前方车辆的盲区预警系统
- 国知局
- 2024-07-31 20:42:20
本发明关于一种盲区预警系统,特别是指用于警示前方车辆转向的盲区的辅助系统。
背景技术:
1、为了让生活更具便利性与机动性,现代人依赖汽车、摩托车及自行车等作为代步工具,但也因此伴随着不少的交通事故,和汽车相比,骑乘包覆性较低的摩托车或自行车的驾驶者,一旦发生交通事故容易造成较严重的伤亡,主要肇事原因多为「未注意前车状况」、「超速驾驶」、「疲劳驾驶」等,而近年来另一肇事原因「大型车造成摩托车涉入」也逐年攀升,且多为立即死亡(a1类)的交通事故。
2、探究「大型车造成摩托车涉入」事故发生的原因,大多是因大型车的视线死角及内轮差所造成,虽然目前已有许多大型车安装一环景影像辅助系统,该环景影像辅助系统可供大型车驾驶者驾驶时,通过驾驶者旁的一显示器即时观察大型车的车旁状况。然而,大型车驾驶者可能尚无随时留意该显示器的驾驶习惯,仍依靠驾驶者本身的主观意识驾驶大型车,对于行驶在大型车车旁的摩托车或自行车的驾驶者而言,其人身安全并未得到实质上的改善,导致该类事故发生次数没有因为大型车安装该环景影像辅助系统而递减。
技术实现思路
1、有鉴于大型车转弯时产生的内轮差盲区相当大,摩托车及自行车甚至行人,常在缺乏被警示的状况下即进入其内轮差盲区,导致「大型车造成机车涉入」的交通事故频传。
2、本发明提出一种前方车辆的盲区预警系统,包含:
3、一摄影单元,该摄影单元的拍摄方向为使用者的行进方向,拍摄使用者的前方影像以输出一即时影像;
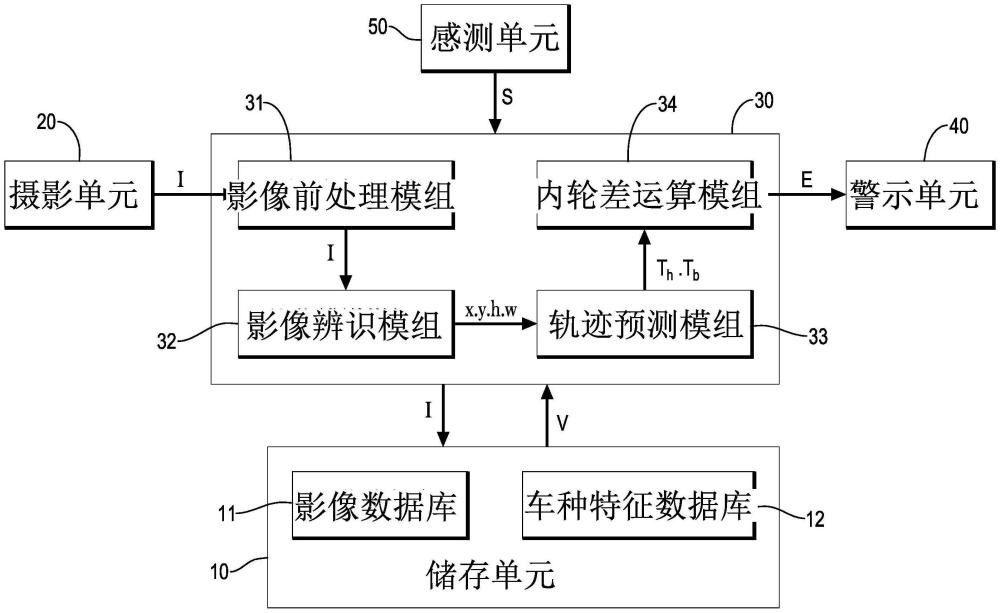
4、一运算单元,电连接该摄影单元以接收该即时影像;该运算单元执行一影像辨识模型的程序数据,以辨识该即时影像中的一目标车辆的多个目标特征;该运算单元预测该目标车辆的一转弯轨迹信息,再根据该转弯轨迹信息计算一内轮差范围,根据该内轮差范围产生一警示讯号;
5、一警示单元,电连接该运算单元以接收该警示讯号,并根据该警示讯号发出警示。
6、本发明前方车辆的盲区预警系统通过该运算单元持续接收该摄影单元拍摄的该即时影像,对该即时影像进行影像辨识,辨识出该即时影像中该目标车辆的多个目标特征;该运算单元根据该多个目标特征预测该目标车辆的一转弯轨迹信息,再根据该转弯轨迹信息计算该目标车辆的该内轮差范围。该运算单元根据该内轮差范围产生该警示讯号以控制该警示单元,令该警示单元发出警示以提示使用者注意前方路况并留意行车距离,达到辅助行车、提升使用者用路安全的功效。
技术特征:1.一种前方车辆的盲区预警系统,其特征在于,包含:
2.如权利要求1所述的前方车辆的盲区预警系统,其特征在于,该摄影单元、该运算单元及警示单元设置在一车辆而为车载装置,其中,该多个目标特征为二目标特征,该二目标特征分别表示该目标车辆的一车身中心及一车头中心,且该运算单元根据该二目标特征预测该目标车辆的该转弯轨迹信息。
