-
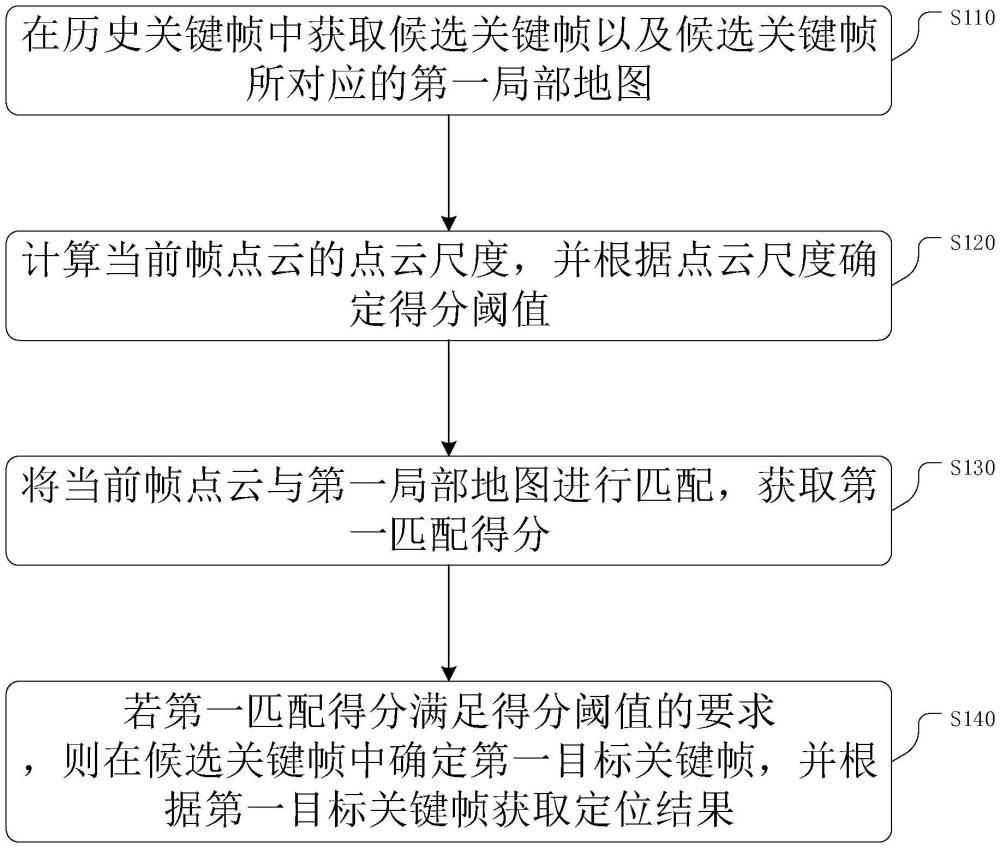
一种重定位方法、装置、机器人及存储介质与流程
本技术涉及机器人定位,具体而言,涉及一种重定位方法、装置、机器人及存储介质。背景技术:1、机器人重定位是指在机器人执行任务的过程中,对机器人当前的位置和姿态进行重新定位和调整的一种技术。重定位技术可以......
-
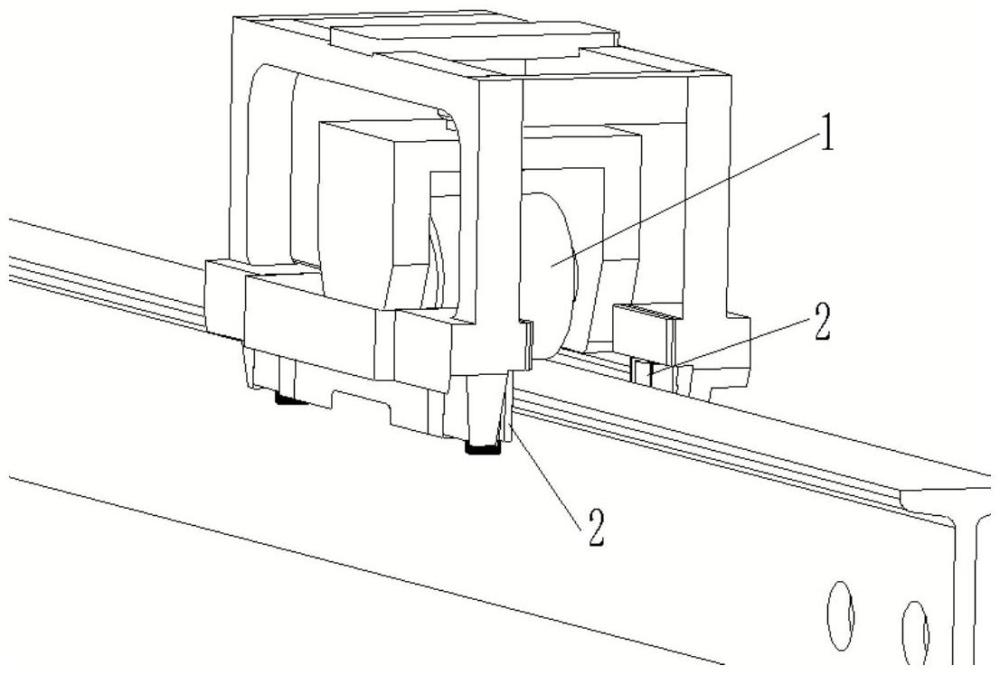
杆塔防坠导轨的卡阻纠偏结构、机器人及卡阻纠偏方法与流程
本发明属于电力防坠导轨巡检领域,尤其涉及一种杆塔防坠导轨的卡阻纠偏结构、机器人及卡阻纠偏方法。背景技术:1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。2、杆塔防坠导轨的状......
