一种基于城市风的无人机航迹预测方法
- 国知局
- 2024-08-08 16:55:27
本发明涉及无人机航迹规划,具体为一种基于城市风的无人机航迹预测方法。
背景技术:
1、小型无人机的重要安全问题之一是在恶劣天气条件下的安全操作,特别是在强风和湍流环境下;由于体积小,巡航速度慢,续航能力有限,无人机比载人商业航空运输工具更容易受到风环境的影响;为了提高无人机在空中作业的安全性,需要开发一种能够评估无人机在实际风场下飞行风险的系统;利用该飞行风险预测系统提供的信息,还可以在给定风环境下提前规划安全飞行轨迹。
2、开发复杂风环境下的无人机飞行风险预测系统的一个重要技术关键是对未来飞行区域内风环境数据的准确预测,当前基于数值模拟的风环境预测方法的研究众多;pengfei ju[1]等人从边界条件,建筑模型,计算域,计算网格和湍流模型等方面总结了cfd计算流体动力学技术预测城市风环境特性的进展与经验,但传统cfd建模方法的高计算成本是研究人员面临的一大挑战,同时cfd模拟的结果对用户必须设置的计算参数十分敏感[2],其准确性和可靠性令人担忧;xiaoyue xu[3]等人综述了几种快速简化的数值模拟方法,包括pmm,mm,ffd来模拟城市气流环境,主要讨论了以上几种方法的时间成本及验证,并通过ffd实现了新颖的方程求解方案,获得了比传统cfd方法快15-61倍的收益,然而以上几种方法在快速城市气流的模拟预测中的应用依然较少,如其中现有mm模型的应用是基于python和fortran的自编译代码模型,标记建筑墙和砌块的过程很复杂,其他研究团队难以实现;shahin masoumi-verki[4]等人运用基于机器学习算法的irom和nirom作为cfd的替代品,以克服其不能用于多查询和实时预测流量厂及浓度的问题,而也有解释说其使用的线性降维技术(如pod)会导致模型效率低下,特别是在处理平流主导问题时;因此,可以使用更高级的方法降低此类复杂系统的维数,在这些方法中,lstm与cnn已成功应用于流体动力学问题;使用cnn,可以防止从未来时间步长泄漏到前一个时间步长的信息,因为它只对前一层当前时间步之前的数据进行操作;将cnn与lstm进行比较,在各种任务和数据集中进行序列建模,发现前者比后者具有更长的有效记忆长度[5];近来,在风电相关的预测问题上,递归神经网络(rnn),长短期记忆网络(lstm),双向门控循环单元(bigru)这些深度学习模型广受青睐;其中,lstm在一定程度上解决了梯度消失的问题;然而,它仍然在处理长序列信息时遇到困难,导致信息衰减等问题;此外,风电数据表现出高度的自相关和较强的时间序列特征,导致预测滞后显著[6]。
3、同时,无人机航迹规划也是一项技术关键,它决定着无人机是否能安全且高效地通过有风环境;近年来,智能优化算法因具有高并行性、强鲁棒性、自组织自学习等特点,被广泛应用于复杂环境下的无人机自主航迹规划问题[7];其规划效果各有差异,有学者针对数种典型智能优化算法的特性与不足,总结出对应的改进策略,如蚁群算法,粒子群算法,遗传算法等,这些改进策略大大提高了智能算法的规划效益,同时也为无人机航迹规划提供了算法选择的更多可能性[8];而智能优化算法是一类结果型算法,在复杂环境下运算量大、易陷入局部最优、难以把握搜索和收敛的平衡;因此,未来在基于智能优化算法的无人机自主航迹规划方法研究中,同时也要注重使用新的智能优化算法,因为这些算法与经典智能优化算法相比,融合并优化了更多改进策略,易于实现且效率更高;沙猫群优化算法(scso)是于2022年被amir seyyedabbasi&farzad kiani[9]提出的一种新颖的元启发算法,其灵感来自沙猫的特殊功能,即检测低频噪声的能力;此算法与其他智能优化算法相比,能够摆脱局部最优陷阱,并且在开发阶段和探索阶段之间具有合适且平衡的行为,其具有更少的参数和运算符,且更容易实现。
4、综上所述,目前存在的一些问题如下:
5、1、单一预测模型比如单独使用cnn或者gru预测模型,预测能力较差;
6、2、原始沙猫群算法搜索范围有限,在搜索到局部最优时多样性较差,无法做到全局最优解确定,需做出改进;
7、3、无法根据风速数据准确画出禁飞区。
8、以下为现有技术中对应的参考文献,以辅助理解;
9、[1]ju p,li m,wang j.review of research advances in cfd techniques forthe simulation of urban wind environments[j].fluid dynamics&materialsprocessing,2022,18(2):449-462;
