阻r15的一端和电容c19的一端,电阻r15的另一端连接有电容c20和单片机的26脚,电阻c19的另一端和电阻c20的另一端相连,并接地;上限位旋钮的一端接地,另一端连接有电阻r18的一端、电阻r20的一端和电容c22的一端,电阻r18的另一端连接有电容c21的一端和单片机的25脚,电阻c22的另一端和电阻c21的另一端相连,并接地;下限位旋钮的一端接地,另一端连接有电阻r94的一端、电阻r92的一端和电容c71的一端,电阻r92的另一端连接有电容c70和单片机的24脚,电阻c70的另一端和电阻c71的另一端相连,并接地;电阻r13的另一端、电阻r20的另一端和电阻r94的另一端连接有电阻r87的一端,并链接有+3.3v电源,电阻r87的另一端连接有电阻89的一端、电阻r88的一端和电容c68的一端,电阻89的另一端连接有电容c69的一端、电阻r90的一端和单片机的23脚,电阻r88的另一端、电容c68的另一端、电容c69的另一端和电阻r90的另一端相连接;
12、电阻r28的一端、电阻r21的一端、电阻r45的一端和电阻r54的一端连接+3.3v电源,电阻r28的另一端连接有电阻r27的一端、电阻r26的一端和电容c26的一端,电阻r26的另一端连接有电容c25的一端、电阻r25的一端和单片机的29脚,电阻r27的另一端、电容c26的另一端、电容c25的另一端和电阻r25的另一端相连接;电阻r21的另一端连接有电阻r22的一端、电阻r23的一端和电容c23的一端,电阻r23的另一端连接有电容c24的一端、电阻r24的一端和单片机的30脚,电阻r22的另一端、电容c23的另一端、电容c24的另一端和电阻r24的另一端相连接;电阻r45的另一端连接有电阻r46的一端、电阻r47的一端和电容c64的一端,电阻r47的另一端连接有电容c65的一端、电阻r48的一端和单片机的31脚,电阻r46的另一端、电容c64的另一端、电容c65的另一端和电阻r48的另一端相连接, 电阻r54的另一端连接有电阻r52的一端、电阻r53的一端和电容c67的一端,电阻r52的另一端连接有电容c66的一端、电阻r51的一端和单片机的32脚,电阻r53的另一端、电容c67的另一端、电容c66的另一端和电阻r51的另一端相连接。
13、进一步地,所述按键输入电路包括上升开关sw1、下降开关sw2、功能开关sw3、强将开关sw4、a1多路阀开关sw5、a2多路阀开关sw6、a3多路阀sw7、a4多路阀开关sw8、b1多路阀开关sw9、b2多路阀开关sw10、b3多路阀开关sw11、b4多路阀开关sw12、芯片u23、芯片u8和芯片u22;
14、芯片u23的1脚连接有电阻r83的一端和电容c60的一端,芯片u23的2脚连接有电阻r83的另一端、电容c60的另一端和电阻r82的一端,电阻r82的另一端连接有上升开关sw1的一端,上升开关sw1的另一端接地;
15、芯片u23的3脚连接有电阻r80的一端和电容c59的一端,芯片u23的4脚连接有电阻r80的另一端、电容c59的另一端和电阻r81的一端,电阻r81的另一端连接有下降开关sw2的一端,下降开关sw2的另一端接地;
16、芯片u23的5脚连接有电阻r78的一端和电容c58的一端,芯片u23的6脚连接有电阻r78的另一端、电容c58的另一端和电阻r79的一端,电阻r79的另一端连接有功能开关sw3的一端,功能开关sw3的另一端接地;
17、芯片u23的7脚连接有电阻r76的一端和电容c57的一端,芯片u23的8脚连接有电阻r76的另一端、电容c57的另一端和电阻r77的一端,电阻r77的另一端连接有强将开关sw4的一端,强将开关sw4的另一端接地;