-
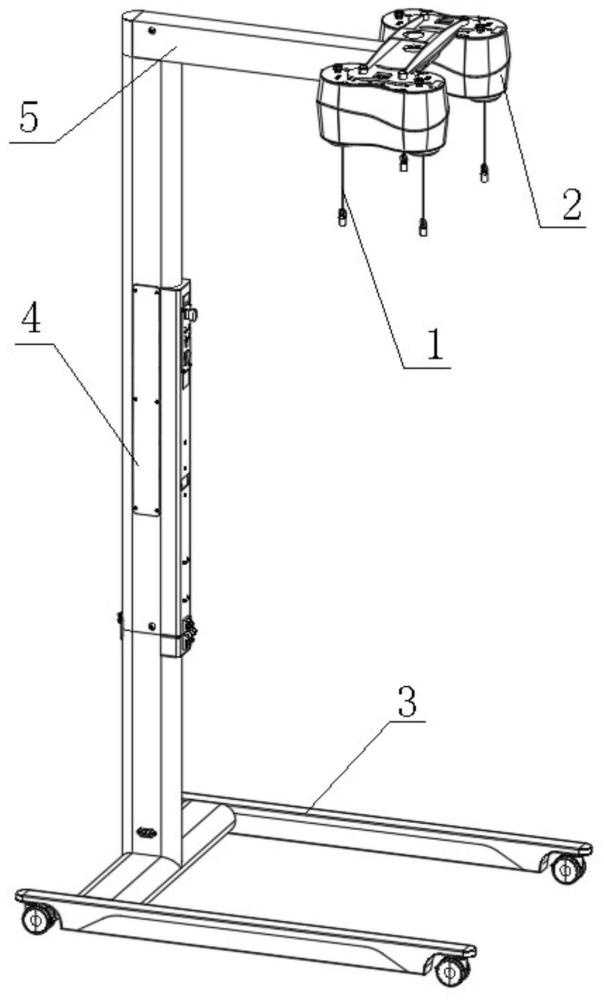
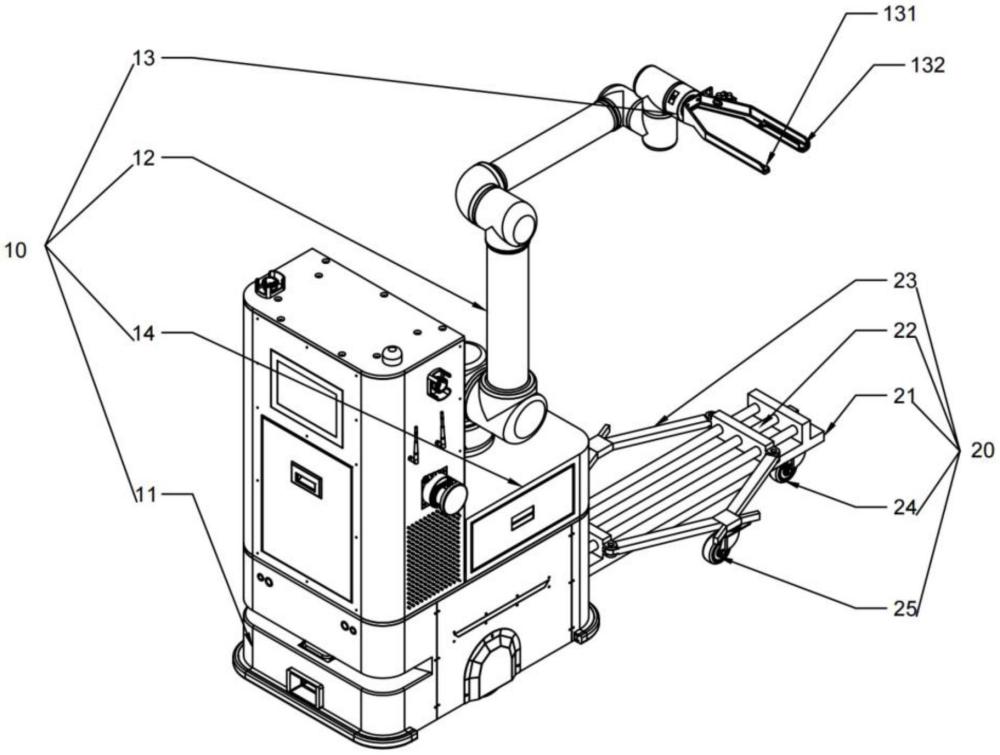
一种上肢训练机构、康复机器人及训练方法与流程
本发明属于上肢训练,具体涉及一种上肢训练机构、康复机器人及训练方法。背景技术:1、近年来,脑卒中患病率逐年增高。根据世界卫生组织(who)调查,每年有超过1500万人患中风或者脑血管疾病。临床学证据指......
-

一种用于建筑施工的防水卷材自动铺设机器人及铺设方法与流程
