一种基于脉冲神经P系统的无人机三维航迹规划方法
- 国知局
- 2024-10-15 09:31:31
本发明以自然计算、控制理论等多学科领域理论与技术融合为基础,依据各项研究内容之间的密切联系,开展基于脉冲神经p系统的多策略灰狼优化算法的无人机三维航迹规划。
背景技术:
1、随着5g通信,ai算法技术不断突破,无人机新技术、新产品、新应用不断涌现,在航空物流、农林植保、地理测绘、管线巡检、智慧城市、通信中继等领域得到广泛应用。智能化使被控对象具有精确的感知、决策和行为执行能力,通过感知信息的融合,进行智能化分析、自主学习、决策与执行,并逐步具备自寻优能力。智能无人机可以用于复杂场景的勘探和测量。通过搭载高分辨率摄像头和多种传感器,无人机能够快速获取地形、地貌和矿层分布等数据,为勘测和测量开采提供精准的决策依据。同时,无人机还可以进行协助进行复杂空间的三维建模,帮助管理人员更好地了解环境,优化工作方案。同时,无人机在监测方面也具有显著优势。它可以利用红外热成像、气体探测等技术实时监测环境温度、湿度、有害气体浓度等关键指标,及时发现潜在的安全隐患。此外,无人机还可以进行设备的巡检,检查设备的运行状态,及时发现并处理故障,确保生产的连续性和稳定性。
2、膜计算源于自然计算,由罗马尼亚科学院院士gheorghepǎun于1998年提出。作为受细胞组织机理启发而产生的对计算模型研究的框架,膜计算在理论探索和应用研究方面取得了丰硕的研究成果,并将其优势逐渐伸到优化控制领域。基于膜计算模型,设计有效的膜算法,解决应用领域的优化控制问题,将膜结构和计算方法融合设计的优化算法,陆续求解了sat、可满足性、hpp、函数优化等问题,并进一步应用到机器人航迹规划及控制器优化问题。同时,将膜计算应用于无人机的航迹规划领域也逐渐成为当前研究的热点。
3、现有算法往往无法全面考虑飞行高度、风向、地形等复杂因素,导致规划出的航线与实际情况存在偏差,影响任务执行效率。另外在动态环境中,无人机需要实时调整飞行航迹以应对突发情况,主流算法在实时航迹规划方面仍存在不足,难以快速响应环境变化。
4、灰狼优化算法是一种启发式优化算法,具有全局搜索和高效性能的优点,已被广泛应用于多个领域。研究者们开始探索使用灰狼优化算法优化机器人路径规划,但该算法仍存在局部最优解和收敛速度慢等问题,需要通过改进来提高性能。
技术实现思路
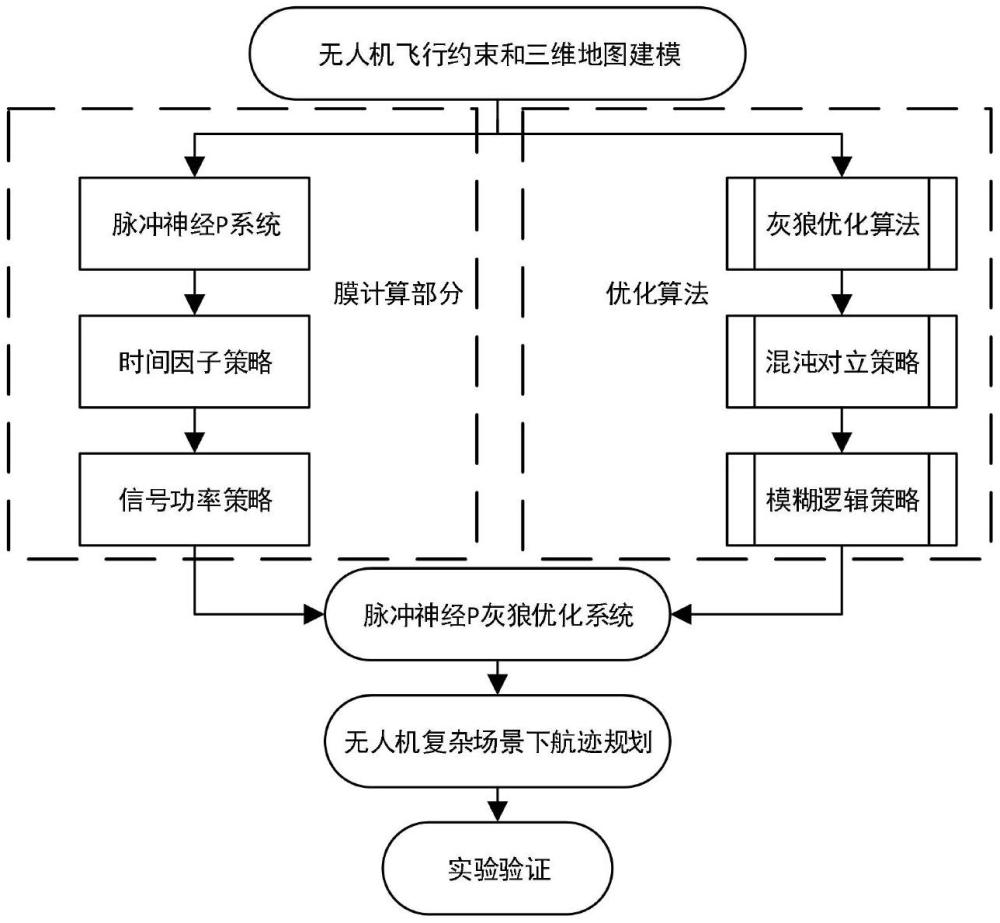
1、针对现有技术存在的不足,本发明的目的在于提出利用脉冲型p系统改进灰狼优化算法实现无人机三维航迹规划的研究,将膜计算的并行性特征与灰狼优化算法相结合,设计神经型p系统优化模型,达到无人机在复杂场景中高效规划飞行航迹的目标。
2、利用脉冲型神经p系统的并行特征来模拟灰狼优化器中的社会层次结构、跟踪、包围和攻击行为,通过一组脉冲型神经p系统之间的协作进行建模,在多项式时间内获得可行解,通过使用混沌逻辑映射、基于精英反对的学习来初始化灰狼优化算法的候选解,提高其性能。在该算法中,使用混沌地图生成初始化种群,而不是使用统一的位置,精英obl策略应用于这些位置并计算它们的相反解。这些方法避免了随机总体的缺点,提高了算法的收敛性。在灰狼优化算法中引入模糊分层算子,灵感来源于灰狼的分层金字塔。使用模糊逻辑来动态适应领先狼在整个迭代中应有的权重,使得gwo算法具有更好的搜索能力,在勘探和开发之间进一步增加平衡,为达到上述目的,本发明提出如下技术方案。
3、所述一种基于脉冲神经p系统的无人机航迹规划方法,所述航迹规划方法包括:
4、步骤1:设定山地环境地图大小,对实际山地飞行障碍建模;
5、步骤2:根据完整航迹所需要考虑的航迹长度代价、高度代价、平滑度代价综合考虑飞机耗能;
6、步骤3:建立相应代价函数,将航迹寻优问题转化为求解代价函数最小化问题;
7、步骤4:初始化灰狼优化算法参数:设置灰狼的数量、灰狼位置上下界;
8、步骤5:利用混沌逻辑映射、使用混沌地图初始化种群;
9、步骤6:基于对立的学习obl,对种群再次优化;
10、步骤7:引入模糊分层算子确定每只狼在算法更新迭代中的占比;
11、步骤8:使用脉冲神经p灰狼优化系统用来模拟灰狼群的社会等级和狩猎行为;
12、步骤9:重新更新所有灰狼的适应度,根据适应度的比较,更新α、β、δ狼的适应度和位置;
13、步骤10:对算法的迭代次数进行判断,如果达到最大迭代次数,停止计算并保存最短可行航迹,如果没有达到最大迭代次数,继续进行迭代寻优计算;
14、步骤11:检查地图是否完全覆盖,如果完全覆盖,则终止算法,根据最优解的位置,生成全覆盖航迹规划的最优航迹,否则,返回步骤9,继续进行迭代寻优计算。
15、本发明基于p系统分布式和高并行性特征和灰狼优化算法精度高收敛速度快优点构建脉冲神经p灰狼优化系统模型,围绕无人机在复杂环境下躲避障碍物和规划航迹的关键技术问题,对无人机飞行区域的约束指标进行建模,设计基于膜计算的改进灰狼优化算法,实现无人机在复杂环境高效规划航迹的可行性。
16、有益效果:本申请相较于传统的灰狼优化算法,在无人机三维航迹规划问题中,具有更快的收敛速度、更好的自适应性和更高的精度;传统的灰狼优化算法在此类问题中容易陷入局部最优,导致规划时间较长,甚至出现割草重复等问题,而本申请引入了混沌映射,通过混沌扰动和选择性反对调节因子,使得新算法生成具有随机性和多样性的数值序列,本申请通过调整权重系数或与其他算子进行组合,生成新的灰狼位置,具有强大的随机性和扰动性。
技术特征:1.一种基于脉冲神经p系统的无人机三维航迹规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于脉冲神经p系统的无人机三维航迹规划方法所述步骤一,对障碍建模的具体方法包括:
3.根据权利要求1所述的基于脉冲神经p系统的无人机三维航迹规划方法所述步骤二,对航迹飞行代价建模的具体方法包括:
4.根据权利要求1所述基于脉冲神经p系统的无人机三维航迹规划方法所述步骤三,其特征在于,其具体步骤包括:
5.根据权利要求1所述的一种基于脉冲神经p系统的无人机三维航迹规划方法所述步骤四,其特征在于,一个度m≥1的脉冲神经p系统可以表示为以下结构:
技术总结本发明公开了一种基于脉冲神经P系统的无人机三维航迹规划方法,以四旋翼无人机作为载体,针对无人机在复杂环境下难以获得或接近最佳的飞行路线的困难问题,提出利用脉冲型P系统改进灰狼优化算法实现无人机三维航迹规划,结合无人机现实的飞行环境及飞行约束,构建无人机三维飞行地图模型,将膜计算的非确定性和最大并行性特征与灰狼优化算法收敛速度快,精度高的优点相结合,设计神经型P系统与灰狼算法相结合的优化模型,达到无人机在复杂场景中高效规划飞行航迹的目标。技术研发人员:许家昌,倪龙受保护的技术使用者:安徽理工大学技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/314440.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表