18、芯片u23的16脚连接有电容c56的一端、单片机的85脚和电阻r75的一端,电阻r75的另一端连接有+3.3v电源,芯片u23的14脚连接有电容c61的一端、电阻r84的一端和单片机的86脚,电阻r84的另一端连接有+3.3v电源,电容c61的另一端与芯片u23的13脚连接,芯片u23的12脚连接有电容c62的一端、电阻r85的一端和单片机的87脚,电阻r85的另一端连接有+3.3v电源,电容c62的另一端与芯片u23的11脚连接,芯片u23的10脚连接有电容c63的一端、电阻r86的一端和单片机的88脚,电阻r86的另一端连接有+3.3v电源,电容c63的另一端与芯片u23的9脚连接,芯片u23的15脚、芯片u23的13脚、芯片u23的11脚和芯片u23的10脚连接有电容c56的另一端,并接地;
19、进一步地,芯片u22的1脚连接有电阻r71的一端和电容c52的一端,芯片u22的2脚连接有电阻r71的另一端、电容c52的另一端和电阻r70的一端,电阻r70的另一端连接有a1多路阀开关sw5的一端,a1多路阀开关sw5的另一端接地;
20、芯片u22的3脚连接有电阻r68的一端和电容c51的一端,芯片u22的4脚连接有电阻r68的另一端、电容c51的另一端和电阻r69的一端,电阻r69的另一端连接有a2多路阀开关sw6的一端,a2多路阀开关sw6的另一端接地;
21、芯片u22的5脚连接有电阻r66的一端和电容c50的一端,芯片u22的6脚连接有电阻r66的另一端、电容c50的另一端和电阻r67的一端,电阻r67的另一端连接有a3多路阀开关sw7的一端,a3多路阀开关sw7的另一端接地;
22、芯片u22的7脚连接有电阻r64的一端和电容c49的一端,芯片u22的8脚连接有电阻r64的另一端、电容c49的另一端和电阻r65的一端,电阻r65的另一端连接有a4多路阀开关sw8的一端,a4多路阀开关sw8的另一端接地;
23、芯片u22的16脚连接有电容c48的一端、单片机的55脚和电阻r63的一端,电阻r63的另一端连接有+3.3v电源,芯片u22的14脚连接有电容c53的一端、电阻r72的一端和单片机的56脚,电阻r72的另一端连接有+3.3v电源,电容c53的另一端与芯片u22的13脚连接,芯片u22的12脚连接有电容c54的一端、电阻r73的一端和单片机的57脚,电阻r73的另一端连接有+3.3v电源,电容c54的另一端与芯片u22的11脚连接,芯片u22的10脚连接有电容c55的一端、电阻r74的一端和单片机的58脚,电阻r74的另一端连接有+3.3v电源,电容c55的另一端与芯片u22的9脚连接,芯片u22的15脚、芯片u22的13脚、芯片u22的11脚和芯片u22的10脚连接有电容c48的另一端,并接地;
24、芯片u8的1脚连接有电阻r29的一端和电容c27的一端,芯片u8的2脚连接有电阻r29的另一端、电容c27的另一端和电阻r30的一端,电阻r30的另一端连接有b1多路阀开关sw9的一端,b1多路阀开关sw9的另一端接地;
25、芯片u8的3脚连接有电阻r32的一端和电容c28的一端,芯片u8的4脚连接有电阻r32的另一端、电容c28的另一端和电阻r31的一端,电阻r31的另一端连接有b2多路阀开关sw10的一端,b2多路阀开关sw10的另一端接地;
26、芯片u8的5脚连接有电阻r34的一端和电容c29的一端,芯片u8的6脚连接有电阻r34的另一端、电容c29的另一端和电阻r33的一端,电阻r33的另一端连接有b3多路阀开关sw11的一端,b3多路阀开关sw11的另一端接地;