本发明涉及建筑施工机器人,具体为一种用于建筑施工的防水卷材自动铺设机器人及铺设方法。背景技术:1、防水卷材是一种主要用于建筑墙体、屋面、隧道、公路等地方,以抵御外界雨水和地下水渗漏的柔性建材产品。它作......
-
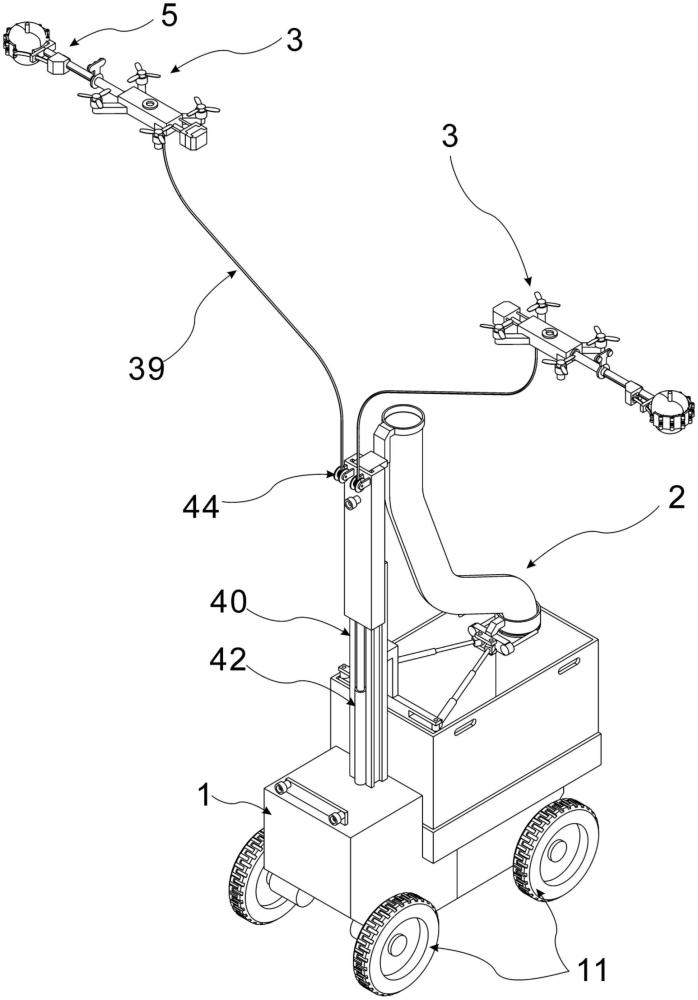
一种农保机器人及控制方法与流程
本发明涉及智能机器人,特别涉及一种农保机器人及控制方法。背景技术:1、采用机器人进行工业和农业的应用,具有极大的应用前景,特别是在农业种植和采摘方面,已成为世界现代农业发展的趋势。果实机械化采收一直是......
