一种复杂环境下使用的智能服务机器人
- 国知局
- 2024-08-08 16:54:24
本发明涉及机器人,尤其涉及一种复杂环境下使用的智能服务机器人。
背景技术:
1、智能服务机器人是一种结合了人工智能技术和机器人技术的高科技产品,集机械、电子、材料、计算机、传感器、控制等多门学科于一体,旨在提供各种服务和支持。这些机器人具备感知、交互、学习和自主决策等功能,能够与人类进行自然语言交流、理解人类需求并做出相应响应,为人们提供便捷、高效的服务体验,智能服务机器人的应用范围广泛,包括但不限于家庭服务、医疗陪护、紧急救灾等多个领域,它们能基于视觉感知实现对特定物体的位姿估计,同时获取物体的形状、大小、位置等信息,为其后续操作提供信息保障,智能服务机器人的研究和应用是高科技实力和发展水平的重要标志;
2、在智能服务机器人的移动中,其避障功能至关重要,在复杂环境下,智能服务机器人系统的避障功能准确率不高,虽然现代技术在不断进步,但环境的复杂性和不确定性仍然给机器人的避障带来挑战,主要提现在以下几方面:
3、1、环境的不确定性:复杂环境可能存在各种不可预测的因素,如突然出现的障碍物、光线变化、地形起伏等,这可能导致机器人无法及时检测到障碍物或对其位置和形状做出准确判断;
4、2、传感器的局限性:机器人所使用的传感器在精度、范围和灵敏度等方面可能存在一定的局限性,例如,激光雷达可能受到干扰或反射,摄像头可能存在视角盲区,这些都可能影响机器人对环境的感知和避障决策;
5、3、机器人的运动特性:机器人的速度、加速度、转向能力等运动特性也会影响避障的效果,例如,高速运动的机器人可能需要更快速的反应和更精确的控制;
6、4、先验知识的缺乏:在某些情况下,机器人可能缺乏对环境的先验;
7、因此,本发明提出一种复杂环境下使用的智能服务机器人以解决现有技术中存在的问题。
技术实现思路
1、针对上述问题,本发明提出一种复杂环境下使用的智能服务机器人,该复杂环境下使用的智能服务机器人有利于应对各种不确定的环境。
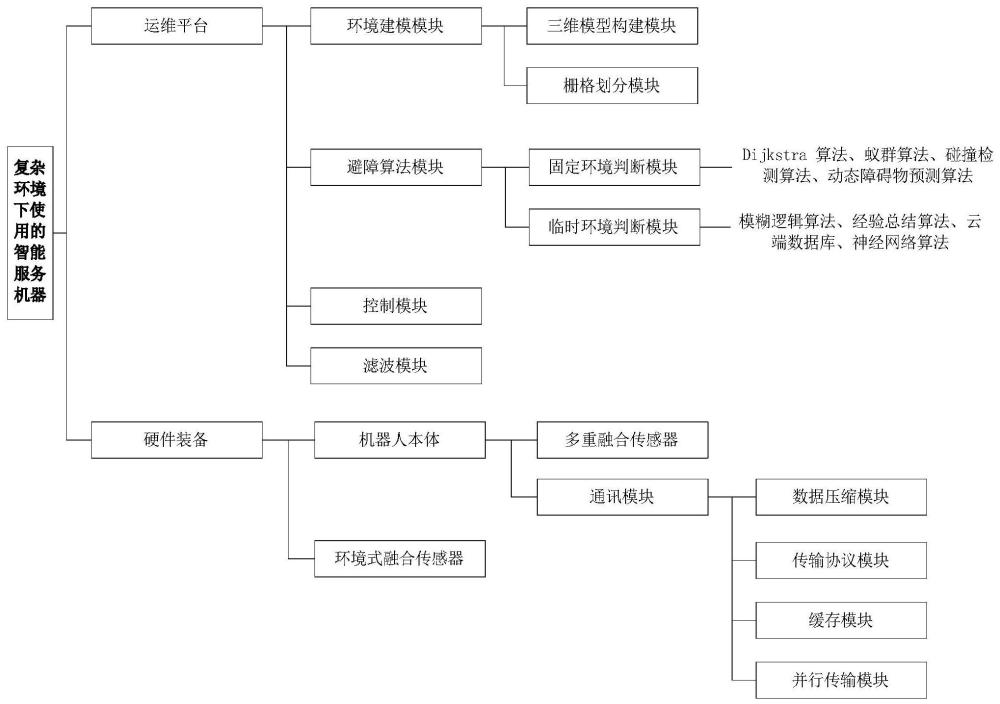
2、为实现本发明的目的,本发明通过以下技术方案实现:一种复杂环境下使用的智能服务机器人,包括运维平台和硬件装备,所述运维平台包括环境建模模块、避障算法模块,所述硬件装备包括机器人本体、环境式融合传感器,且机器人本体自带有多重融合传感器,所述机器人本体与运维平台无线通讯;
3、所述环境式融合传感器位于复杂环境中,用于采集环境的数据,包括静态数据和动态数据,所述多重融合传感器基于机器人本体的移动,实时采集周围的环境数据,所述环境建模模块基于环境式融合传感器的数据,构建固定式三维模型,基于多重融合传感器的数据,构建临时三维模型,所述避障算法模块根据机器人的定位,选择适配当前环境的避障算法,在对应固定式三维模型的环境中移动时,根据静态数据位置和动态数据规律,规划最优路径,并根据机器人本体的运动参数,实时探测突发动态障碍物并预测避障方案,在陌生环境中,以实时的临时三维模型作为分析蓝本,分析各种临时障碍物的属性,根据机器人本体的运动参数,实时探测并预测避障方案。