3.如权利要求1所述的前方车辆的盲区预警系统,其特征在于,该摄影单元、该运算单元及警示单元设置在一车辆而为车载装置,其中,该多个目标特征为二目标特征,该二目标特征分别表示该目标车辆的一内侧后轮中心及一内侧前轮中心,且该运算单元根据该二目标特征预测该目标车辆的该转弯轨迹信息。
4.如权利要求2或3所述的前方车辆的盲区预警系统,其特征在于,该运算单元包含一影像前处理模组,该影像前处理模组接收该即时影像并对该即时影像进行影像前处理。
5.如权利要求2或3所述的前方车辆的盲区预警系统,其特征在于,该运算单元包含一影像辨识模组,该影像辨识模组接收完成影像前处理的该即时影像并执行该影像辨识模型的程序数据,利用基于递归的深度学习技术辨识该多个目标特征。
6.如权利要求2或3所述的前方车辆的盲区预警系统,其特征在于,该运算单元包含一轨迹预测模组,该轨迹预测模组通过一长短期记忆模型进行该转弯轨迹信息的预测。
7.如权利要求2所述的前方车辆的盲区预警系统,其特征在于,该运算单元包含一内轮差运算模组,该内轮差运算模组接收该转弯轨迹信息,该转弯轨迹信息包含一车头轨迹及一车身轨迹,该内轮差运算模组根据该车头轨迹、该车身轨迹及该目标车辆的一车宽信息,计算该目标车辆的一内侧前轮轨迹及一内侧后轮轨迹,该内侧前轮轨迹及该内侧后轮轨迹围出的范围即为该内轮差范围。
8.如权利要求3所述的前方车辆的盲区预警系统,其特征在于,该运算单元包含一内轮差运算模组,该内轮差运算模组接收该转弯轨迹信息,该转弯轨迹信息包含一内侧前轮轨迹及一内侧后轮轨迹,该内侧前轮轨迹及该内侧后轮轨迹围出的范围即为该内轮差范围。
9.如权利要求2或3所述的前方车辆的盲区预警系统,其特征在于,该警示单元为一指示灯,该指示灯设置在该车辆的一仪表板,该警示讯号用以控制该指示灯的一亮灭状态,反映该车辆是否将进入该内轮差范围;当该车辆将进入该内轮差范围,该指示灯呈亮起;当该车辆将不进入该内轮差范围,该指示灯呈熄灭。
10.如权利要求2或3所述的前方车辆的盲区预警系统,其特征在于,该警示单元为一激光头模组,该激光头模组设置在该车辆的车头位置,该警示讯号用以控制该激光头模组于该车辆前方投射出一激光轨迹,该激光轨迹反映该内轮差范围。
技术总结本发明为一种前方车辆的盲区预警系统,包含有一摄影单元、一运算单元及警示单元。该摄影单元的拍摄方向为使用者的行进方向,拍摄使用者的前方影像以输出一即时影像;该运算单元持续接收该即时影像并可执行一影像辨识模型的程序数据,通过该影像辨识模型对该即时影像进行影像辨识,辨识出该即时影像中一目标车辆的多个目标特征,根据该多个目标特征预测该目标车辆的一转弯轨迹信息,并根据该转弯轨迹信息计算出该目标车辆的一内轮差范围,再依该内轮差范围产生一警示讯号以控制该警示单元,令该警示单元发出警示以提示使用者注意前方路况。技术研发人员:林昱成,张咏皓,张育慈,颜钰静受保护的技术使用者:逢甲大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240731/187507.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。