27、芯片u8的7脚连接有电阻r36的一端和电容c30的一端,芯片u8的8脚连接有电阻r36的另一端、电容c30的另一端和电阻r35的一端,电阻r35的另一端连接有b4多路阀开关sw12的一端,b4多路阀开关sw12的另一端接地;
28、芯片u8的16脚连接有电容c31的一端、单片机的59脚和电阻r37的一端,电阻r37的另一端连接有+3.3v电源,芯片u8的14脚连接有电容c32的一端、电阻r38的一端和单片机的60脚,电阻r38的另一端连接有+3.3v电源,电容c32的另一端与芯片u8的13脚连接,芯片u8的12脚连接有电容c33的一端、电阻r39的一端和单片机的561脚,电阻r39的另一端连接有+3.3v电源,电容c33的另一端与芯片u8的11脚连接,芯片u8的10脚连接有电容c34的一端、电阻r40的一端和单片机的62脚,电阻r40的另一端连接有+3.3v电源,电容c34的另一端与芯片u8的9脚连接,芯片u8的15脚、芯片u8的13脚、芯片u8的11脚和芯片u8的10脚连接有电容c31的另一端,并接地。
29、进一步地,所述电磁阀输出电路包括芯片u3、芯片u4、芯片u5、芯片u6、芯片u17、芯片u16、芯片u15、芯片u13、芯片u21、芯片u20、芯片u19和芯片u18,芯片u3;
30、芯片u3的1脚与二极管d4的正极相连,并连接有vcc电源,二极管d4的负极连接有芯片u3的8脚和电容c15的一端,芯片u3的7脚连接有二极管d8的负极和电阻r9的一端,二极管d8的正极和电阻r9的另一端连接有场效应管q1的栅极,场效应管q1的漏极连接有电源vcc1, 场效应管q1的源极与电容c15的另一端相连,芯片u3的2脚和芯片u3的3脚与单片机的97脚相连,此路发出a1路多路阀动作信号,使第一悬挂伸出;
31、芯片u4的1脚与二极管d5的正极相连,并连接有vcc电源,二极管d5的负极连接有芯片u4的8脚和电容c16的一端,芯片u4的7脚连接有二极管d9的负极和电阻r10的一端,二极管d9的正极和电阻r10的另一端连接有场效应管q2的栅极,场效应管q2的漏极连接有电源vcc1, 场效应管q2的源极与电容c16的另一端相连,芯片u4的2脚和芯片u4的3脚与单片机的98脚相连,此路发出b1路多路阀动作信号,使第一悬挂收缩;
32、芯片u5的1脚与二极管d6的正极相连,并连接有vcc电源,二极管d6的负极连接有芯片u5的8脚和电容c17的一端,芯片u4的7脚连接有二极管d10的负极和电阻r11的一端,二极管d10的正极和电阻r11的另一端连接有场效应管q3的栅极,场效应管q3的漏极连接有电源vcc1, 场效应管q3的源极与电容c17的另一端相连,芯片u5的2脚和芯片u5的3脚与单片机的1脚相连,此路发出a2路多路阀动作信号,使第二悬挂伸出;
33、芯片u6的1脚与二极管d7的正极相连,并连接有vcc电源,二极管d7的负极连接有芯片u5的8脚和电容c18的一端,芯片u4的7脚连接有二极管d11的负极和电阻r12的一端,二极管d11的正极和电阻r12的另一端连接有场效应管q4的栅极,场效应管q4的漏极连接有电源vcc1, 场效应管q3的源极与电容c18的另一端相连,芯片u5的2脚和芯片u5的3脚与单片机的2脚相连,此路发出b2路多路阀动作信号,使对应的电磁阀通电,使第二悬挂收缩;
34、芯片u3的4脚、芯片u4的4脚、芯片u5的4脚和芯片u6的4脚相连接,并接地;
