一种基于插秧机导航数据的秧苗理论位置区域获取方法
- 国知局
- 2024-08-08 16:55:11
本发明涉及缺苗检测,特别涉及一种基于插秧机导航数据的秧苗理论位置区域获取方法。
背景技术:
1、在水稻机械化种植过程中,插秧机漏插以及插秧后的漂秧、死苗等均会导致缺苗情况的发生,从而降低土地利用率,减少粮食产量。因此,开展缺苗检测并根据需要及时进行补苗,对减少土地、水肥等资源浪费,提高粮食产量至关重要。目前常见的缺苗检测方法有光电传感器检测法和机器视觉检测法两种,其中光电传感器缺苗检测方法主要应用于育苗阶段,或移栽过程期间,主要在相应检测位置设置激光、光纤等光电传感器对穴盘、苗茎、苗筒等进行检测,通过分析有苗、缺苗两种情况下不同的光电信号,进行缺苗判定;机器视觉缺苗检测方法首先通过ccd或cmos图像摄取装置抓取秧苗图像,然后将抓取的图像传送至数字化处理单元进行处理,提取图像特征,根据图片颜色、像素分布等信息进行缺苗检测。然而,以上两种方法均无法直接准确获取缺苗位置所在的地理坐标,不利于后续精准补苗作业。
技术实现思路
1、本发明目的在于克服现有技术的缺点与不足,提供一种基于插秧机导航数据的秧苗理论位置区域获取方法;所述秧苗理论位置区域获取方法可以通过插秧机插秧作业时的导航数据并结合行距、株距等参数快速确定秧苗理论位置区域,为后期缺苗补苗提供数据支持。
2、本发明的目的通过以下技术方案实现:
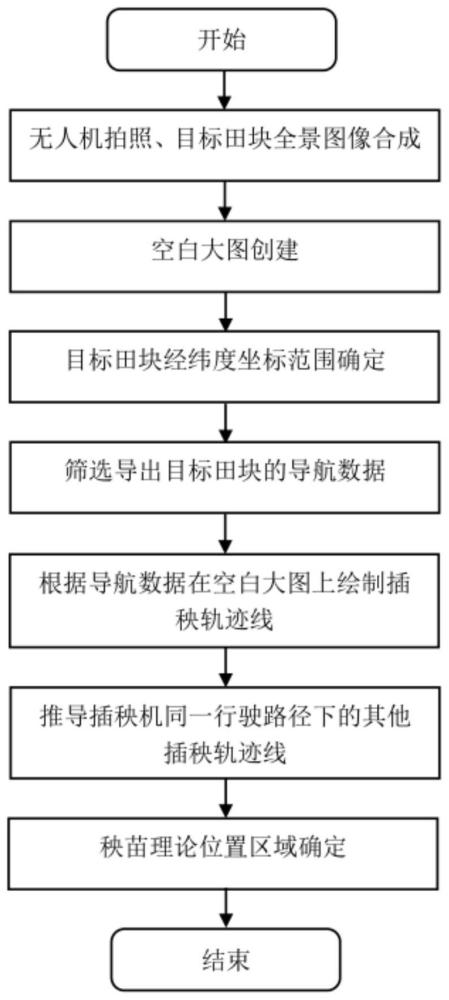
3、一种基于插秧机导航数据的秧苗理论位置区域获取方法,包括以下步骤:
4、s1、通过无人机拍照采集目标田块的低空图像,并将采集的多张目标田块的局部图像合成为目标田块全景图像;
5、s2、创建与得到的目标田块全景图像尺寸相同的空白大图;
6、s3、根据得到的目标田块全景图像,利用坐标变换的方式求得目标田块的经纬度坐标范围;
7、s4、导出插秧机导航控制器内存储的导航数据,并利用目标田块的经纬度坐标范围筛选出目标田块对应的作业记录点;
8、s5、将筛选出的目标田块的作业记录点按时间顺序绘制在空白大图上,得到一条插秧轨迹线;
9、s6、根据得到的插秧轨迹线推导出插秧机同一行驶路径下的其他插秧轨迹线;
10、s7、根据插秧株距确定每条插秧轨迹线上的秧苗理论位置区域。
11、优选的,所述的步骤s1包含以下步骤:
12、s11、采用安装有实时动态测量设备的无人机在固定高度位置采集目标田块图像;
13、s12、在图像采集过程中,无人机需要保证飞行高度固定,飞行路径覆盖整个目标田块,以此采集涵盖目标田块的所有区域的多张目标田块的局部图像;
14、s13、将采集到的所有的目标田块的局部图像导入制图软件进行合成,得到目标田块全景图像。
15、优选的,所述的步骤s2包含以下步骤:
16、s21、获取目标田块全景图像的尺寸大小;
17、s22、通过制图软件创建与目标田块全景图像尺寸相同的空白大图。
18、优选的,所述的步骤s3包含以下步骤:
19、s31、绘制完全包含目标田块全景图像的最小矩形框,并保证该矩形框为正北方向;
20、s32、获取绘制的矩形框的左上角和右下角两个顶点的像素坐标;
21、s33、根据像素坐标与地理坐标的转换公式,将得到的两个顶点的像素坐标转换为地理坐标,从而得到目标田块的经纬度范围。
22、优选的,所述的步骤s4包含以下步骤:
23、s41、将插秧机导航控制器内存储的导航数据导出为一个数据表,并获取数据表的总行数;
24、s42、新建一个空白数据表;
25、s43、借助for循环函数逐行对数据表中的数据进行经度和纬度范围判断,如果当前行数据的经度和纬度均在目标田块的经度和纬度范围内,则将该行数据写入空白数据表内;如果当前行数据的经度和纬度不在目标田块的经度和纬度范围内,则将该行数据舍弃,即不写入空白数据表内。