4、进一步改进在于:所述环境式融合传感器包括视觉传感器、超声波传感器、激光雷达,所述多种融合传感器包括定位传感器、视觉传感器、超声波传感器、激光雷达和毫米波雷达。
5、进一步改进在于:所述运维平台基于服务终端,所述机器人本体内置通讯模块,且通讯模块包括数据压缩模块、传输协议模块、缓存模块和并行传输模块,所述数据压缩模块用于对传输的数据进行压缩,所述传输协议模块用于匹配传输协议,和服务终端进行通讯,所述缓存模块用于对传输的数据进行缓存,所述并行传输模块用于将数据分割成若干个部分,同时进行传输。
6、进一步改进在于:所述环境建模模块包括三维模型构建模块和栅格划分模块,所述三维模型构建模块用于融合环境式融合传感器的数据,构建固定式三维模型,还用于融合多重融合传感器的数据,构建临时三维模型,融合采用融合算法,将不同传感器的数据进行互补,所述固定式三维模型和临时三维模型均包括机器人本体的运动参数,且运动参数包括速度、加速度和转向能力。
7、进一步改进在于:所述栅格划分模块用于将固定式三维模型和临时三维模型划分为栅格,每个栅格表示一个区域,所述机器人本体以每个栅格作为动态判断单元,通过判断栅格是否被障碍物占据来实时规划路径。
8、进一步改进在于:所述避障算法模块包括固定环境判断模块和临时环境判断模块,所述固定环境判断模块接入固定式三维模型,用于对静态数据和动态数据的模型进行判断,判断静态数据位置,判断动态数据运动规律,基于dijkstra算法、蚁群算法对机器人本体经过的路径进行规划,选择出最优路径以及次优备选路径。
9、进一步改进在于:所述固定环境判断模块还内置碰撞检测算法模块、动态障碍物预测算法模块,所述碰撞检测算法和动态障碍物预测算法相匹配用于辅助最优路径的执行,在机器人本体按照既定最优路径行走的时候,配合多重融合传感器,识别突发动态障碍物,碰撞检测算法模块实时分析机器人本体与突发动态障碍物之间的距离,动态障碍物预测算法模块基于机器人本体的运动参数,同步预测突发动态障碍物的运动轨迹,提前规划避障路径。
10、进一步改进在于:所述临时环境判断模块内置有模糊逻辑算法模块、经验总结算法模块、云端数据库、神经网络算法模块,所述云端数据库基于互联网,提供各种环境中常见障碍物种类的形状、位置和运动趋势参数,机器人本体在陌生环境中,基于多重融合传感器构建的临时三维模型,所述神经网络算法模块将临时三维模型中的参数上传至云端数据库,根据临时三维模型中障碍物的形状、位置和运动趋势,模拟思考,对比判断当前障碍物的所属种类,所述模糊逻辑算法模块通过人工定义模糊规则和隶属函数,来描述机器人本体与当前障碍物种类之间的预测关系,以此规划出避障方案,同步,所述临时环境判断模块接入碰撞检测算法模块、动态障碍物预测算法模块,配合多重融合传感器,实时分析机器人本体与突发动态障碍物之间的距离,并预测突发动态障碍物的运动轨迹,提前规划避障路径,与避障方案相互互补论证输出。