35、芯片u17的1脚与二极管d24的正极相连,并连接有vcc电源,二极管d24的负极连接有芯片u4的8脚和电容c43的一端,芯片u17的7脚连接有二极管d20的负极和电阻r58的一端,二极管d20的正极和电阻r58的另一端连接有场效应管q10的栅极,场效应管q10的漏极连接有电源vcc1, 场效应管q10的源极与电容c43的另一端相连,芯片u17的2脚和芯片u17的3脚与单片机的3脚相连,此路发出a3路多路阀动作信号,使对应的电磁阀通电,使第三悬挂伸出;
36、芯片u16的1脚与二极管d23的正极相连,并连接有vcc电源,二极管d23的负极连接有芯片u16的8脚和电容c42的一端,芯片u16的7脚连接有二极管d19的负极和电阻r57的一端,二极管d19的正极和电阻r57的另一端连接有场效应管q9的栅极,场效应管q9的漏极连接有电源vcc1, 场效应管q9的源极与电容c42的另一端相连,芯片u16的2脚和芯片u16的3脚与单片机的4脚相连,此路发出b3路多路阀动作信号,使对应的电磁阀通电,使第三悬挂收缩;
37、芯片u15的1脚与二极管d22的正极相连,并连接有vcc电源,二极管d22的负极连接有芯片u15的8脚和电容c41的一端,芯片u15的7脚连接有二极管d18的负极和电阻r56的一端,二极管d18的正极和电阻r56的另一端连接有场效应管q8的栅极,场效应管q8的漏极连接有电源vcc1, 场效应管q8的源极与电容c41的另一端相连,芯片u15的2脚和芯片u15的3脚与单片机的5脚相连,此路发出a4路多路阀动作信号,使对应的电磁阀通电,使第四悬挂伸出;
38、芯片u13的1脚与二极管d21的正极相连,并连接有vcc电源,二极管d21的负极连接有芯片u13的8脚和电容c40的一端,芯片u13的7脚连接有二极管d17的负极和电阻r55的一端,二极管d17的正极和电阻r55的另一端连接有场效应管q7的栅极,场效应管q7的漏极连接有电源vcc1, 场效应管q7的源极与电容c40的另一端相连,芯片u13的2脚和芯片u13的3脚与单片机的38脚相连,此路发出b4路多路阀动作信号,使第四悬挂收缩;
39、芯片u17的4脚、芯片u16的4脚、芯片u15的4脚和芯片u13的4脚相连接,并接地;
40、芯片u21的1脚与二极管d32的正极相连,并连接有vcc电源,二极管d32的负极连接有芯片u21的8脚和电容c47的一端,芯片u21的7脚连接有二极管d28的负极和电阻r62的一端,二极管d28的正极和电阻r62的另一端连接有场效应管q14的栅极,场效应管q14的漏极连接有电源vcc1, 场效应管q14的源极与电容c47的另一端相连,芯片u21的2脚和芯片u21的3脚与单片机的39脚相连,此路发出四路悬挂提升动作信号,使四路悬挂提升;
41、芯片u20的1脚与二极管d31的正极相连,并连接有vcc电源,二极管d31的负极连接有芯片u20的8脚和电容c46的一端,芯片u20的7脚连接有二极管d27的负极和电阻r61的一端,二极管d27的正极和电阻r61的另一端连接有场效应管q13的栅极,场效应管q13的漏极连接有电源vcc1, 场效应管q13的源极与电容c46的另一端相连,芯片u20的2脚和芯片u20的3脚与单片机的40脚相连,此路发出四路悬挂下降动作信号,使四路悬挂下降;
42、芯片u19的1脚与二极管d30的正极相连,并连接有vcc电源,二极管d30的负极连接有芯片u19的8脚和电容c45的一端,芯片u19的7脚连接有二极管d26的负极和电阻r60的一端,二极管d26的正极和电阻r60的另一端连接有场效应管q12的栅极,场效应管q12的漏极连接有电源vcc1, 场效应管q12的源极与电容c45的另一端相连,芯片u19的2脚和芯片u19的3脚与单片机的41脚相连,此路发出四路悬挂强降动作信号,使四路悬挂强制下降;