10、[2]bert j.e.blocken.50years of computational wind engineering:past,present and future[j].journal of wind engineering and industrialaerodynamics,2014,129:69-102;
11、[3]xiaoyue xu,zhi gao,mingjie zhang.a review of simplified numericalapproaches for fast urban airflow simulation[j].building and environment,2023,234(15),100200;
12、[4]shahin masoumi-verki,fariborz haghighat,ursula eicker.a review ofadvances towards efficient reduced-order models(rom)for predicting urbanairflow and pollutant dispersion[j].building and environment,2022,261(15):108966;
13、[5]s.bai,j.z.kolter,v.koltun.an empirical evaluation of genericconvolutional and recurrent networks for sequence modeling2018,[j].arxiv:1803.01271[cs.lg];
14、[6]bin wang,wei chengwei,lirong xie,hongyin bao,jieqiong zhang,maimaitireyimu abulizi.wind power forecasting based on wind speed errorcorretion and alo-lssvm[j].acta energiae solaris sin,2022,43(1):58-63;
15、[7]zhao yj,zheng z,liu y.survey on computational-intelligence-baseduav path planning[j].knowledge-based systems,2018,158:54-64;
16、[8]郭启敏,张鹏,王应洋,王石.无人机自主航迹规划智能算法综述[j].航空兵器.2023,30(03);
17、[9]seyyedabbasi a,kiani f.sand cat swarm optimization:a nature-inspired algorithm to solve global optimization problems[j].engineering withcomputers,2022:1-25。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于城市风的无人机航迹预测方法,通过将城市三维空间网立体格化,并通过使用每个栅格有关风数据,对其进行处理,使用lscso-cnn-bigru-attention模型预测未来三个小时的平均风速,以此来设置该栅格是否为禁飞区域,并导入城市建筑物等数据,建立单目标整数规划模型,使用lscso算法求解单目标整数规划模型,最终得到无人机航迹,解决了背景技术中提出的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
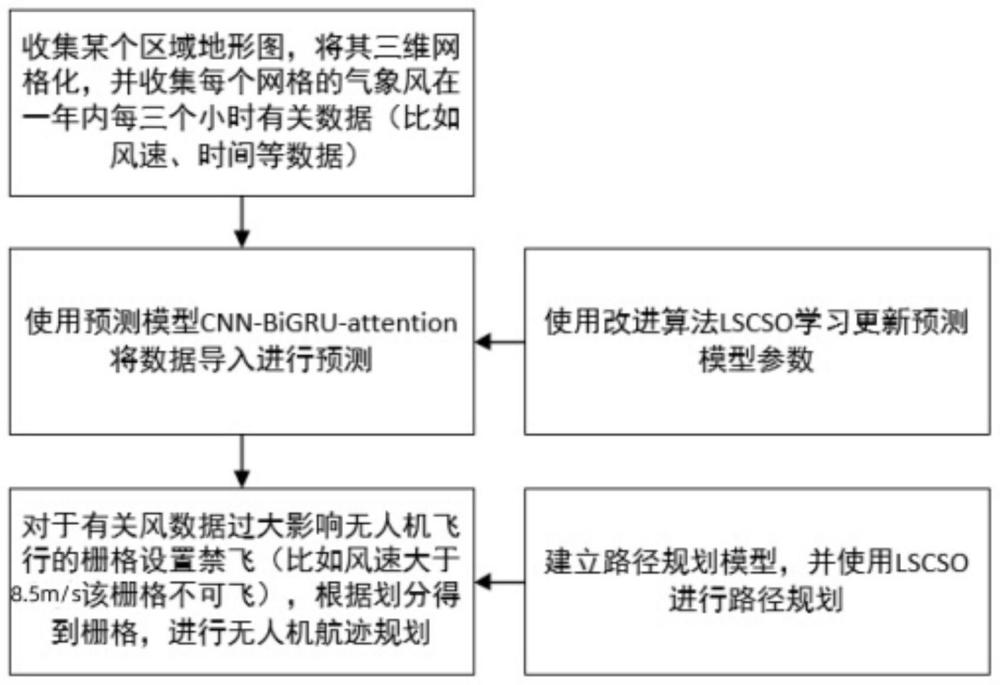
5、一种基于城市风的无人机航迹预测方法,包括如下步骤:
6、s1、导入任一区域的三维地形图,将其三维网格化,并收集每个网格一年内每三个小时的气象数据,且气象数据至少包括平均风速和温度;
7、s2、采用多策略改进沙猫算法、优化基于注意力机制的卷积神经网络和双向门控循环单元得到lscso-cnn-bigru-attention预测模型,并对每个网格未来三个小时平均风速进行预测;
8、s3、预测得到每个网格的平均风速预测值,并将每个网格的平均风速预测值与预设的风速阈值进行对比;若是平均风速预测值超过风速阈值时,则表示该区域不可飞,以此设置禁飞区域,通过建立起单目标整数规划模型,确立航迹规划中的最小路径,使用多策略改进的沙猫算法求解该单目标整数规划模型;
