一种基于多项式混沌法的船舶会遇航迹优化方法及系统
- 国知局
- 2024-08-01 00:22:22
本发明涉及船舶会遇控制,具体涉及一种基于多项式混沌法的船舶会遇航迹优化方法及系统。
背景技术:
1、在船舶的路径规划及避碰方面,由于海洋环境的不确定性、船舶自身操作特性以及避碰规则的限制等因素,在路径的决策规划中必须同时考虑船舶航行的危险度以及经济代价两方面的因素,以确保船舶在保证安全的前提下使用最小的经济代价完成航行任务。
2、常见的船舶路径规划方法主要有以a*算法为代表的全局路径规划方法以及以apf为代表的的局部路径规划方法。随着研究的不断深入,改进a*算法、人工势场法、神经网络、遗传算法等方法也被广泛应用于船舶路径规划。其中,遗传算法由于其所具有的自组织自学习和自适应特性,使得该算法可以广泛应用于不同的船舶避碰场景。遗传算法的基本思路是将船舶的控制量编码为染色体,之后经过对算子的遗传、交叉与变异,计算适应度,得到最优的控制量,实现船舶的路径规划。
3、但传统的遗传算法仍存在以下问题:未能充分考虑船舶自身的运动特性,且由于水动力系数的不确定性,难以建立准确的船舶运动模型,进而影响船舶航行的安全性。
技术实现思路
1、鉴于以上问题,本发明提出一种基于多项式混沌法的船舶会遇航迹优化方法及系统,用以解决由于水动力学参数的不确定性,难以建立精准船舶模型,导致路径规划时出现危险的问题。
2、根据本发明的一方面,提出一种基于多项式混沌法的船舶会遇航迹优化方法,该方法包括以下步骤:
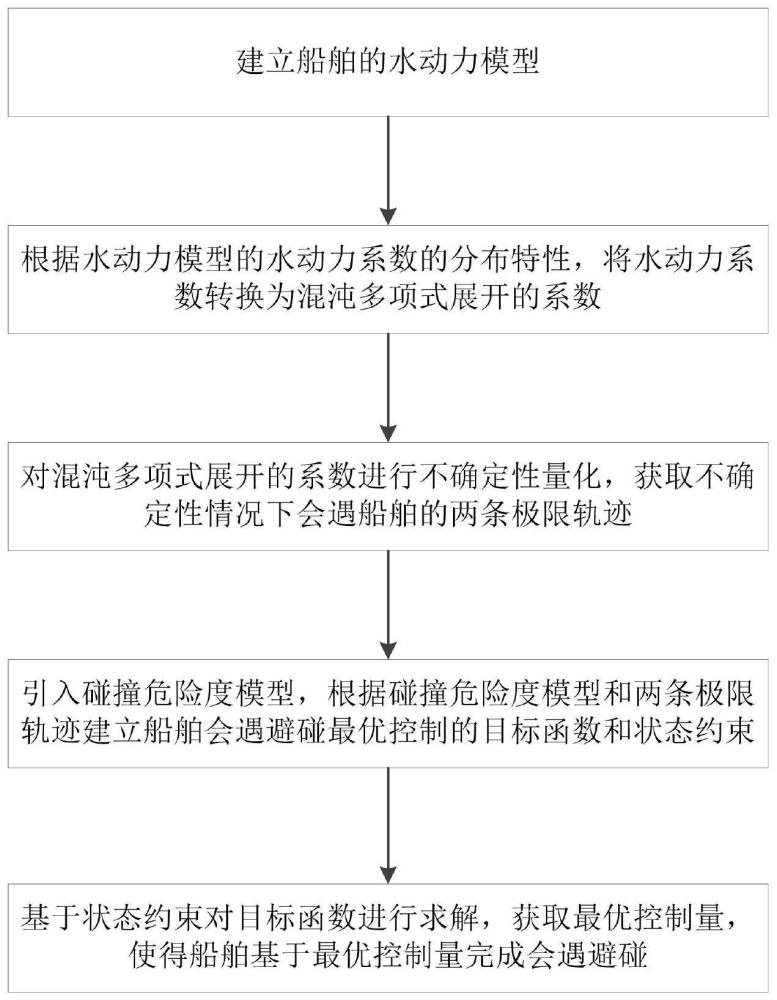
3、建立船舶的水动力模型;
4、根据所述水动力模型的水动力系数的分布特性,将水动力系数转换为混沌多项式展开的系数,对所述混沌多项式展开的系数进行不确定性量化,获取不确定性情况下会遇船舶的两条极限轨迹;
5、引入碰撞危险度模型,根据所述碰撞危险度模型和所述两条极限轨迹建立船舶会遇避碰最优控制的目标函数和状态约束;
6、基于所述状态约束,对所述目标函数进行求解,获取最优控制量,使得船舶基于最优控制量完成会遇避碰。
7、进一步地,所述水动力模型建立如下:
8、
9、式中,m表示船舶质量;iz表示船舶绕重心垂直轴旋转的惯性矩;xg表示船舶重心在y轴中线上的纵向坐标;u,v,r分别表示船舶的纵荡、垂荡、艏摇速度;表示纵向流体惯性力中关于纵向加速度的系数,表示横向流体惯性力中关于横向加速度的系数,表示转艏流体惯性力中关于横向加速度的系数,表示转艏流体惯性力中关于转艏加速度的系数;δ表示船舶的舵角控制量;fu(u,v,r,δ)、fv(u,v,r,δ)、fr(u,v,r,δ)为船舶在三个自由度方向上包括流体粘性力、状态量、控制量的展开式。
10、进一步地,所述对混沌多项式展开的系数进行不确定性量化包括:
11、将所述水动力模型进行泰勒展开,将泰勒展开式的任一系数视为输入随机变量,将船舶轨迹视为输出随机变量y,由多项式混沌法将输出随机变量y近似展开并改写为:
12、
13、其中,bi表示待定的确定性系数;ψi(ξ)表示一元i阶hermite多项式,ξ为服从标准正态分布的随机变量;np表示近似展开式对应的有限阶数展开式的系数个数;
14、利用galerkin投影法求解待定的确定性系数,并将所述确定性系数代入上式中,获得一系列包含正态分布随机变量的多项式函数,即为船舶轨迹;
15、基于所述一系列包含正态分布随机变量的多项式函数计算获取船舶轨迹分布的均值和方差,根据所述船舶轨迹分布的均值和方差计算获得会遇船舶两条极限轨迹。