-

基于镂空障碍物的避障方法、装置、机器人及存储介质与流程
本发明涉及机器人领域,尤其涉及一种基于镂空障碍物的避障方法、装置、机器人及存储介质。背景技术:1、随着激光雷达技术的发展,在移动机器人上安装线激光发射器,配合以相应的红外摄像头,不仅使得移动机器人能够......
-
一种修复光伏组件用镀膜机器人及镀膜方法与流程
本发明涉及光伏组件镀膜,具体为一种修复光伏组件用镀膜机器人及镀膜方法。背景技术:1、随着全球对可再生能源需求的不断增加,光伏发电技术作为清洁能源的代表之一,其市场规模及应用领域不断扩大。光伏组件,作为......
-
一种协动式管道校装机器人及其校装方法与流程
本发明涉及校装机器人领域,尤指一种协动式管道校装机器人及其校装方法。背景技术:1、管道作为基建的基础设施频繁应用于各种复杂环境中,比如建筑物内部、工业厂房、市政道路、地下综合管廊和住宅小区等区域,但应......
-
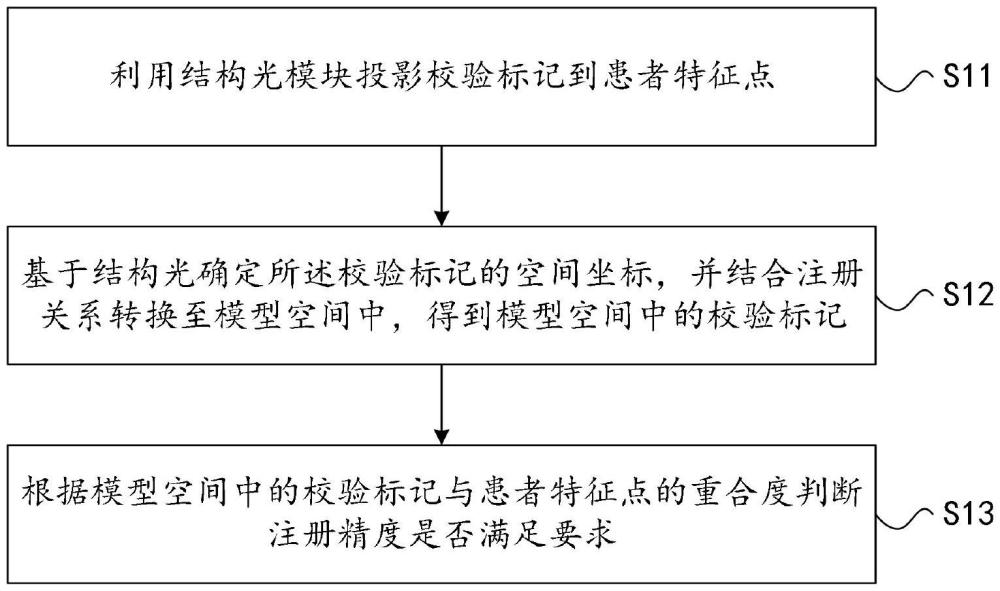
注册精度验证方法、手术机器人及手术导航系统与流程
本发明涉及医疗器械,尤其涉及一种注册精度验证方法、手术机器人及手术导航系统。背景技术:1、注册是建立真实空间与患者模型空间的映射关系的过程,注册精度直接影响了手续手术导航、手术操作的精度。在通过骨性标......
-
基于压电陶瓷内置的小型压电机器人及机器人可重构构型
本发明涉及可重构机器人,具体为一种基于压电陶瓷内置的小型压电机器人及机器人可重构构型。背景技术:1、近年来,随着空间应用与未知环境探索需求的不断增长,对可重构机器人的环境适应性和模块尺寸提出了更为严苛......
-

一种基于人工智能的分拣搬运机器人及控制方法与流程
本发明涉及分拣搬运机器人控制,具体涉及一种基于人工智能的分拣搬运机器人及控制方法。背景技术:1、分拣机器人(sorting robot),是一种具备了传感器、物镜和电子光学系统的机器人,可以快速进行货......
-
一种杆塔防坠导轨验收机器人及方法与流程
本发明属于防坠导轨检测领域,尤其涉及一种杆塔防坠导轨验收机器人及方法。背景技术:1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。2、目前防坠导轨状态检测技术在新安装防坠导轨......
-
用于立体仓库的轨道机器人及智能仓储系统的制作方法
本技术涉及仓储设备,特别是涉及一种用于立体仓库的轨道机器人及智能仓储系统。背景技术:1、在现代商业活动、工业活动及居民生活服务领域中,储存和管理大量不同尺寸和种类繁多的物品是一项重要需求。这些物品具有......