9、s4、采用lscso算法求解单目标整数规划模型,在受到气象风影响条件下,得出三维场景下无人机的最短航迹。
10、进一步的,将收集到的气象数据进行处理,得到数据格式为:第一列为时间,第二列为温度,第三列为平均风速,同时对时间进行标注,即0~3时间段标注为1,3~6时间段标注为2,6~9时间段标注为3,…,21~24时间段标注为8,n~n+3时间段标注为(n+3)/3。
11、进一步的,双向门控循环单元即bigru,且gru为门控循环单元,由更新门和重置门组成;
12、其中,更新门zt控制ht-1以及xt的量流入ht中,且更新门捕捉时间序列里的长期依赖关系,其公式如下:
13、zt=σ(wz·[ht-1,xt]+bz)(17)
14、式(17)中,σ为sigmoid激活函;wz,bz为更新门参数;xt为当前时刻t的隐藏状态输入;
15、
16、式(18)中,ht为当前时刻t的隐藏状态输出;ht-1为前一时刻t-1的隐藏状态输出,重置门rt控制ht-1以及xt的量流入中,且重置门捕捉时间序列里的短期依赖关系,其公式如下:
17、rt=σ(wr·[ht,xt]+br)(19)
18、式(19)中,σ为sigmoid激活函;wr,br为重置门参数;xt为当前时刻t的隐藏状态输入;
19、
20、式(20)中,为当前时刻t的候选隐藏状态。
21、进一步的,bigru模型是循环神经网络,由两个独立的gru单元组成,一个按照时间序列正向处理数据,另一个按照时间序列的逆向处理数据,且bigru模型同时捕捉序列数据的前向和后向信息,bigru由以下公式定义:
22、
23、式(21)中,gru()函数表示对输入时间数据的非线性变换,xt为输入,为正向隐层状态输出,为反向隐层状态输出,wt表示t时刻正向隐层状态所对应的权重,vt表示反向隐层状态所对应的权重,bt表示t时刻bigru隐层状态所对应的偏值。
24、进一步的,attention模型来源于人类视觉的信号处理机制,且attention模型即注意力模型,将使用不同特征的动量数据来确定对其预测结果的影响大小,attention由以下公式定义:
25、
26、式(22)中,ht为bigru层输出,wt为权重矩阵,α为attention层的输出。
27、进一步的,lscso算法即融合改进混沌映射,自适应权重和三角游走策略的沙猫群优化算法,获取过程如下:
28、s201、设置种群数量n,最大迭代次数同时,已知解的范围[lb,ub],解的数量d;
29、s202、沙猫群种群初始化,利用改进sine混沌映射初始化沙猫群算法个体x,所依据的公式如下:
30、
31、式(1)中,sandcati为沙猫群的种群矩阵,xi为第i个沙猫群的种群位置,xi,j为第i个沙猫种群的第j维的位置,n是沙猫群的种群数量,d是沙猫群的种群维度;
32、
33、式(2)中,ai和bi的初始值取值范围为(0,1),控制参数k假定为1200,sinei+1为迭代混沌序列值,%为取余数运算;
34、
35、
36、式(3)中,fitness为沙猫群种群的目标向量,fi为第i个沙猫群种群的目标函数值;
37、s203、搜索猎物;
38、s204、攻击猎物。
39、进一步的,在s203中包括如下步骤:
40、s2031、引入自适应权重;
41、
42、式(4)中,w为自适应权重,wmin为权重最小值,wmax为权重最大值;
43、s2032、更新沙猫群个体的位置;
44、
45、式(5)中,为沙猫群常规灵敏度值,sm为沙猫群中个体灵敏度最大值,iterc为当前迭代次数,itermax为最大迭代数值;
46、
47、式(6)中,为沙猫群中个体的灵敏度范围,用于导引参数以实现阶段间的转换;
48、
49、式(7)中,为搜索勘探和攻击利用阶段之间过渡的参数;
50、
51、式(8)中,每个搜索代理,即沙猫根据最优候选位置当前位置以及
52、每只沙猫的灵敏度更新自己的位置
53、s2033、使用三角游走策略再次更新位置;
54、l1=posbc(t)-posc(t)(9)
55、
56、β=2×pi×rand(0,1)(11)
57、p=l12+l22-2×l1×l2×cos(β)(12)
58、posnew=posb(t)+r×p(13)
59、式(9)中,l1为沙猫和猎物之间的距离;式(10)中,为沙猫游走的步长范围;式(11)中,β为运动方向;式(13)中,posnew为游走获得的位置。
60、进一步的,在s204中包括如下步骤:
61、s2041、利用轮盘赌选择法获得沙猫个体的运动方向;
