一种基于C-V2X的感知融合系统及方法与流程
- 国知局
- 2024-08-08 16:55:06
本技术涉及智能驾驶,具体涉及一种基于c-v2x的感知融合系统及方法。
背景技术:
1、v2x就是vehicle to everything的缩写,意为“车联万物”,顾名思义就是车与车之间、车与行人以及车与路边基础设施之间(比如交通灯、路灯等)、车与云端等进行信息交互,c是指蜂窝(cellular),它是基于3g/4g/5g等蜂窝网通信技术演进形成的车用无线通信技术,通过v2x直连通信和蜂窝网络双重通信技术可实现更远距离和更大范围的可靠通信。
2、当单车智能陷入发展瓶颈后,c-v2x技术为智能驾驶产业发展提供了新的思路。c-v2x将“人、车、路、云”等交通参与要素有机联系在一起,能够探测车辆感知能力外的信息、检测潜在的隐患、甚至提前预测路况信息,可以说为车辆配上了“千里眼”和“顺风耳”,实现整车“视觉”从百米到无限的延伸。简单的说就是,基于c-v2x技术的智驾系统支持路侧单元(road side unit,rsu)和车载单元(on board unit,obu)之间进行信息交互,路侧单元可以采集车载单元获取不到的道路交通数据,道路交通信息的共享可以降低智能驾驶车辆感知层的压力,在“聪明的车”与“智慧的路”双轮驱动下,c-v2x技术将持续推动智能驾驶产业发展。
3、当前存在的技术问题是,如何保证路侧单元输出的感知数据的可信度,以及车端如何基于路侧单元输出的感知数据和车载单元输出的感知数据进行数据融合处理,得到合理的智能驾驶决策,避免过于依赖自身的感知系统导致无法感知到自身感知系统感知能力外的数据,并且现有技术中为了保证车端感知系统的感知能力需要在车辆上安装各种传感器,大大增加了单车成本。
技术实现思路
1、本技术提供一种基于c-v2x的感知融合及方法,可以解决现有技术中存在的路侧单元的感知数据可靠性无法保证,且在车端缺乏合理策略对路侧感知数据和车端感知数据进行数据融合导致车辆智能驾驶水平受限和制造成本增加的技术问题。
2、第一方面,本技术实施例提供一种基于c-v2x的感知融合系统,所述系统包括相互联通的路侧单元和车载单元,路侧单元用于采集第一道路信息,车载单元用于采集第二道路信息,所述两种道路信息均包括道路事件感知信息和道路交通参与者感知信息,所述道路事件感知信息包括道路事件的第一相关信息,所述道路交通参与者感知信息包括道路交通参与者的第二相关信息;
3、所述路侧单元还用于从车载单元处获取第二道路信息,并根据第一道路信息和第二道路信息进行路侧单元的感知可信度计算,得到可信度数据;
4、所述车载单元还用于从路侧单元处获取第一道路信息和数据可信度,并结合数据可信度对第一道路信息和第二道路信息进行优先级排序,得到所述两种道路信息的优先级,基于高优先级的所述交通信息处理得到智能驾驶决策数据。
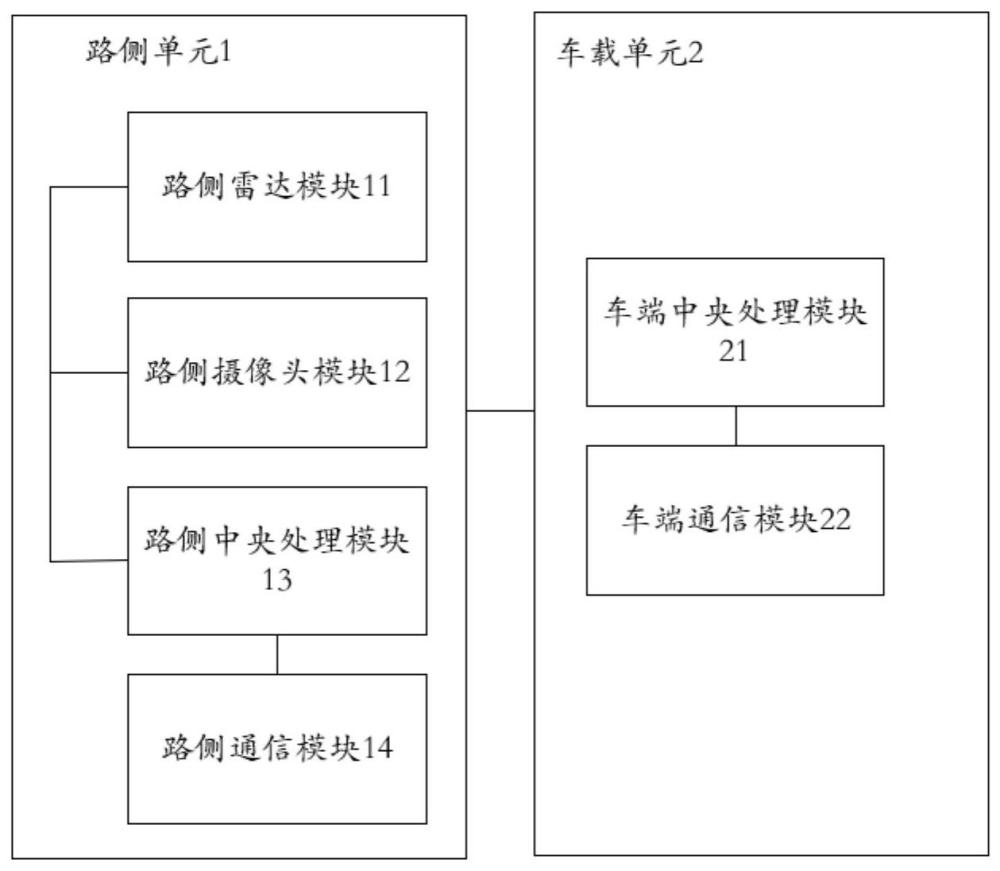
5、结合第一方面,在一种实施方式中,所述路侧单元包括:
6、路侧雷达模块,其用于采集路侧雷达数据;
7、路侧摄像头模块,其用于采集路侧图像数据;
8、路侧中央处理模块,其用于对路侧雷达数据和路侧图像数据进行数据融合,得到第一道路信息并输出;还用于接收路侧通信模块发送的第二道路信息,并根据第一道路信息和第二道路信息进行路侧单元的感知可信度计算,得到可信度数据并输出;
9、路侧通信模块,其用于接收路侧中央处理模块发送的第一道路信息和可信度数据并将其发送给车载单元,还用于接收车载单元发送的第二道路信息并输出。
10、结合第一方面,在一种实施方式中,所述车载单元包括:
11、车端中央处理模块,其用于对自车感知数据进行处理,得到第二道路信息并输出;还用于接收车端通信模块发送的第一道路信息和数据可信度,结合数据可信度对第一道路信息和第二道路信息进行优先级排序,得到所述两种交通信息的优先级,基于高优先级的所述交通信息处理得到智能驾驶决策数据;