-
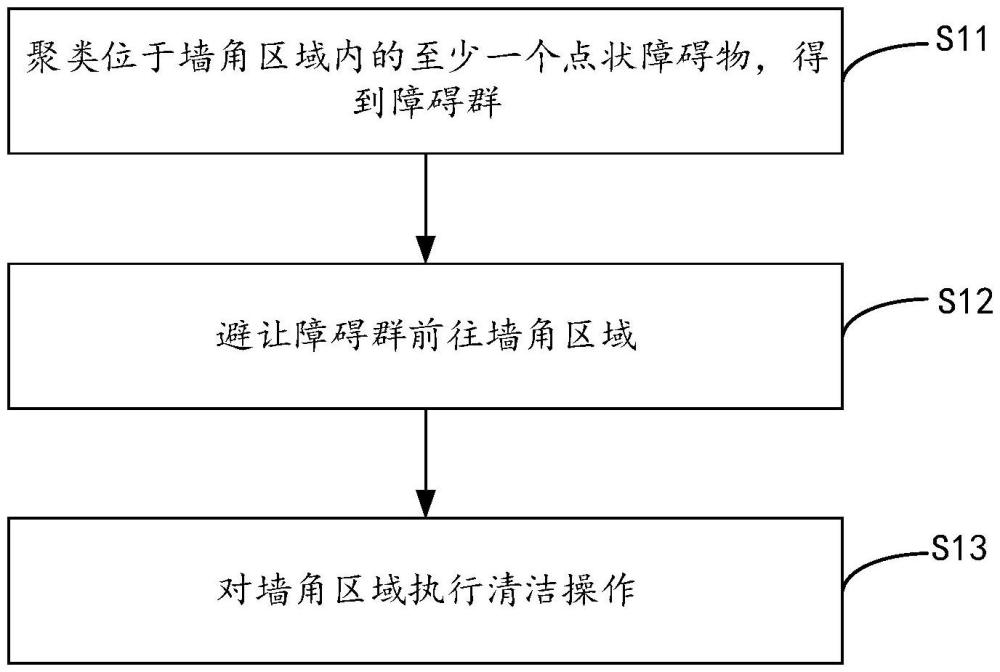
墙角清洁方法、机器人及计算机可读存储介质与流程
本申请实施例涉及机器人,尤其涉及一种墙角清洁方法、机器人及计算机可读存储介质。背景技术:1、相关技术提供的机器人对清洁区域进行清洁时,先沿着清洁区域的墙体边沿清洁一周后,再按照弓字形路径对清洁区域的中......