11、进一步改进在于:所述经验总结算法模块用于在陌生环境移动后,对当前的临时三维模型以及避障方案进行储存,利用机器学习算法对机器人本体整个过程中避障行为进行训练和优化,根据出现的误差以及错误判断对传感器以及算法进行校准,综合描述多种环境和机器人本体的状态,后续根据不同陌生环境参数的相似性,选择最优传感器参数以及算法匹配方案。
12、进一步改进在于:所述运维平台还包括控制模块和滤波模块,所述控制模块用于将避障算法模块输出的避障方案转换为控制指令,控制机器人本体的运动,所述滤波模块用于采用滤波算法对环境式融合传感器、多重融合传感器采集的数据进行处理,去除噪声和干扰。
13、本发明的有益效果为:
14、1、本发明可以适应不同的的环境,通过环境式融合传感器可以采集常用复杂环境的静态数据和动态数据,以此构建固定式三维模型,通过避障算法模块切换算法适配当前环境,根据静态数据位置和动态数据规律,规划最优路径,并根据机器人本体的运动参数,实时探测突发动态障碍物并预测避障方案,由此应对常用环境,陌生环境下,通过多重融合传感器的数据,构建临时三维模型,切换适配的算法后,分析各种临时障碍物的属性,配合机器人本体的运动参数,便于实时探测并预测避障方案,由此应对陌生环境,有利于应对各种不确定的环境。
15、2、本发明的环境式融合传感器包括视觉传感器、超声波传感器、激光雷达,多种融合传感器包括定位传感器、视觉传感器、超声波传感器、激光雷达和毫米波雷达,采用融合算法,将不同传感器的数据进行互补,使得传感器数据更加准确。
16、3、本发明的固定式三维模型和临时三维模型均包括机器人本体的运动参数,在规划路径和预测方案时,考虑机器人本体的运动参数,包括速度、加速度和转向能力,保证避障效果。
17、4、本发明在陌生环境中,神经网络算法模块将临时三维模型中的参数上传至云端数据库,根据障碍物的形状、位置和运动趋势,模拟思考,对比判断当前障碍物的所属种类,以此规划出避障方案,经验总结算法模块对此进行储存,利用机器学习算法对整个过程中避障行为进行训练和优化,由此对传感器以及算法进行校准,后续根据不同陌生环境参数的相似性,选择最优传感器参数以及算法匹配方案,由此,使得整体机器人具备学历能力,补充经验数据,避障更灵活。
18、5、本发明采用压缩数据、并行传输等方式传输数据指令,减少延迟,提高机器人本体的响应速率。
本文地址:https://www.jishuxx.com/zhuanli/20240808/271110.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。