基于进口道车辆时空轨迹数据的单点交叉口信号在线控制方法
- 国知局
- 2024-07-31 20:44:10
本发明涉及道路交通控制领域,具体是涉及一种基于进口道车辆时空轨迹数据的单点交叉口信号在线控制方法。
背景技术:
1、目前在单点信号灯控制领域的研究成果主要可分为三类:定时控制、感应控制以及自适应控制。
2、定时控制采用固定的信号灯控制方案,即周期时长、绿信比等控制参数保持不变。由于无法响应随机变化的交通需求,定时控制只适用于交通状况简单的场合。然而在交通流日渐复杂、交通拥堵日趋严重的背景下,定时控制的应用范围越来越小。
3、感应控制虽然能响应实时交通需求,但因其只能检测到是否有车辆到达,不能获得未来某一时段到达车辆的情况,若是在极限延长时间内,绿灯通行相位一直有零零散散的车辆到达目标单点交叉口,即使红灯相位的排队车辆数很多,绿灯也会一直延长,从而导致不公平的通行权分配结果。而且,感应控制属于刺激-反应的控制模式,一般适用于低流量的信号灯控制交叉口,对大流量的信号灯控制交叉口一般没有意义。
4、自适应控制虽能以平均延误最小、空放时间最少等为优化目标做出最优控制决策,但其决策依据大多是基于实时断面检测交通数据进行短期交通流预测,对数据精度、模型建立、算法设计等方面具有较高的要求,从而导致实际应用效果不佳。同时,断面检测交通数据往往无法反映出目标单点交叉口全面的交通状况,使基于此类交通数据得到的信号配时方案较难与实际交通状况相贴合。
5、同时,与定时控制相比,感应控制和自适应控制虽能更好地响应随机变化的交通需求,但目前较少有研究将这两种方法与信号灯倒计时相结合,无法给出与实际情况相吻合的倒计时方案。
技术实现思路
1、本发明的实施例提供了一种基于进口道车辆时空轨迹数据的单点交叉口信号在线控制方法,以实现有效地提高目标单点交叉口的时空资源的利用率。
2、为了实现上述目的,本发明采取了如下技术方案。
3、一种基于进口道车辆时空轨迹数据的单点交叉口信号在线控制方法,包括:
4、步骤s0,确定车辆数据获取频率,获取目标单点交叉口的空间形态信息、空间划分方案、信号配时基本方案和通行特征参数,确定目标单点交叉口各相位的约束条件;
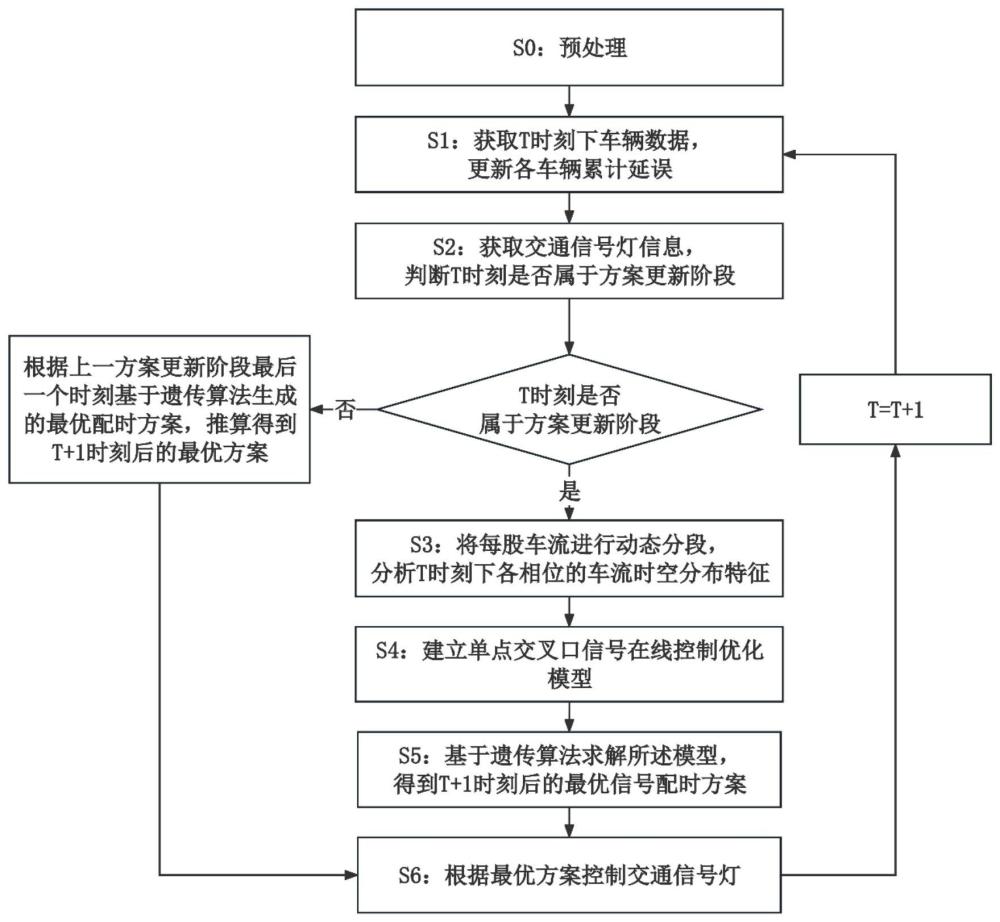
5、步骤s1,获取t时刻下目标单点交叉口的车辆数据,更新位于目标单点交叉口进口道的各车辆的累计延误;
6、步骤s2,获取目标单点交叉口的交通信号灯信息,判断t时刻是否属于方案更新阶段,如果是,则执行步骤s3-步骤s6,否则,根据上一方案更新阶段最后一个时刻基于遗传算法生成的最优配时方案,推算得到t+1时刻后的最优方案,执行步骤s6;
7、步骤s3,将每股车流进行动态分段,分析t时刻下目标单点交叉口的各相位车流时空分布特征;
8、步骤s4,根据所述目标单点交叉口的各相位车流时空分布特征和各相位的约束条件,建立目标单点交叉口信号在线控制优化模型;
9、步骤s5,基于遗传算法求解所述目标单点交叉口信号在线控制优化模型,得到t+1时刻后的最优信号配时方案;
10、步骤s6,根据t+1时刻后的最优信号配时方案控制目标单点交叉口的交通信号灯。