-
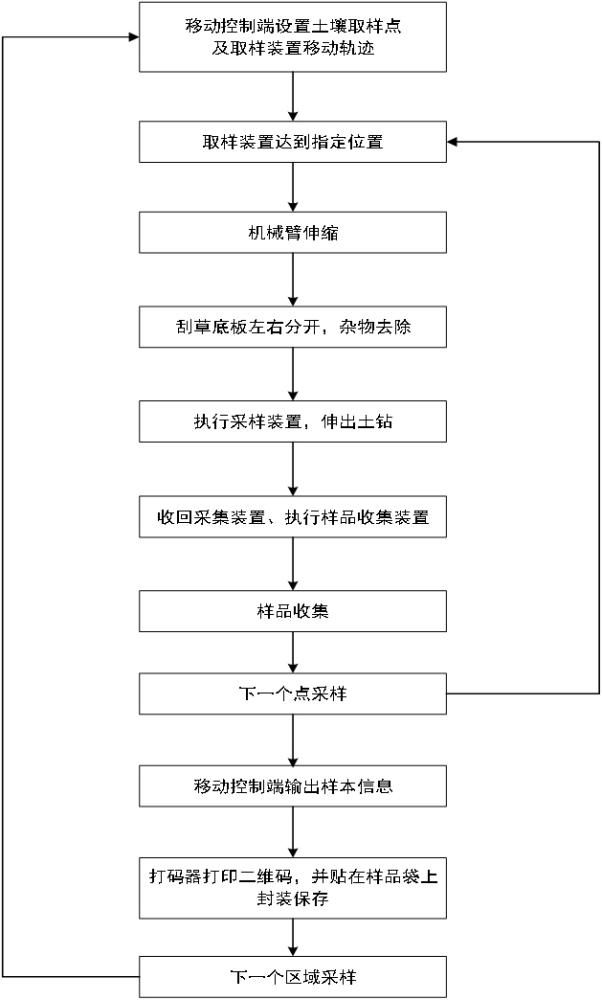
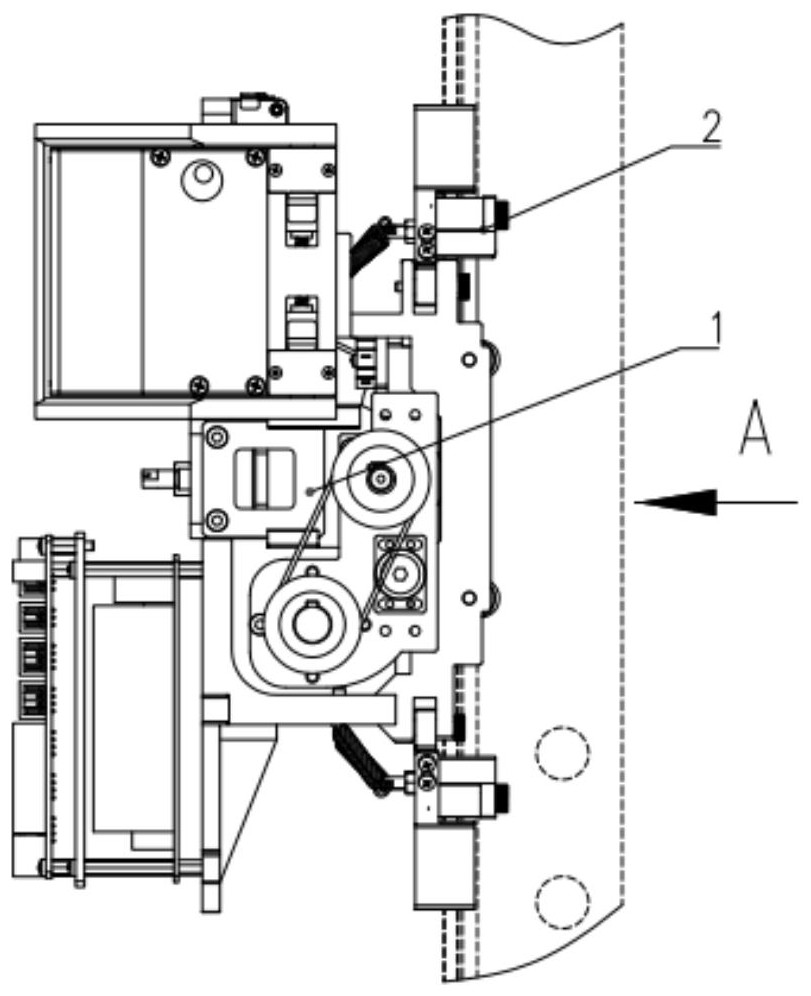
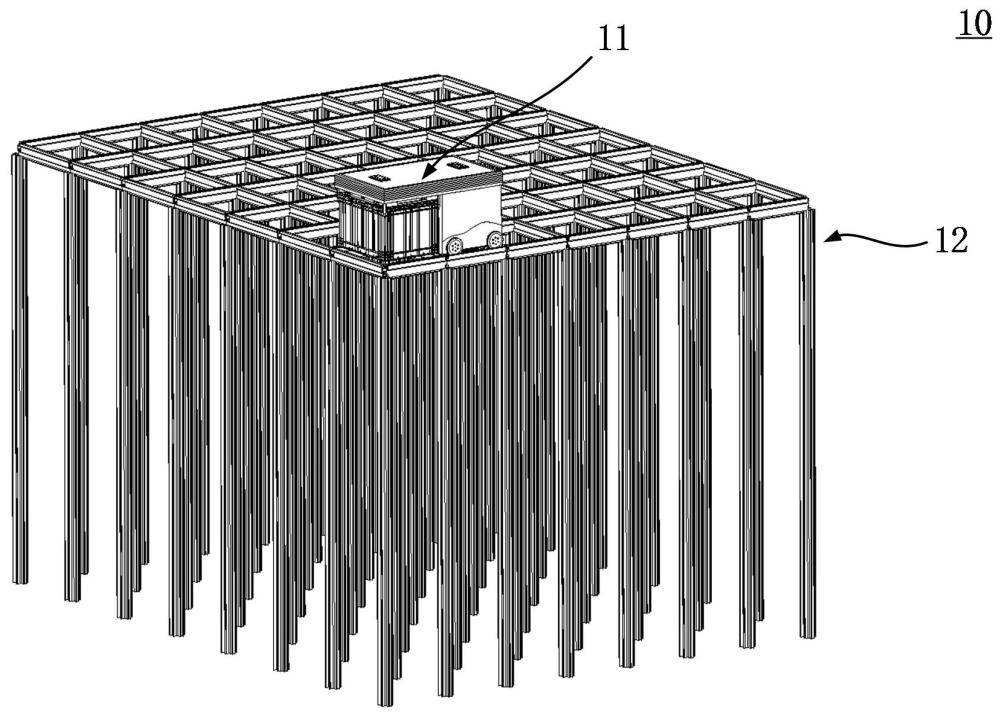
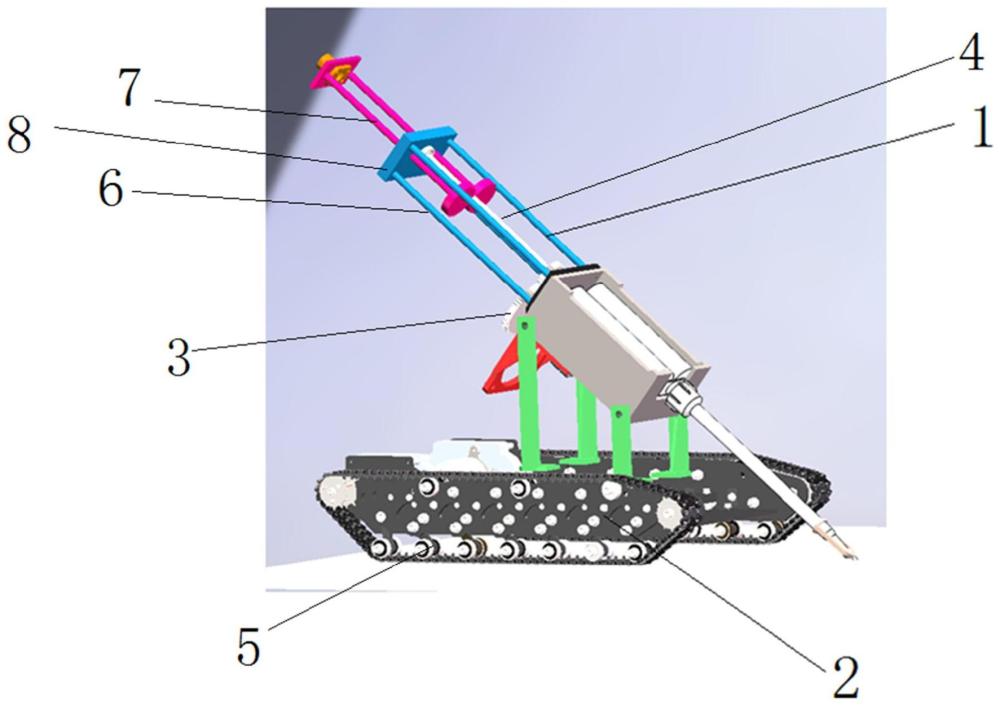
