巡检机器人及巡检方法与流程
- 国知局
- 2024-07-31 20:44:09
本公开至少涉及机器人,尤其涉及一种巡检机器人以及巡检方法。
背景技术:
1、为保证对通讯机房内部设施进行实时监测,以防止设备的漏水、漏电、火灾、设备异常等状况无法被及时发现,机房内需要配置移动式巡检机器人。
2、在通讯机房内,多种设备通过柜体进行设置,柜体具有一定的高度,因此在进行监测作业时,监测装置只能收集到柜体上部位置的数据,例如在拍摄时,只能拍摄到柜体顶部位置的画面信息,当较低处有异常时,其画面数据难以获取到,导致监测范围有限,监测效果不佳。
技术实现思路
1、本公开所要解决的技术问题是针对上述不足,提供一种巡检机器人以及巡检方法,以解决在机房场景下如何控制巡检机器人巡检的问题。
2、第一方面,本公开提供一种巡检机器人,包括:
3、监测模组,用于获取巡检信息;
4、升降组件,与监测模组连接,用于带动监测模组升降;
5、车体,与升降组件连接,用于带动升降组件和监测模组沿轨道行走;
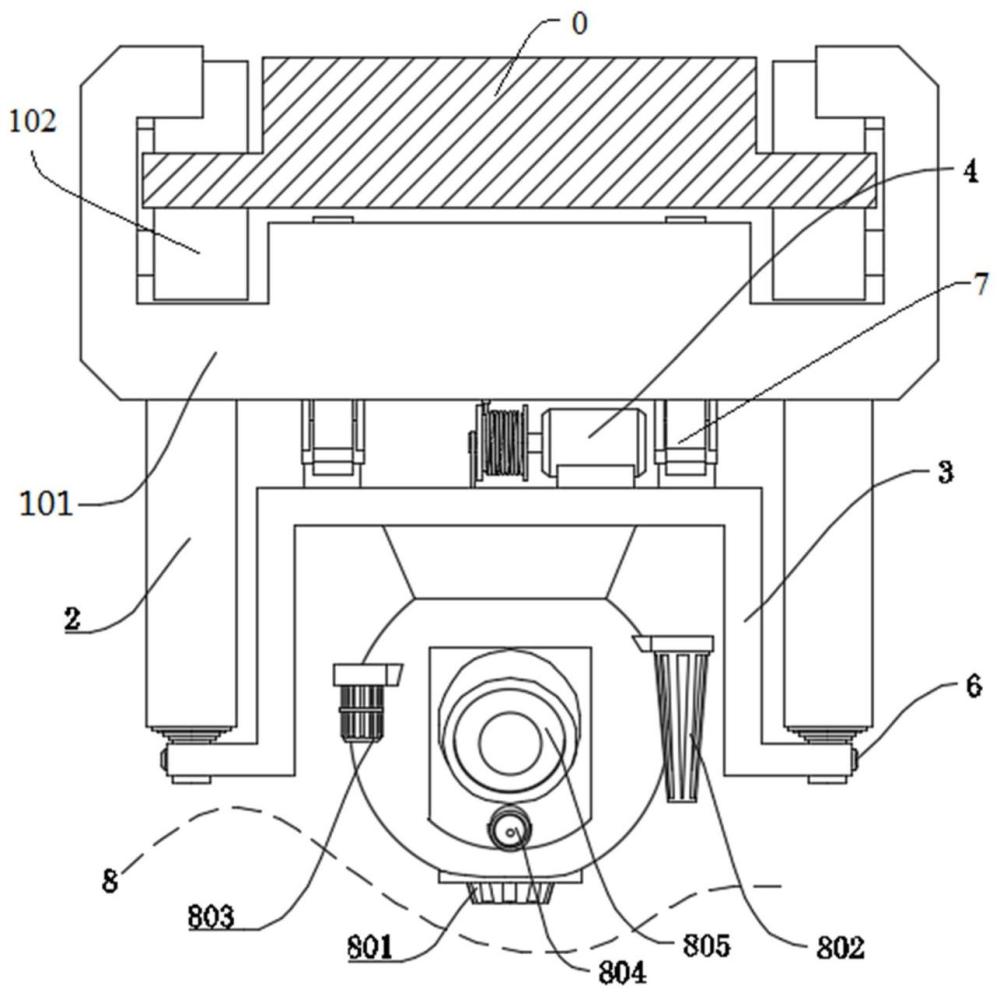
6、限位组件,与车体转动连接、与升降组件可接触连接、与轨道可限位连接,用于在升降组件上升至最大位置时,与升降组件接触,在接触作用下,沿车体转动至解除车体在轨道上的行走限位,以及在升降组件处于下降时,与升降组件不接触,在不接触作用下,沿车体转动至实现车体在轨道上的行走限位。
7、进一步地,限位组件具体采用多组,每组限位组件具体包括:
8、抵触架,包括横杆和竖杆,呈l型,竖杆顶端穿过车体至可接触轨道;
9、转动轴孔,设置在横杆中部,用于穿过转动轴,以转动连接车体;
10、弹簧件,设置在横杆末端,用于在升降组件上升至最大位置时,横杆末端与升降组件接触,弹簧件被压紧,并带动抵触架沿转动轴转动至使竖杆顶端不接触轨道,以解除车体在轨道上的行走限位,以及在升降组件处于下降时,横杆末端与升降组件不接触,弹簧件推动抵触架沿转动轴转动至使竖杆顶端接触并压紧轨道,以实现车体在轨道上的行走限位。
11、进一步地,车体具体包括:
12、车体主体,包括两个车体侧壁和一个车体底壁,呈u型;
13、滚轮,两个车体侧壁的内侧上下共设置四排滚轮,分别接触轨道两侧的上下面;
14、转动轴安装部件,设置在车体底壁的下面,用于安装转动轴以连接限位组件,且车体底壁上设置有通孔,用于限位组件的竖杆顶端穿过车体底壁至可接触轨道。
15、进一步地,升降组件具体包括:
16、升降台,下部固定连接监测模组,且顶部有凸出的触点,触点用于实现与限位组件的横杆末端接触;
17、升降件,与升降台连接,用于带动升降台和监测模组升降。
18、进一步地,升降件具体包括:
19、多根伸缩杆,每根伸缩杆包括多节套设的杆体,伸缩杆的一端竖直连接在车体底壁的下面,伸缩杆的另一端连接升降台;
20、收卷件,包括伺服电机、收卷轮和吊绳,伺服电机用于带动收卷轮转动以收卷吊绳,吊绳的一端连接收卷轮,伺服电机和吊绳的另一端之一连接升降台,吊绳的另一端和伺服电机之一连接车体底壁的下面。
21、进一步地,伸缩杆内部穿过电线,电线连接监测模组,用于为监测模组供电。
22、进一步地,伸缩杆具体采用四根,且最外层杆体与车体主体一体构造,最内层杆体下部设置贯穿孔,用于穿过贯穿螺栓,以可拆卸连接升降台,升降台呈倒u型,监测模组连接在倒u型的凹陷内,伸缩杆和贯穿螺栓连接在倒u型底部向外突出的边缘。