62、假设沙猫的灵敏度范围为一个圆,这样在圆圈上的运动方向由轮盘赌选择法计算得到的角度(α)决定;
63、α=roulettewheelselection(θ) (14)
64、式(14)中,θ为随机角度,范围为(1,360);
65、
66、式15)为轮盘赌选择法,p(xi)为每个个体被选中的概率,q(xi)为每个个体累积的被选中概率;
67、s2042、更新沙猫群个体的位置;
68、
69、式(16)中,为随机位置,为当前位置,为最佳位置。
70、进一步的,lscso-cnn-bigru-attention组合预测模型的建立过程如下:
71、第一步,输入收集到的原始数据,且原始数据为气象数据;
72、第二步,划分测试集与训练集,前70%为测试集,后30%为训练集;
73、第三步,对数据进行归一化处理;
74、第四步,并对数据维度进行转换,使其满足conv1d要求的输入格式;
75、第五步,使用cnn进行数据特征的提取,由conv1d提取数据的局部特征,补零策略为same,内核大小为4,选用最大值池化,池化大小为2,步长为1,激活函数为指数线性单元,即relu;使用bigru正反两个方向对数据特征进行提取,激活函数为adam算法;
76、第六步,引入attention机制对提取到的特征分配不同的权重;
77、第七步,使用lscso算法优化cnn-bigru-attention参数,将学习率、cnn卷积核个数、gru神经元个数和注意力机制的键值作为lscso中对应的解进行网络评价,在优化中将学习率的搜索范围定义在[0.001,0.01],cnn卷积的搜索范围定义在[10,30],bigru神经元个数的搜索范围定义在[10,30],注意力机制的键值的搜索范围定义在[2,50]:设置lscso初始种群和最大迭代次数,目标函数为网络学习中的平均百分比误差mape,公式如下:
78、
79、式中,为每个网格在测试集所对应的时间经预测得到的值,yi为每个网格在测试集所对应的时间的实际值,n为测试集的个数;
80、第八步,得到每个网格未来3个小时的预测结果。
81、进一步的,单目标整数规划模型的建立如下:
82、将已识别出禁飞区域作为限制区的平面地图数据,按照等分平面的划分方法进行三维立体网格化,总共n个栅格;其中,minf(x)为目标函数,n为立体地图数据网格化后的栅格数量,为节点为节点为决策变量,表示无人机是否依次途径节点和若依次途径节点和则若不依次途径节点和则d表示栅格长度,即节点和之间的距离,为固定值;
83、路径与节点之间的网络流约束为下式所示:
84、
85、其中,表示无人机的航迹只能经过相邻的节点时;
86、表示无人机的可达节点必须是可行飞行区域;
87、表示无人机可达节点禁飞区之间的距离大于其危险阈值;
88、
89、表示无人机经过相邻节点的到达时间关系;
90、表示无人机在规定时间内通过该空域;
91、表示决策变量的范围;
92、其中,决策变量,表示无人机是否依次途径节点和若依次途径节点和则若不依次途径节点和则无人机路径的起点;无人机路径的终点;d:栅格长度,即节点和之间的距离,为固定值;若任意两个栅格的节点和相邻,则它们之间的因果系数否则每个栅格点航线开始的时间;每个栅格点航线结束的时间;航线在每个栅格点的运行时间;通达状态,存在限制区或障碍物否则d:与限制区之间的安全距离。
93、(三)有益效果
94、本发明提供了一种基于城市风的无人机航迹预测方法,具备以下有益效果:
95、1、本发明采用设计的lscso-cnn-bigru-attention模型,预测未来三个小时的平均风速,以此来设置该栅格是否为禁飞区域,相较于传统单一类型模型,本发明使用lscso优化cnn-bigru-attention模型参数学习率、cnn卷积核个数、gru神经元个数和注意力机制的键值,提高其预测能力;
96、2、本发明针对沙猫群优化算法的特性,从种群结构初始化,最优解更新策略方面进一步改进,即融合改进混沌映射,自适应权重和三角游走策略的沙猫群优化算法,提高了沙猫群的全局游走搜索能力,避免陷入全局最优解,提出了基于改进沙猫群算法的创新性航迹规划方法;
97、3、本发明对平均风速>8.5m/s的栅格,设置为禁飞栅格,并建立单目标整数规划模型,使用多策略改进的沙猫群优化算法求解,从而达到根据风速数据即可准确画出禁飞区的效果。
本文地址:https://www.jishuxx.com/zhuanli/20240808/271216.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。