一种用于高速公路的路面水膜飞溅范围计算方法
- 国知局
- 2024-07-31 20:44:08
本发明涉及交通安全,尤其涉及一种用于高速公路的路面水膜飞溅范围计算方法。
背景技术:
1、车辆的安全行驶是驾驶者、道路安全监管部门、政府所共同担忧的事件。但往往有一些不可控因素在影响着车辆的安全驾驶,诡异多变的天气因素对于车辆安全行驶有着重要影响。本发明以路面积水对车辆行驶安全的影响为切入点,同时考虑到高速公路车辆行驶速度快、发生事故后的影响程度高的特点,因此,本发明着重研究路面积水影响下的高速公路的车辆安全行驶问题。在实际情况之中,由于降雨天气降水量的增多以及高速公路平整度的出现,会在高速公路的路面出现一层薄薄的路面水膜,此种水膜对于车辆的安全行驶具有一定的影响,同时由于一些其他原因也会导致路面水膜的产生。路面水膜会对通过的车辆产生侧滑等异常的驾驶干扰,当有车辆经过路面水膜时,由于车轮与路面水膜的高速接触在行驶车辆的侧后方会出现一层溅起的水雾,会对产生水膜的后方产生一定的视线遮挡,从而造成一定的交通事故,对车辆与驾驶者造成人身财产安全损失。
2、在现有的相关研究之中,多从车辆本身的装置入手,从车辆的轮胎材质与花纹的改善或设置可隔绝水雾的机械装置对于水雾进行飞溅后的格挡。但在上述的两种方案之中,会存在因情况复杂,在一些路面状况过于复杂的情况下而导致的水雾阻挡率不高、防护效果不佳的情况,同时上述的设施,由于时对车辆的机械改进,所以会对于车辆的行驶性能造成影响,甚至该设置会在其他的道路安全方面成为一个潜在隐患因素。而现有的水雾警示装置研究较少,警示方法与流程科学性较差、流程简易。多对于在路面出现水膜的情况之下的水膜信息,但是对于如何在接收到水雾检测信息后如何进行对车辆进行安全的警示工作没有进行详细的论述无法有效的保障道路行驶者的人身财产安全。
3、如何在测量出水雾信息后,并计算出该水雾对于道路行驶者的影响,成为了一件亟需解决的技术问题。
技术实现思路
1、本发明目的在于提供一种用于高速公路的路面水膜飞溅范围计算方法,在高速公路上,高速旋转的车轮与路面积水接触后而产生的影响车辆行驶的水雾的情况,从检测环境入手,随后对于路面积水的水膜信息进行收集,最后采集预经过水膜的车辆信息,利用上述信息计算出车辆飞溅的水膜信息,最后通过水膜影响范围等来确定最终的水雾影响警示,以达到解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种用于高速公路的路面水膜飞溅范围计算方法,包括如下步骤:
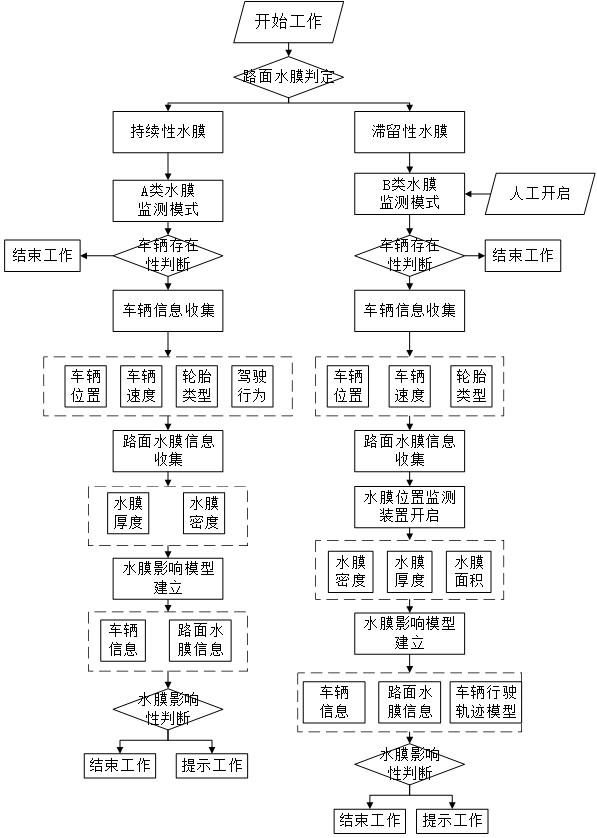
4、步骤1:对路面中水膜的存在性判断,将其分为a类持续性路面水膜、b类滞留性路面水膜,并使用水膜警示系统的中心控制模块对于具体类型进行判断;a类持续性路面水膜为持续性路面水膜定义为由于降雨天气所导致的路面出现持续性水膜的情况;b类滞留性路面水膜定义为在非降雨天气的原因下所导致的路面出现持续性水膜的情况;
5、步骤2:检测车辆实时检测车辆的侧向车道中是否存在车辆,并采集侧向车道中车辆的速度信息、相较于检测车辆的位置信息与被检测车辆的轮胎信息;
6、步骤3:根据所检测的水膜类型,来进行具体的水膜厚度信息获取;
7、步骤4:建立路面水膜飞溅水雾模型,通过所获取的信息来建立水膜飞溅水雾的模型,并确定是否会对行驶中的车辆产生影响。
8、本发明的进一步方案是,步骤1包括以下过程:
9、步骤1.1:在车辆行驶过程中,首先获取车辆所在地的地理位置信息,并与该地区的天气网络系统相链接,检测车辆的位置信息在一定的时间区间内是否有降雨;由于路面水膜会产生于降雨之前、降雨之后以及一些特殊积水路段;基于降雨已发生、降雨正在发生以及特殊积水路段三种状态分别进行不同的启动方式与判定方式;