26、优选的,在步骤s43中,for循环函数的循环次数设定为步骤s41得到的数据表的总行数。
27、优选的,所述的步骤s5包含以下步骤:
28、s51、利用制图软件将步骤s43得到的目标田块的作业记录点逐个绘制在空白大图上,其中,所述作业记录点的宽度设置为1像素值;
29、s52、按导航记录时间的先后顺序将绘制的作业记录点用直线连起来,形成插秧轨迹线,其中,所述插秧轨迹线的宽度设置为1像素值;
30、s53、采用十六进制“#00ff00”绿色对步骤s51绘制的所有作业记录点进行填充;
31、s54、采用十六进制“#ff0000”红色对步骤s52绘制的所有插秧轨迹线进行填充。
32、优选的,所述的步骤s6包含以下步骤:
33、s61、根据已知的插秧机的作业记录点,推导插秧机同一行驶路径下的其他插秧轨迹线上的作业记录点的经纬度坐标;
34、s62、利用制图软件将推导得到的插秧机同一行驶路径下其他插秧轨迹线上的作业记录点逐个绘制在空白大图上,其中,所述作业记录点的宽度设置为1像素值;
35、s63、按照跟已知的插秧机导航数据点相同的顺序将绘制的作业记录点用直线连起来,形成插秧轨迹线,其中,所述插秧轨迹线的宽度设置为1像素值;
36、s64、采用十六进制“#00ff00”绿色对步骤s62绘制的所有作业记录点进行填充;
37、s65、采用十六进制“#ff0000”红色对步骤s63绘制的所有插秧轨迹线进行填充。
38、优选的,在步骤s61中,具体推导过程为:
39、(1)求得已知的插秧机作业记录点所在的纬度平面的半径r;
40、r=rcos(wm);
41、式中,r为地球的平均半径,wm为已知的插秧机作业记录点的纬度;
42、(2)求得已知的插秧机作业记录点和待求的插秧机作业记录点之间的经度差δj;
43、
44、式中,l为已知的插秧机作业记录点和待求的插秧机作业记录点之间的距离,α为插秧机行驶的方位角,即插秧机前进方向与正北方向的夹角;
45、(3)将求得的弧度δj转化为角度δj1;
46、
47、式中,π为圆周率;
48、(4)求得待求的插秧机作业记录点的经度jm1;
49、jm1=jm-δj1;
50、式中,jm为已知的插秧机作业记录点的经度;
51、(5)求得已知的插秧机作业记录点和待求的插秧机作业记录点之间的纬度差δw;
52、
53、(6)将求得的弧度δw转化为角度δw1;
54、
55、(7)求得待求的插秧机作业记录点的纬度wm1;
56、wm1=wm+δw1;
57、式中,wm为已知的插秧机作业记录点的纬度。
58、优选的,所述的步骤s7包含以下步骤:
59、s71、确定每条插秧轨迹线上的首个插秧作业点;
60、s72、以确定的首个插秧作业点作为起点,在插秧轨迹线上每隔一个固定的间距s取一个点作为秧苗理论位置,其中的间距s的大小等于插秧理论株距;
61、s73、以得到的每个秧苗理论位置为圆心,一定距离为半径的圆形区域就是每个秧苗的理论位置区域
62、本发明与现有技术相比具有以下有益效果:
63、1、本发明的基于插秧机导航数据的秧苗理论位置区域获取方法可以快速准确获取秧苗理论位置,为获取缺苗位置所在的地理坐标提供数据支持。
64、2、本发明的基于插秧机导航数据的秧苗理论位置区域获取方法可以通过插秧机插秧作业时的导航数据并结合行距、株距等参数快速确定秧苗理论位置区域。
本文地址:https://www.jishuxx.com/zhuanli/20240808/271198.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表