12、车端通信模块,其用于接收车端中央处理模块发送的第二道路信息并将其发送给路侧单元,还用于接收路侧单元发送的第一道路信息和数据可信度并输出。
13、结合第一方面,在一种实施方式中,所述第一相关信息包括事件类型和事件位置;
14、所述第二相关信息包括交通参与者类型、交通参与者相关速度、交通参与者轮廓尺寸、以及交通参与者位置。
15、结合第一方面,在一种实施方式中,所述路侧单元进行感知可信度计算时,选取当前时刻前的指定时间段内的所有第一道路信息与第二道路信息进行比对,得到该指定时间段内第一道路信息和第二道路信息的重合率,根据重合率得到可信度数据;可信度数据与重合率成正比。
16、结合第一方面,在一种实施方式中,所述车载单元进行优先级排序时,判断自车与目标车之间的相对距离是否大于距离阈值d,若是,则将第一道路信息的优先级设为最高;若否,则判断目标车是否被遮挡;
17、若判定目标车被遮挡,则判断可信度数据是否不小于第二阈值a2,若是,则将第一道路信息的优先级设为最高;若否,则将第二道路信息的优先级设为最高;
18、若判定目标车未被遮挡,则判断可信度数据是否不小于第三阈值a3,若是,则将第一道路信息的优先级设为最高;若否,则将第二道路信息的优先级设为最高;
19、第二阈值小于第三阈值。
20、结合第一方面,在一种实施方式中,所述车载单元判断与自车位于同一道路上的目标车是否被位于所述两车之间的中间车遮挡时,判断中间车与自车之间是否满足轮廓尺寸比值大于比值阈值且距离差值小于距离阈值,若是,则判定目标车被遮挡;若否,则判定目标车未被遮挡。
21、结合第一方面,在一种实施方式中,所述车载单元判断与自车位于相交道路上的目标车是否被位于所述两车之间的路侧障碍物遮挡时,判断位于自车所处道路的道路中心线与自车和目标车连线的夹角范围内的路侧障碍物是否满足高度大于高度阈值、沿道路中心线的分布长度大于分布长度阈值、且距目标车所处道路的边沿线的最短相对距离小于相对距离阈值,若是,则判定目标车被遮挡;若否,则判定目标车未被遮挡。
22、结合第一方面,在一种实施方式中,所述路侧单元从还用于从第三方评定机构处获取标准道路信息,并根据第一道路信息和标准道路信息进行路侧单元的感知可信度计算,得到可信度数据,并在可信度数据不小于第一阈值时,启动运行以接收第二道路信息。
23、一种基于c-v2x的感知融合方法,基于所述的系统;所述方法包括:
24、通过路侧单元采集第一道路信息;
25、通过车载单元采集第二道路信息;
26、通过路侧单元从车载单元处获取第二道路信息,并根据第一道路信息和第二道路信息进行路侧单元的感知可信度计算,得到可信度数据;
27、通过车载单元从路侧单元处获取第一道路信息和数据可信度,并结合数据可信度对第一道路信息和第二道路信息进行优先级排序,得到所述两种交通信息的优先级,基于高优先级的所述交通信息处理得到智能驾驶决策数据。
28、本技术实施例提供的技术方案带来的有益效果包括:
29、以车载单元采集的第二道路信息作为标准,将路侧单元采集的第一道路信息与其进行比对,得到路侧单元感知数据的可信度,路侧单元将第一道路信息和可信度数据一并发给车载单元,车载单元结合可信度数据,对第一道路信息和第二道路信息进行优先级排序,根据高优先级的道路信息进行智能驾驶决策,从而在车端结合路侧感知数据实现超视距感知,并且由于车端掌握路侧感知数据的可信度,可根据实际情况选择信任车端感知数据还是路侧感知数据,可降低车辆对自身传感器感知性能要求,降低单车成本。
本文地址:https://www.jishuxx.com/zhuanli/20240808/271184.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。