10、步骤1.2:当判定结果为降雨已发生状态时,便开启水膜检测系统的b类滞留性路面水膜检测模式;当判定结果为降雨正在发生状态便采取便开启水膜检测系统的a类持续性路面水膜检测模式;在特殊积水路段中,由于其他原因所导致的路面积水,采用人工启用的方法,由于该种情况的路面水膜积水多与滞留性路面积水情况相似,所以也采用b类滞留性路面水膜检测模式。
11、本发明的进一步方案是,所述步骤2中检测车辆实时检测车辆的侧向车道中是否存在车辆,使用车辆信息采集与计算模块采集侧向车道中被检测车辆的速度信息vl(单位:km/h)、被检测车辆相较于检测车辆的位置信息(xl0,yl0)、被检测车辆的轮胎信息ql=(dl,bl,cl),其中dl表示轮胎宽度(单位:cm),bl轮胎凹槽深度(单位:mm),以及检测车辆与被检测车辆的位置影响判定公式;
12、本发明的进一步方案是,其中步骤2包括以下过程:
13、步骤2.1:对被检测车辆存在性进行检测,该装置主要用来确定被检测车辆是否存在,当检测结果为存在时,获取被检测车辆的速度信息vl(km/h)、与被检测车辆的位置信息(xl0,yl0)、被检测车辆的轮胎信息ql=(dl,bl,cl);
14、步骤2.2:在被检测车辆的速度获取过程中,通过车辆信息采集与计算模块获取被检测车辆的速度,将被检测车辆的速度记作vl(km/h);在记录被检测车辆的位置信息的过程中,为方便计算与位置记录,建立直角坐标系;以检测车辆的行驶方向为y轴的正方向,以检测车辆的行驶方向的垂直方向为x轴的正方向,上述的x轴y轴的交点为坐标原点(单位:m);以坐标系为参考系,记录被检测车辆的位置坐标,将被检测车辆的位置信息记录为(xl0,yl0),其中xl0表示被检测车辆关于直角坐标系的x轴的位置信息,yl0表示被检测车辆关于直角坐标系的y轴的位置信息;
15、步骤2.3:获取被检测车辆的轮胎信息ql=(dl,bl,cl),在车辆水雾产生的影响因素中,车辆的轮胎特征与面积等信息会对水雾产生造成影响,主要选取被检测车辆车轮的车轮宽度、车轮花纹与凹槽深度、以及水雾遮挡物的存在性;将上述检测的信息进行编译ql=(dl,bl,cl),其中ql表示被检测车辆的轮胎信息集合,dl表示轮胎宽度(单位:cm),bl轮胎凹槽深度(单位:mm),cl表示水雾遮挡物的存在性,水雾遮挡物主要分为正后方水雾遮挡装置、侧后方水雾遮挡;
16、步骤2.3:依据步骤2所获取的与被检测车辆的位置信息(xl0,yl0),并记录被检测车辆的速度信息vl(单位:km/h)与检测车辆的速度信息vj(单位:km/h);从检测车辆的左侧视角和右侧视角为切入点,将被检测车辆的位置出现在检测车辆的视角范围内记录为检测车辆与被检测车辆出现位置影响;将车辆的左侧视角设置为35°,右侧视角为60°;在实际情况之中车辆处于持续的位置移动,所以检测车辆的位置信息与被检测车辆的位置信息是两个按照一定轨迹移动的曲线;将检测车辆的位置信息轨迹曲线设置为yjt=f(xjt);
17、其中f(xjt)表示检测车辆的轨迹曲线方程;
18、yjt表示检测车辆在建立坐标系之中关于时间t的y轴坐标值;
19、xjt表示检测车辆在建立坐标系之中关于时间t的x轴坐标值;
20、将被检测车辆的位置信息轨迹曲线设置为ylt=f(xlt);
21、其中f(xlt)表示被检测车辆的轨迹曲线方程;
22、ylt表示被检测车辆在建立坐标系之中关于时间t的y轴坐标值;
23、xlt表示被检测车辆在建立坐标系之中关于时间t的x轴坐标值;
24、检测车辆的位置信息(xjt,yjt)与被检测车辆的位置信息(ylt,xlt),确定检测车辆的视野范围区域将其设置为slt(单位:m2);
25、建立如下的检测车辆与被检测车辆的位置影响判定公式:
26、
27、其中p(x,y)表示检测车辆与被检测车辆的位置是产生影响可能公式;
28、表示检测车辆与被检测车辆的位置会产生影响既被检测车辆出现在检测车辆的视野范围区域slt内;表示检测车辆与被检测车辆的位置不会产生影响既被检测车辆未出现在检测车辆的视野范围区域slt内。
