一种停车场出入口车道事件感知方法及系统与流程
- 国知局
- 2024-07-31 20:42:15
本发明属于停车管理,具体的说,涉及一种停车场出入口车道事件感知方法及系统。
背景技术:
1、现有的封闭式停车场场景下,通过在出入口安装车牌识别设备,辅以停车场系统软件的形式来管理车辆的进入,如现有中国专利(申请号:cn202211548723.6)涉及一种非机动车的出入控制方法、系统、设备和存储介质,涉及停车管理技术领域。该方法包括:通过非机动车感知设备针对出入停车场的车辆进行车辆类型感应;在感应到出入口处通行的车辆为非机动车的情况下,输出第一引导提示;第一引导提示用于引导非机动车的使用对象靠近人脸识别设备,以通过人脸识别设备进行人脸识别,得到人脸识别数据;将人脸识别数据和注册人脸库进行匹配,得到人脸匹配结果;基于人脸匹配结果控制车道闸机,以对非机动车进行出入控制。
2、现有行业内通用的车牌识别设备通常只能在车辆接近时感知到车辆,同时识别车牌。大部分现有设备上无法感知到出入口车道内车辆发生的行为事件,从而造成一系列管理上的痛点,停车场控制系统负责对出入口车道上车辆是否放行进行规则判断,同时控制车道闸机。然而,当目标车辆紧跟前车进行通行,车道闸机无法阻拦后车,如目标车辆存在费用未缴纳,此行为构成跟车逃费,是停车场目前普遍存在但无法记录的痛点问题,若管理员采用人工物理放行,系统也无法感知车辆出场。跟车、人工放行、逆行、折返等行为都会导致过车计数不准,产生行业内无法精准统计停车场剩余车位的普遍痛点问题。
3、有鉴于此,特提出本技术。
技术实现思路
1、本发明要解决的技术问题在于克服现有技术的不足,提供一种停车场出入口车道事件感知方法及系统,实现提升停车场管理效果的目的。
2、为解决上述技术问题,本发明提供的一种停车场出入口车道事件感知方法,包括如下步骤:
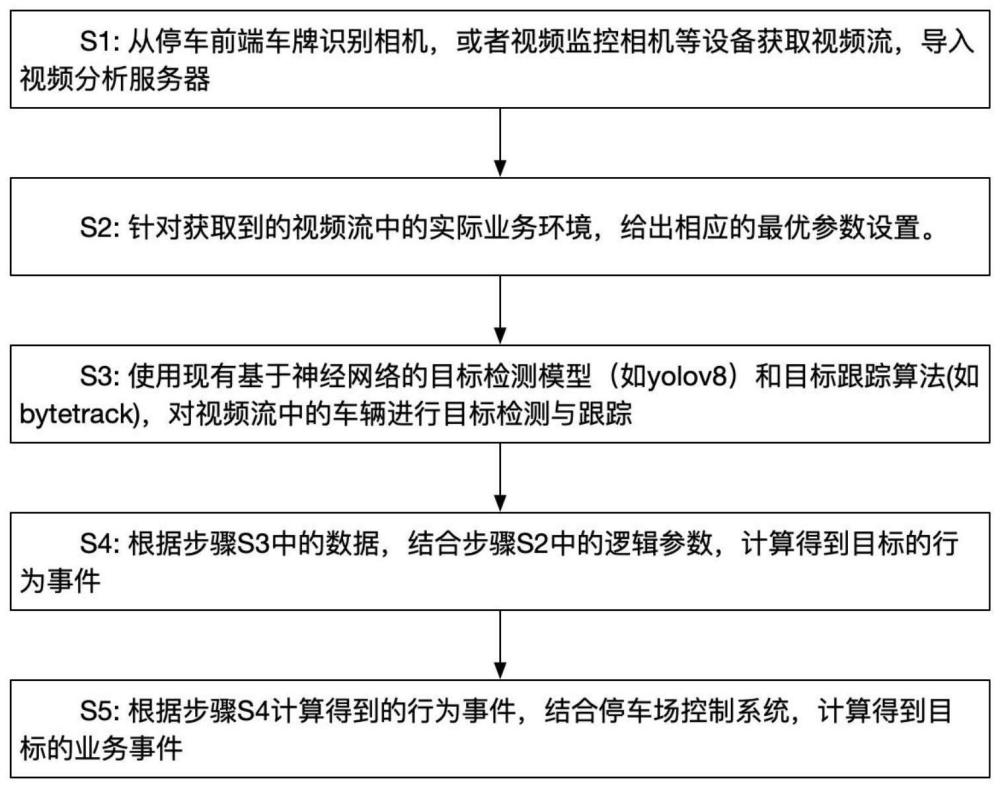
3、s1、从停车前端车牌识别相机,或者视频监控相机等设备获取视频流,导入视频分析服务器;
4、s2、针对获取到的视频流中的实际业务环境,给出相应的最优参数设置;
5、s3、使用现有基于神经网络的目标检测模型(如yolov8)和目标跟踪算法(如bytetrack),对视频流中的车辆进行目标检测与跟踪,得到目标id、目标bbox(boundingbox)、目标运行轨迹坐标tc(trajectory coordinate);
6、s4、根据步骤s3中的数据,结合步骤s2中的逻辑参数,计算得到目标的行为事件,根据业务场景,可取bbox的长方形下边中心点为目标的实际占位坐标;
7、s5、根据步骤s4计算得到的行为事件,结合停车场控制系统,计算得到目标的业务事件。
8、进一步的,所述步骤s2中的检测参数包括:检测的目标最小宽度(detected-min-w),目标最小高度(detected-min-h),检测目标数量(top-k),根据不同的相机视角选择目标检测模型如高杆监控视角模型(high_cam_model),或车牌识别相机视角模型(low_cam_model),检测的置信度(threshold)。
9、逻辑参数包括:出入口车道用于判断车辆行为的多边形检测区域(roi),由一组坐标点构成比如x1y1;x2y2;x3y3;x4y4,针对出入口车道有多个来车方向的问题,我们引入车辆的主要正向通行线(direction-a0),车辆的辅助正向通行线(direction-a1),车辆的主要逆向通行线(direction-b0),车辆的辅助逆向通行线(direction-b1),其次,设置车辆的滞留判定时间(roi_overtime_sec)和车辆的roi路径判定规则参数(roi_route_check_rule)。
10、进一步的,所述步骤s2在出入口车道内的车辆占据视频流画面的较大部分,可以根据实际效果调整步骤s2的目标检测参数,对远离车道的无价值车辆目标的过滤。
11、进一步的,所述步骤s4中实际占位坐标的坐标在参数roi约定的区域外,则判定目标的当前位置状态值(roi_status)为0,否则为1。当目标的roi_status为1时,进行时间累加,设为roi_time。当roi_time>roi_overtime_sec时,roi超时状态roi_overtime为1,否则为0。