23、进一步地,监测模组具体包括:
24、烟感模块、温湿度模块、燃气报警模块、热成像测温模块以及电机摄像头模块。
25、进一步地,电机摄像头模块连接升降组件,烟感模块、温湿度模块、燃气报警模块和热成像测温模块连接在电机摄像头模块上,热成像测温模块的测温面与电机摄像头模块的摄像面朝向相同。
26、第二方面,本公开提供一种巡检方法,所述方法应用于如上所述的巡检机器人,所述方法包括:
27、控制车体停止沿轨道行走后,启动升降组件控制监测模组升降,在升降组件不位于上升的最大位置时,限位组件实现车体在轨道上的行走限位。
28、本公开提供一种巡检机器人以及巡检方法,通过升降组件带动监测模组升降,以实现监测模组获取多高度的巡检信息,从而提高了监测范围,同时通过限位组件实现监测模组下降时整体的行走限位,保证了监测作业效果。
技术特征:1.一种巡检机器人,其特征在于,包括:
2.根据权利要求1所述的巡检机器人,其特征在于,限位组件具体采用多组,每组限位组件具体包括:
3.根据权利要求2所述的巡检机器人,其特征在于,车体具体包括:
4.根据权利要求3所述的巡检机器人,其特征在于,升降组件具体包括:
5.根据权利要求4所述的巡检机器人,其特征在于,升降件具体包括:
6.根据权利要求5所述的巡检机器人,其特征在于,伸缩杆内部穿过电线,电线连接监测模组,用于为监测模组供电。
7.根据权利要求5所述的巡检机器人,其特征在于,伸缩杆具体采用四根,且最外层杆体与车体主体一体构造,最内层杆体下部设置贯穿孔,用于穿过贯穿螺栓,以可拆卸连接升降台,升降台呈倒u型,监测模组连接在倒u型的凹陷内,伸缩杆和贯穿螺栓连接在倒u型底部向外突出的边缘。
8.根据权利要求1-7任一项所述的巡检机器人,其特征在于,监测模组具体包括:
9.根据权利要求8所述的巡检机器人,其特征在于,电机摄像头模块连接升降组件,烟感模块、温湿度模块、燃气报警模块和热成像测温模块连接在电机摄像头模块上,热成像测温模块的测温面与电机摄像头模块的摄像面朝向相同。
10.一种巡检方法,其特征在于,所述方法应用于如权利要求1-9任一项所述的巡检机器人,所述方法包括:
技术总结本公开提供一种巡检机器人及巡检方法,涉及机器人技术领域,用于解决在机房场景下如何控制巡检机器人巡检的问题,所述巡检机器人,包括:监测模组,用于获取巡检信息;升降组件,与监测模组连接,用于带动监测模组升降;车体,与升降组件连接,用于带动升降组件和监测模组沿轨道行走;限位组件,与车体转动连接、与升降组件可接触连接、与轨道可限位连接,用于在升降组件上升至最大位置时,与升降组件接触,在接触作用下,沿车体转动至解除车体在轨道上的行走限位,以及在升降组件处于下降时,与升降组件不接触,在不接触作用下,沿车体转动至实现车体在轨道上的行走限位。本公开可以提高监测范围,同时保证监测作业效果。技术研发人员:董志权受保护的技术使用者:中国联合网络通信集团有限公司技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240731/187627.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表