29、本发明的进一步方案是,所述步骤3中,根据步骤1所检测的水膜检测模式,来进行具体的水膜检测过程,主要为通过水膜信息采集与检测模块进行测量水膜的基本信息,并对a类持续性路面水膜检测模式与b类滞留性路面水膜检测模式进行不同的检测过程;
30、其中步骤3包括以下过程:
31、步骤3.1:a类持续性路面水膜检测模式,a类路面水膜,是一种由于持续的降雨在高速公路的路面出现的一层水膜,但是由于降雨量的变化,所以会对路面水膜的基本信息产生影响,所以需要对路面的水膜进行一定周期的检测,并使用检测所得的数据;
32、在a类持续性路面水膜检测过程中,首先对路面水膜的厚度进行测量,将路面水膜的厚度记作dah(单位:mm),在具体的操作过程之中,由于路面水膜为持续性的停留在高速公路的表面,在不考虑路面坡度与路面平整度的情况下,使用光的通过不同介质的传播速度,水深=时间差×光速/2;
33、具体公式如下:
34、
35、其中dah表示a类水膜厚度(单位:mm);
36、δt表示发出光线与接收到光线的时间差(单位:s);
37、vl代表使用的激光的传播速度(单位:mm/s);
38、考虑到在实际的持续性降水情况中,路面水膜的深度会随着降雨量的变化而产生变化,所以需要对路面水膜进行实时的检测,由于路面水膜需要与行驶中的车辆接触才才会出现影响驾驶的水雾情况,所以当在步骤2之中出现车辆时则会对路面水膜的厚度进行测量;
39、步骤3.2:b类滞留性路面水膜检测模式,b类路面水膜的产生多发生于降雨之后由于路面的不平整的问题,导致了路面水膜的产生,或者其他原因导致的路面之中出现部分的路面水膜的现象;在b类滞留性路面水膜检测模式之中,首先需要测量路面水膜的位置信息与面积信息,随后测量水膜的厚度信息;
40、在b类滞留性路面水膜检测过程中,首先使用一个带有光发射源的光源发射装置,在扫描到有路面积水的时候,光源发射装置的图像处理显示会出现不同于无积水时的图像结果,随后会对于水膜的长度进行检测;
41、当检测到水膜的基本信息后,由当没有路面积水,光线hg会直接被路面所吸收,当出现路面积水的时候便会由于光的反射现象对于光线产生的路径变化,通过该种物理变化;结合实时的水膜检测器的位置信息,对于所检测到的水膜信息进行物理图像的建立图像解决方法,对装置的原理图可以简化为物理概念模型图,在物理概念图中de表示水膜的厚度,为未知量其他线段长度均为一致长度,所以本发明建立b类滞留性路面水膜厚度信息计算公式:
42、
43、其中gz表示图中的物理概念的gz的长度(单位:mm);
44、de表示图中的物理概念的de的长度(单位:mm);
45、sinb表示图中的物理概念的角hbz的sin值;
46、sinz表示图中的物理概念的角z的sin值,
47、在实际意义之中,de表示水膜的厚度(单位:mm),考虑到路面水膜的厚度的非均衡性,所以对于水膜厚度进行多次测量,水膜的厚度多为不恒定的一个数值,在同一片路面积水中会有一定的水位差异,所以首先利用水膜检测装置的水膜轮廓简图,建立不规则图形的重心点,对于重心点为中心点,对于不规则的图形进行分割线的建立,对于分割线的两端采用上图的水膜厚度的计算方法;所以对于所有的分割线段进行标点,得出最终的水膜厚度的计算公式:
48、
49、本发明的进一步方案是,所述步骤4根据步骤2、步骤3所获取的建立路面水膜飞溅水雾模型,通过所获取的信息来建立水膜飞溅水雾的模型,并确定是否会对行驶中的车辆产生影响;
50、通过上述步骤所测算出来的车辆位置信息、路面水膜厚度、路面水膜长度来建立水膜飞溅影响模型,在具体的水膜飞溅影响模型之中,主要依据水雾高度、水雾宽度、水雾可见度来判定是否会对后方车辆产生影响;
51、步骤4.1:首先建立水雾高度影响模型:
52、
53、其中h表示飞溅水雾的高度(单位:cm);
54、k表示路面状况与车辆轮胎的系数;
55、vl表示车辆的行驶速度(单位:m/s);