43、芯片u18的1脚与二极管d29的正极相连,并连接有vcc电源,二极管d29的负极连接有芯片u18的8脚和电容c44的一端,芯片u18的7脚连接有二极管d25的负极和电阻r59的一端,二极管d25的正极和电阻r59的另一端连接有场效应管q11的栅极,场效应管q11的漏极连接有电源vcc1, 场效应管q11的源极与电容c44的另一端相连,芯片u18的2脚和芯片u18的3脚与单片机的42脚相连,此路信号用于备用;
44、芯片u21的4脚、芯片u20的4脚、芯片u19的4脚和芯片u18的4脚相连接,并接地。
45、本实用新型采用以上技术方案后,与现有技术相比,具有以下优点:
46、1. 所述tcu控制器和can控制器通过can收发电路与单片机通信,操控手柄通过模拟量输入电路和按键输入电路对悬挂机具发出控制指令,can控制器通过can地址对悬挂机具发出控制指令;所述单片机根据控制指令通过电磁阀输出电路发出动作指令,控制悬挂机具动作,实现了对悬挂机具的远程自动操控。
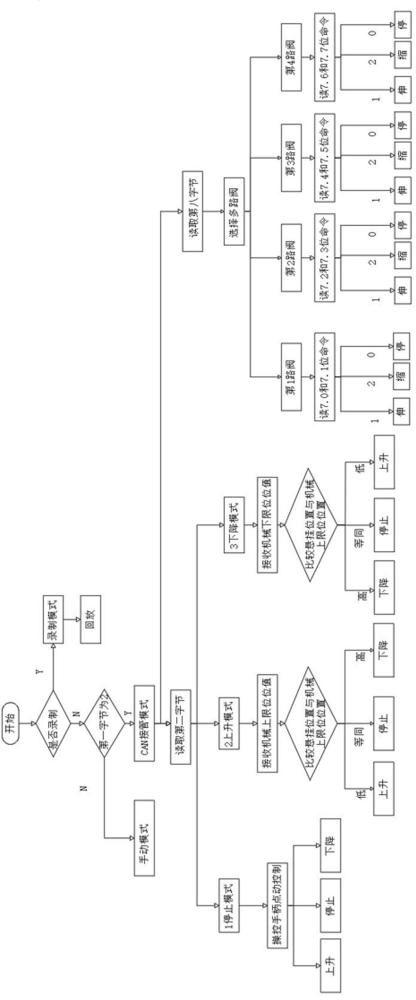
47、2.所述拖拉机悬挂机具电控装置的操控方法包括can接管模式和手动模式,在can接管模式下定义can地址0x18000117,对不同的字节定义不同的功能,终端设备发出控制指令,可以实现对悬挂机具上升下降以及伸缩进行远程自动控制,无需人工坐在驾驶证进行现场调节和控制。
48、3.在手动模式下,手动模式又包括自学习模式和正常模式,自学习模式包括悬挂角度传感器标定,根据悬挂机具在田间的工作位置确定悬挂机具的机械上限位,在自学习模式下进行标定,根据标定位置,拖拉机在工作时使悬挂机具位于机械下限位,调头或不工作时使悬挂机具位于机械上限位,设定一次极限位置后即可方便地将悬挂机具调整到预定位置,更加方便快捷,有助于实现自动化无人操作。
49、4. 上限位旋钮5和下限位旋钮17的最大极限位置分别对应悬挂机具的机械上限位和机械下限位,转动上限位旋钮5和下限位旋钮17可以在最大极限位置以内调节。
50、5.正常模式包括上升位置、停止位置和下降位置,通过转动模式旋钮1进行切换,操控手柄的模式旋钮1在上升位置或下降位置时,上升键18和下降键4按钮不起作用,在上升位置或下降位置时,悬挂机具可以迅速到达机械上限位位置或机械下限位位置,不用进行调节,快捷方便。
51、6.正常模式下,将操控手柄的模式旋钮1指针指到停止位置,tcu控制器不参与时,通过操控手柄操控悬挂机具。
52、7.tcu控制器参与时,通过定义can地址0x18000317实现对悬挂机具升降的控制,tcu控制器参与可以解决驾驶频繁操作面板从而降低驾驶员的劳动力,tcu控制器参与由于是根据实际路况调整悬挂机具的状态,可以使作业标准化,保护农机具,对减小后续作业的修正,能更好具有智能、科学的管理田间。
53、8.tcu控制器参与模式下,can地址0x18000317第四字节是4时,进入地头模式,悬挂机具先提升到预设高度,拖拉机开始掉头,tcu控制器检测到拖拉机掉头完成后悬挂机具再下降回机械下限位,地头模式完成,地头模式是在拖拉机到达田间地头时完成自动调头。
54、下面结合附图和实施例对本实用新型进行详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199060.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表