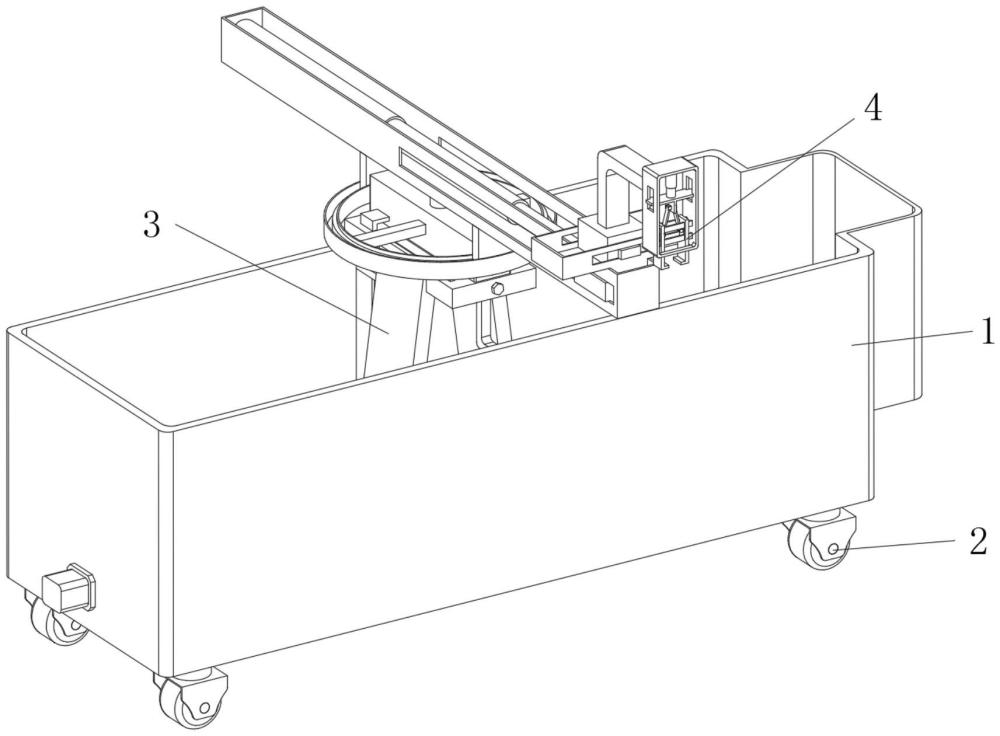
一种土壤快速采样机器人及土壤采样方法与流程
本发明涉及一种土壤快速采样机器人及土壤采样方法,属于土壤采集。背景技术:1、土壤是人类赖以生存的重要自然资源,事关粮食安全、生态安全。土壤是人类农业生产基地,在植物生长繁育过程中,土壤能够将养分转化和......