56、g表示重力加速度;
57、步骤4.2:其次建立水雾可见度影响模型,将水雾的可见度转化为每立方米的所含有的水的质量,将其定义为ml(单位:kg/m3),同时由车辆行驶所产生的水雾通常分为侧方水雾mlsi(单位:kg/m3)与后方水雾mlbe(单位:kg/m3),则车辆所造成的水雾影响模型为:
58、ml=mlsi+mlbe;
59、通过流体力学与研究发现侧方水雾与后方水雾可见度水雾的最大水量为:
60、sli=vl·d·dal·γ;
61、其中sli表示最大用水量(单位:kg/s),i可取(si、be)(si表示侧方水雾,be表示后方水雾);
62、vl表示卡车速度(单位:m/s);
63、d表示轮胎宽度(单位:m);
64、dal表示水膜厚度(单位:m);
65、γ表示水的密度;
66、考虑到车辆轮胎的凹槽问题所以对上述公式展开关于轮胎实际接触水膜的深度,所以依据轮胎凹槽的占比对上述模型进行改正;
67、首先修正侧方水雾,将其定义为slsi+1表示修正后的侧方用水量:
68、slsi+1=(1-α)·vl·d·γ·(dal-k·hz-(1-k)·hg);
69、slbe+1=α·vl·d·γ·(dal-k·hz-(1-k)·hg);
70、其中slsi+1表示修正后的侧方用水量(单位:kg/s);
71、其中slbe+1表示修正后的后方用水量(单位:kg/s);
72、α表示水流体力学的系数;
73、vl表示卡车速度(单位:mm/s);
74、d表示轮胎宽度(单位:mm);
75、dal表示水膜厚度(单位:mm);
76、γ表示水的密度;
77、k表示轮胎中非凹槽处所占的比率;
78、hz表示每次轮胎旋转的水膜深度(单位:mm);
79、hg表示每次轮胎表面的水深度(单位:mm);
80、最后计算可见度与最大用水量的模型:
81、mlbe=(2.67·10-5·vl-4.71·10-4)slbe+1;
82、mlsi=(1.65·10-5·vl-3.99·10-4)slsi+1;
83、侧方水雾mlsi(单位:kg/m3)与后方水雾mlbe(单位:kg/m3),
84、对于水雾的可见度结果进行等级分类,将结果分为5个等级,其中等级1的可见度指标为0.000-0.005kg/m3;等级2的可见度指标为0.005-0.010kg/m3;等级3的可见度指标为0.010-0.015kg/m3;等级4的可见度指标为0.015-0.020kg/m3;等级5的可见度指标为0.020kg/m3及以上;
85、其中等级2及以上为会影响驾驶员驾驶的水雾可见度;
86、对于车辆的水雾高度、水雾可见度、车辆位置信息模型进行结合,建立水雾影响模型如下:
87、
88、其中p表示水雾影响模型;
89、ph表示水雾高度影响判定公式;
90、h表示水雾高度(单位:m);
91、hc表示检测车辆的前侧车窗高度(单位:m);
92、pml表示水雾可见度判定公式;
93、p(x,y)表示检测车辆与被检测车辆的位置影响判定公式;
94、在上述的判定公式之中当p值为1时表示会发生该种形式的影响可能,当最终的影响模型结果为3时便表示会对检测车辆造成影响。
95、本发明的有益效果:
96、与现有技术相比,本发明首先研究了高速公路的车轮水雾的问题,填补了相关方面的研究缺失,并且在对于路面水膜检测与信息收集采用光的折射原理制造成本简单,效果收益高。同时弥补了现有相关研究中从物理装置方面来解决车辆的水雾问题,但水雾的影响多在产生在车辆的侧后方车辆,所以本发明从水雾的影响方车辆进行研究,此种方法可以有效地减少水雾产生的影响,并使得本装置获得一定的使用率、保障道路行驶者的安全。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187626.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。