16、进一步地,所述碰撞危险度模型包括最近会遇距离、最近会遇时间、相对距离、相对方位以及船速比的隶属度函数;其中,
17、最近会遇距离的隶属度函数表示为:
18、
19、式中,d1表示两船之间的安全距离;d2表示两船之间的安全通过距离;|dcpa|表示最近会遇距离的绝对值;
20、最近会遇时间的隶属度函数表示为:
21、
22、式中,t1表示施舵时间的上限;t2表示施舵时间的下限;|tcpa|表示最近会遇时间的绝对值;
23、相对距离的隶属度函数表示为:
24、
25、式中,ddla表示船舶的最晚施舵距离;darena表示需要避让的最大距离;rt表示相对距离;
26、相对方位的隶属度函数表示为:
27、
28、式中,θt表示相对方位;
29、船速比的隶属度函数表示为:
30、
31、式中,kv表示船速比,c表示两船碰角。
32、进一步地,所述船舶会遇避碰最优控制的目标函数为:
33、
34、式中,min表示最小值;max表示最大值;t1表示会遇起始时间,tn表示会遇终止时间;fδ(t)表示t时刻船舶的舵角控制量;与分别表示两条船舶会遇的两条极限轨迹的碰撞危险度模型;u1和u2分别表示与对应的权重,u1+u2=1;
35、所述船舶会遇避碰最优控制的状态约束为:
36、
37、
38、
39、
40、式中,x(t)表示船舶的状态量;f(.)表示船舶的水动力学模型方程;δ(t)表示船舶的舵角控制量;p(ξ)表示船舶的三个自由度方向上包含流体粘性力、状态量、控制量的展开式的系数,ξ表示服从高斯分布的随机变量;t表示时刻;δmax表示船舶一侧的最大舵角;θt表示来船的相对方位角;与表示船舶两条极限轨迹之间的最小距离,l表示本船长度,lt表示来船长度;ψmin、ψmax分别表示偏航角的最小、最大值;与表示会遇船舶两条极限轨迹偏离路径方向的偏航角。
41、进一步地,利用遗传算法对所述目标函数进行求解,获取最优控制量。
42、根据本发明的另一方面,提出一种基于多项式混沌法的船舶会遇航迹优化系统,该系统包括:
43、水动力模型建立模块,其配置成建立船舶的水动力模型;
44、水动力模型不确定性量化模块,其配置成根据所述水动力模型的水动力系数的分布特性,将水动力系数转换为混沌多项式展开的系数,对所述混沌多项式展开的系数进行不确定性量化,获取不确定性情况下会遇船舶的两条极限轨迹;
45、会遇最优控制模型建立模块,其配置成引入碰撞危险度模型,根据所述碰撞危险度模型和所述两条极限轨迹建立船舶会遇避碰最优控制的目标函数和状态约束;
46、会遇最优控制量获取模块,其配置成基于所述状态约束,对所述目标函数进行求解,获取最优控制量,使得船舶基于最优控制量完成会遇避碰。
47、进一步地,所述水动力模型建立如下:
48、
49、式中,m表示船舶质量;iz表示船舶绕重心垂直轴旋转的惯性矩;xg表示船舶重心在y轴中线上的纵向坐标;u,v,r分别表示船舶的纵荡、垂荡、艏摇速度;表示纵向流体惯性力中关于纵向加速度的系数,表示横向流体惯性力中关于横向加速度的系数,表示转艏流体惯性力中关于横向加速度的系数,表示转艏流体惯性力中关于转艏加速度的系数;δ表示船舶的舵角控制量;fu(u,v,r,δ)、fv(u,v,r,δ)、fr(u,v,r,δ)为船舶在三个自由度方向上包括流体粘性力、状态量、控制量的展开式。
50、进一步地,所述水动力模型不确定性量化模块中对混沌多项式展开的系数进行不确定性量化包括:
51、将所述水动力模型进行泰勒展开,将泰勒展开式的任一系数视为输入随机变量,将船舶轨迹视为输出随机变量y,由多项式混沌法将输出随机变量y近似展开并改写为:
52、
53、其中,bi表示待定的确定性系数;ψi(ξ)表示一元i阶hermite多项式,ξ为服从标准正态分布的随机变量;np表示近似展开式对应的有限阶数展开式的系数个数;
54、利用galerkin投影法求解待定的确定性系数,并将所述确定性系数代入上式中,获得一系列包含正态分布随机变量的多项式函数,即为船舶轨迹;
55、基于所述一系列包含正态分布随机变量的多项式函数计算获取船舶轨迹分布的均值和方差,根据所述船舶轨迹分布的均值和方差计算获得会遇船舶两条极限轨迹。
56、进一步地,所述会遇最优控制模型建立模块中所述碰撞危险度模型包括最近会遇距离、最近会遇时间、相对距离、相对方位以及船速比的隶属度函数;其中,
57、最近会遇距离的隶属度函数表示为:
58、
59、式中,d1表示两船之间的安全距离;d2表示两船之间的安全通过距离;|dcpa|表示最近会遇距离的绝对值;
60、最近会遇时间的隶属度函数表示为:
61、
62、式中,t1表示施舵时间的上限;t2表示施舵时间的下限;|tcpa|表示最近会遇时间的绝对值;
63、相对距离的隶属度函数表示为:
64、
65、式中,ddla表示船舶的最晚施舵距离;darena表示需要避让的最大距离;rt表示相对距离;
66、相对方位的隶属度函数表示为:
67、
68、式中,θt表示相对方位;
69、船速比的隶属度函数表示为:
70、
71、式中,kv表示船速比,c表示两船碰角;
72、所述船舶会遇避碰最优控制的目标函数为:
73、
74、式中,min表示最小值;max表示最大值;t1表示会遇起始时间,tn表示会遇终止时间;fδ(t)表示t时刻船舶的舵角控制量;与分别表示两条船舶会遇的两条极限轨迹的碰撞危险度模型;u1和u2分别表示与对应的权重,u1+u2=1;
75、所述船舶会遇避碰最优控制的状态约束为:
76、
77、
78、
79、
80、式中,x(t)表示船舶的状态量;f(.)表示船舶的水动力学模型方程;δ(t)表示船舶的舵角控制量;p(ξ)表示船舶的三个自由度方向上包含流体粘性力、状态量、控制量的展开式的系数,ξ表示服从高斯分布的随机变量;t表示时刻;δmax表示船舶一侧的最大舵角;θt表示来船的相对方位角;与表示船舶两条极限轨迹之间的最小距离,l表示本船长度,lt表示来船长度;ψmin、ψmax分别表示偏航角的最小、最大值;与表示会遇船舶两条极限轨迹偏离路径方向的偏航角。
81、本发明的有益技术效果是:
82、针对船舶的实际航行中存在的多种不确定性问题,本发明提出了一种基于多项式混沌法的船舶会遇航迹优化方法及系统,首先,建立船舶的水动力模型;然后,根据水动力模型的水动力系数的分布特性,将水动力系数转换为混沌多项式展开的系数,对混沌多项式展开的系数进行不确定性量化,获取不确定性情况下会遇船舶的两条极限轨迹;并引入碰撞危险度模型,根据碰撞危险度模型和两条极限轨迹建立船舶会遇避碰最优控制的目标函数和状态约束;基于状态约束对目标函数进行求解,获取最优控制量,使得船舶基于最优控制量完成会遇避碰。本发明优化后的最优控制量充分保障了船舶的安全航行,其最近会遇距离、相对距离等安全性指标较优;在考虑经济性的前提下,本发明保证了船舶不确定性情况下的安全航行。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200800.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表