12、进一步的,所述步骤s4中计算中可根据s3中得到的tc数据,结合direction-a0,direction-a1,direction-b0,direction-b1参数,可判定目标的当前方向状态值(dir_status)为正向1,反向2,其中;
13、当目标进入roi时,设roi_in_dir_status为当前的dir_status;
14、当目标离开roi时,设roi_out_dir_status为当前的dir_status;
15、根据目标运行轨迹与roi之间的关系数据,可以得到目标的roi路径状态(roi_route_status),正常的路径状态应该是出现在roi外,再进入roi,再离开roi,但由于目标检测参数和性能的变化,以及实际业务场景的多变,检测到的目标可能直接出现在roi内,或直接在roi内消失,所以roi_route_status的类型有3种,取决于目标的roi_staus变化,为“roi_staus=0roi_staus=1roi_staus=0”取值1,“roi_staus=1roi_staus=0”取值2,“roi_staus=0roi_staus=1”取值3。
16、进一步的,所述步骤s2中的roi_route_check_rule是约定目标应当满足哪种路径校验规则的参数,此参数的目的是过滤目标检测和跟踪结果中的干扰数据,比如目标被遮挡,其id值会发生变化,系统会认为产生了一个新的目标,从而导致错误的事件判定,本着质量优先的检测原则,未符合设定路径的目标将会被过滤,如规则为至少满足“roi_staus=0roi_staus=1”,则roi_route_status值为1和3均满足要求,目标路径检测结果roi_route_check符合条件为1,否则为0。
17、进一步的,所述步骤s2中,实际场景中目标检测与跟踪可能会发生bbox轨迹漂移,此时目标会出现roi重入,导致重复事件,所以我们还需对结果进行过滤优化,假定id为n的目标发生了正常通行事件,则把事件记录到一个缓存队列,在给定时间t内如果再次发生id为n的正常通行事件,则过滤此事件,同样的判定可用于逆向通行和折返事件。
18、进一步的,所述步骤s5中,视频分析服务器将判定后的行为事件结果通知给停车场控制系统,设定行为事件behavior_event中“正常通行事件”为1,“逆向通行”为2,“折返”为3,停车场控制系统给出当前目标车辆的是否放行信号,设为release_signal,1为放行,2为不放行,0为无车不处理,当前目标车辆是否收费,设为pay_flag,1为收费,0为不收费.
19、一种停车场出入口车道事件感知系统,包括视频监控相机、视频分析服务器和停车场控制系统,其中;
20、所述视频监控相机用于捕捉停车场出入口车道的实时视频流和辅助车牌识别,其中;
21、所述视频流包含了车辆进出、车牌识别、车辆行为事件等关键信息;
22、所述视频分析服务器用于对视频流的内容进行分析,并给出相应的最优参数设置;
23、所述停车场控制系统用于根据规则判断的结果,控制车道闸机的开关,决定车辆是否可以进出停车场,以及与其他子系统,如视频监控相机等进行集成,实现信息的共享和协同工作。
24、采用上述技术方案后,本发明与现有技术相比具有以下有益效果。
25、1、本发明中,提出了一种停车场出入口车道车辆行为事件的判定方法,行为事件为停车场管理解决痛点问题提供了原始行为数据,基于前端视频采集设备、视频分析服务器、停车场控制系统,结合车辆行为事件和停车场控制系统业务规则,可以感知车道车辆的业务事件,为停车场管理解决痛点问题提供了直接的业务数据。
26、2、本发明中,当出入口车道环境较为复杂时,提出了一种主、辅方向判定的方法,可以满足不同来车角度车辆的通行事件感知,提出了一种车辆的roi路径判定规则,可以过滤掉目标检测和跟踪过程中未符合轨迹的干扰数据。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187500.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表