11、优选地,所述的步骤s0,确定车辆数据获取频率,获取目标单点交叉口的空间形态信息、空间划分方案、信号配时基本方案和通行特征参数,确定目标单点交叉口各相位的约束条件,包括:
12、s0-1)确定车辆数据获取频率δt,δt的计算公式如下:其中t1代表为了获取某时刻下的车辆数据所需的数据采集时间,t2代表单点交叉口信号在线控制方法所需的计算时间;
13、s0-2)获取目标单点交叉口的空间形态信息,该空间形态信息包括各进口的车道数量、类型,以及各车道、停车线的位置;
14、s0-3)确定标准车辆的占地空间,以标准车辆占地空间为单位长度,将目标单点交叉口进口道区域中的每条车道划分为若干个等长的单元格;
15、s0-4)确定目标单点交叉口的信号配时基本方案:包括绿灯倒计时的时长要求、相位划分和相位转换所需的绿灯间隔时间;
16、s0-5)确定目标单点交叉口各相位的约束条件,该约束条件包括:最小绿灯时间约束,取决于该相位对应的行人过街所需的最短时间;最大红灯时间约束,取决于行人过街前的最长允许等待时间;最大车均延误约束,根据相位的流量大小和重要度,确定该相位允许的最大车均延误;最大排队长度约束,根据道路条件确定各相位对应的每股车流所允许的最大排队长度;
17、s0-6)确定目标单点交叉口的通行特征参数:包括各相位在停车线断面的饱和流率。
18、优选地,所述的步骤s1,获取t时刻下目标单点交叉口的车辆数据,更新位于目标单点交叉口进口道的各车辆的累计延误,包括:
19、s1-1)为目标单点交叉口的各个进口分别布设一个相控阵雷达,建立进口道车辆检测系统,经过调整后,使每个进口的停车线、车道线分别与对应相控阵雷达坐标系中的x轴、y轴平行;获取进口道车辆检测系统于t时刻在目标单点交叉口检测到的车辆数据,该车辆数据包括进口道车辆检测系统为每辆车分配的id,以及该辆车的速度和位置;
20、s1-2)基于车辆速度数据更新进口道内每辆车的累计延误。
21、优选地,所述的步骤s2,获取目标单点交叉口的交通信号灯信息,判断t时刻是否属于方案更新阶段,如果是,则执行步骤s3-步骤s6,否则,根据上一方案更新阶段最后一个时刻基于遗传算法生成的最优配时方案,推算得到t+1时刻后的最优方案,执行步骤s6,包括:
22、s2-1)获取t时刻下的目标单点交叉口的交通信号灯信息,该交通信号灯信息包括各相位对应的灯色,该灯色已持续的时长,以及是否正在显示绿灯或者红灯的倒计时;
23、s2-2)方案更新阶段是指某相位绿灯启亮之后、显示绿灯倒计时之前的时间段,判断t时刻是否属于方案更新阶段,如果是,则执行步骤s2-4,否则,执行步骤s2-3;
24、s2-3)当t时刻不属于方案更新阶段时,根据上一方案更新阶段最后一个时刻基于遗传算法生成的最优配时方案,推算得到t+1时刻后的最优方案,执行步骤s6;
25、s2-4)当t时刻属于方案更新阶段时,继续进行步骤s3-步骤s6的处理过程,完成方案更新与信号灯控制。
26、优选地,所述的s2-1)获取t时刻下的目标单点交叉口的交通信号灯信息,该交通信号灯信息包括各相位对应的灯色,该灯色已持续的时长,以及是否正在显示绿灯或者红灯的倒计时,包括:
27、以tc代表绿灯倒计时的时长要求,δt表示数据获取频率,t时刻的不同交通信号灯信息对应的目标单点交叉口通行状态和方案更新与否的判断结果分为以下3种情况:
28、(1)某相位为绿灯状态,但信号灯尚未显示绿灯倒计时:该相位对应的车流拥有通行权,该时刻属于方案更新阶段,需要根据该时刻下的车辆数据对后续的信号配时进行更新;
29、(2)某相位为绿灯状态,且信号灯正在显示绿灯倒计时:该相位对应的车流拥有通行权,该时刻不属于方案更新阶段,当绿灯倒计时结束后,目标单点交叉口通行状态进入情况(3);
30、(3)无绿灯相位:所有相位的车流均无通行权,该时刻不属于方案更新阶段,且后续的信号配时方案已经确定。
31、6、根据权利要求4所述的方法,其特征在于,所述的步骤s3,将每股车流进行动态分段,分析t时刻下目标单点交叉口的各相位车流时空分布特征,包括:
32、s3-1)判断车辆类型:根据t时刻及其之前的交通流时空轨迹数据,以车辆速度等于0作为车辆到达目标单点交叉口的标志,将t时刻或t时刻之前速度等于0的车辆判定为到达车辆,其余车辆则为上游车辆;
33、s3-2)设置车流矩阵:根据车辆在t时刻的位置,遵循一对一原则,将所有车辆对应到进口道的具体单元格中;基于单元格匹配结果,针对每股车流,为其中的到达车流设置在进口道的位置矩阵map和延误矩阵mad,为其中的上游车流设置在进口道的位置矩阵mup和速度矩阵muv;四个矩阵的大小均为m行、n列,其中m=该车流对应的车道数量,n=研究范围内该车流所对应车道的长度/单元格长度,且第1列代表紧邻停车线的单元格;位置矩阵、速度矩阵和延误矩阵均初始化为0矩阵,若某个单元格中有车辆,则将该单元格所对应的位置矩阵中的元素更改为1,速度矩阵中的元素更改为该车辆的速度,延误矩阵中的元素更改为该车辆的累计延误;
34、s3-3)统计车辆到达:每股车流中最末尾的到达车辆与停车线之间的距离记为t时刻下的排队长度l0,将该车流中到达车辆的数量记为将该车流中到达车辆的累计延误之和记为l0、和的计算公式如下,其中lpcu表示单元格长度:
35、l0=max(ja)×lpcu (1)
36、ja(i,j)=pa(i,j)×j (2)
37、
38、
39、s3-4)划分上游车队:确定车队划分临界值lf,当两辆运动车辆之间的距离小于lf时,将两辆车归于同一个车队中;将上游车流位置矩阵中同一列元素对应的单元格合并为一个单元区域,计算出每个单元区域的车辆数量,并根据车辆数将该单元区域标记为“无车”、“有车”状态;若两个相邻单元区域的状态不同,则将这两个单元区域的分界线作为车流分段的备选分界线;若两条相邻备选分界线中间的区域为“无车状态”,且二者之间的距离小于lf时,删除这两条备选分界线;
40、s3-5)计算车队参数:将每个车队视为一个均匀整体,针对上游车流中第x个车队,用sx,1表示该车队的车头与停车线之间的距离,sx,2表示该车队的车尾与停车线之间的距离,qx、vx、kx、nx表示该车队的流量、速度、密度、车辆数,jx,1、jx,2表示该车队头车与尾车所在单元格对应的矩阵列下标,lpcu表示标准车辆占地空间,则车队相关参数计算公式如下:
41、sx,1=lpc u×(jx,1―1) (5)
42、sx,2=lpc u×jx,2 (6)
43、
44、
45、
46、优选地,所述的步骤s4,根据所述目标单点交叉口的各相位车流时空分布特征和各相位的约束条件,建立目标单点交叉口信号在线控制优化模型,包括:
47、s4-1)选取目标单点交叉口信号在线控制优化模型的决策变量和目标变量,取t时刻后的nk个时段,以k作为编号,用tk表示时段k的时长,表示相位i在时段k内的信号灯状态,表示绿灯;表示黄灯或红灯,以tk与作为决策变量;用d表示t时刻下检测到的所有进口道车辆在nk个时段中的累计延误之和,并以d作为目标变量;
48、s4-2)确定目标函数的表达式:
49、
50、其中,k表示时段集合,p表示相位集合,表示相位i在时段k内增加的延误,的计算与决策变量取值以及相位i在s3中的车流时空特征分析结果有关;
51、s4-3)确定约束条件:
52、
53、
54、
55、
56、
57、
58、
59、
60、
61、
62、
63、
64、1≤k≤nk,k∈z (24)
65、tk∈z+ (25)
66、
67、其中:(12)(13)为了符合信号配时方案的基本条件;(14)表示时段1中各相位的信号灯状态应与t时刻保持一致,代表相位i在t时刻下的信号灯状态;(15)表示若时段k中有相位处于绿灯状态,则tk至少需要大于绿灯倒计时的时长要求,tc代表绿灯倒计时的时长要求,δt表示数据获取频率;(16)(17)为了满足最小绿灯时间约束,g0代表t时刻下的绿灯相位,表示该相位已持续的绿灯时长,代表相位i的最小绿灯时间;(18)(19)为了满足最大红灯时间约束,r0代表t时刻下的红灯相位集合,(i∈r0)表示红灯相位截至t时刻已持续的红灯时长,代表相位i的最大红灯时间,m代表极大值;(20)为了满足绿灯间隔时间约束,i为一矩阵,i(i,j)表示绿灯相位从i切换至j所需的绿灯间隔时间;(21)为了保证所有t时刻检测到的进口道车辆均能在nk个时段中通过目标单点交叉口,代表相位i在t时刻检测到的进口道车辆数,表示相位i在时段k中通过目标单点交叉口的车辆数;(22)为了满足各相位的最大车均延误约束,代表相位i截至t时刻所累积的延误,代表相位i在时段k内累积的延误;(23)为了满足各相位对应车流的最大排队长度约束,表示相位i对应的车流m在时段k内的排队长度最大值,代表相位i对应的车流m的最大排队长度约束;(24)(25)(26)为变量取值。
68、优选地,所述的步骤s5,基于遗传算法求解所述目标单点交叉口信号在线控制优化模型,得到t+1时刻后的最优信号配时方案,包括:
69、s5-1)编码:为遗传算法的每个个体设置两条染色体,染色体ⅰ表示相序,染色体ⅱ表示对应的时长,两条染色体的长度均为np×nc,其中np为相位数量,且以1,2,,np作为相位编号,nc为预设的周期数量;染色体ⅰ的编码方式为:将1,2,,np×nc随机打乱顺序,再将当前绿灯相位的编号移至第一位;染色体ⅱ的编码方式为,随机生成np×nc个大于倒计时时长要求、小于60s的数;
70、s5-2)解码:在染色体ⅰ中,i、i+np、i+2×np,,i+(nc―1)×np表示编号为i的相位,根据该染色体中1,2,,np×nc的先后顺序,确定t时刻后各相位获得通行权的顺序;染色体ⅱ与染色体ⅰ相对应,表示为对应顺序的相位所分配的绿灯时间;若在染色体ⅰ中,出现多个表示同一相位的数字相邻的情况,则将其中首位数字的位置记为保留位,将后几个数字的位置记为删除位,并删除对应的数字,同时,将染色体ⅱ中对应删除位的几个数字加至保留位并删除,作为为该相位分配的绿灯时间;
71、s5-3)计算适应度:根据解码后的配时方案,计算在该方案下信号控制优化模型的目标函数值d;检验各约束条件是否满足,若存在约束条件j不被满足,则计算出相应的惩罚值ej;适应度的计算公式如下:
72、
73、s5-4)判断终止条件:设置迭代次数,作为终止条件;
74、s5-5)选择:剔除群体中适应度排在后三分之一的个体;
75、s5-6)交叉:选出适应度排在前三分之一的个体,令个体两两配对进行交叉;染色体ⅰ和染色体ⅱ同步交叉,且每次交叉得到两个新个体;
76、s5-7)变异:保留适应度排在前30的个体,其余个体按照一定概率发生变异;变异有两种类型,一种是任选两个相位调换其相序,另一种是任选一个相位,使其绿灯时长在50%-150%之间随机变化;当某个体需要发生变异时,按照两种变异类型分别生成一定数量的后代,并从中选择适应度最高的后代作为该个体变异的结果;
77、s5-8)确定t+1时刻后的最优信号配时方案,该最优信号配时方案包括,当前绿灯相位在t+1时刻的剩余绿灯时间tg_after(t+1),下一绿灯相位pg_next的选择,以及为下一绿灯相位设定的绿灯时间初始值tg_next;在迭代终止后,选择适应度最大的个体,对其进行解码,分别取染色体ⅱ中的第一位数字、第二位数字作为tg_after(t+1)和tg_next,取染色体ⅰ中第二位数字所对应的相位作为pg_next;。
78、优选地,所述的步骤s6,根据t+1时刻后的最优信号配时方案控制目标单点交叉口的交通信号灯,包括:
79、s6-1)在最后求出的最优信号配时方案中,若t0>tc+δt,判断在t+1时刻不显示倒计时,并在获取t+1时刻的车辆数据后,重复执行步骤s1-s6;
80、s6-2)在最后求出的最优信号配时方案中,若t0=tc+δt,判断在t+1时刻开始显示倒计时,并按该方案控制交通信号灯,直至下一绿灯相位的绿灯启亮时刻。
81、由上述本发明的实施例提供的技术方案可以看出,本发明方法可以实现对目标单点交叉口实时交通状况的全面分析,满足驾驶员对信号灯倒计时的需求,同时使信号控制决策与交通需求相匹配,进而保障通行权的公平分配,提高目标单点交叉口时空资源的利用率。
82、本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187630.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表