-

一种抱夹式AGV搬运台车机器人及停车设备的制作方法
本技术涉及停车设备,尤其涉及一种抱夹式agv搬运台车机器人及停车设备。背景技术:1、随着城市汽车保有量的日益增长,停车难问题已经成为了城市中的普遍问题,严重阻碍着城市发展。立体车库成为大众的停车选择。......
-
一种基于视觉导向的智能美缝机器人及方法
本发明涉及工业机器人,特别涉及一种基于视觉导向的智能美缝机器人及方法。背景技术:1、本部分的陈述仅仅是提供了与本发明相关的背景技术,并不必然构成现有技术。2、贴瓷砖是装修行业几乎必备的一个步骤,考虑到......
-
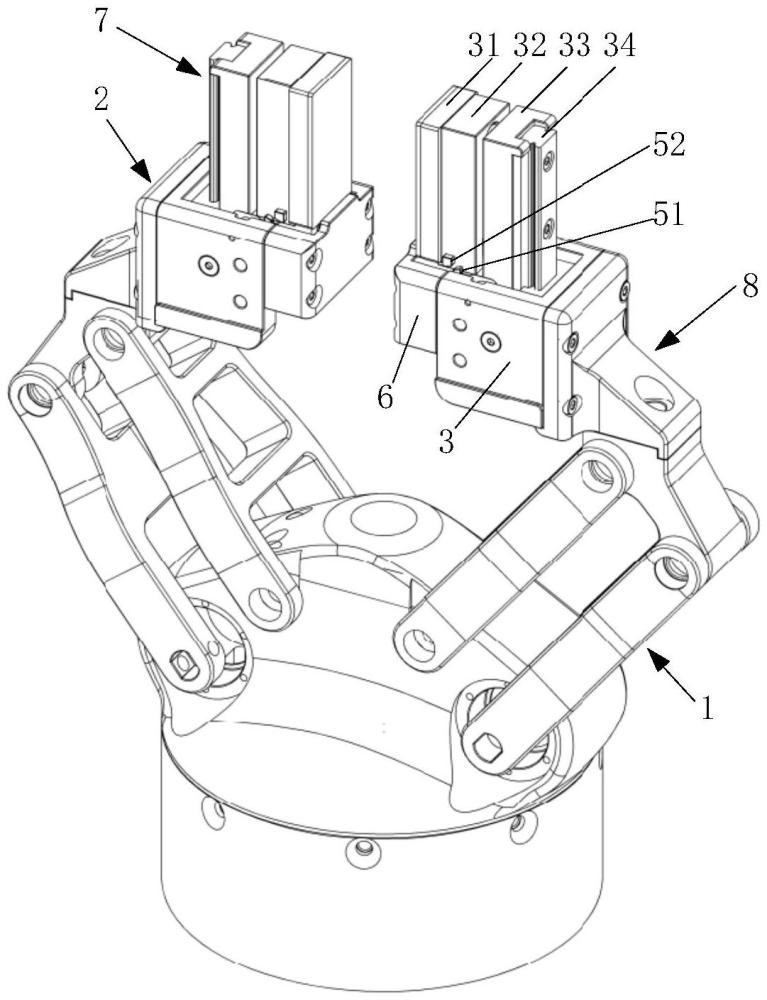
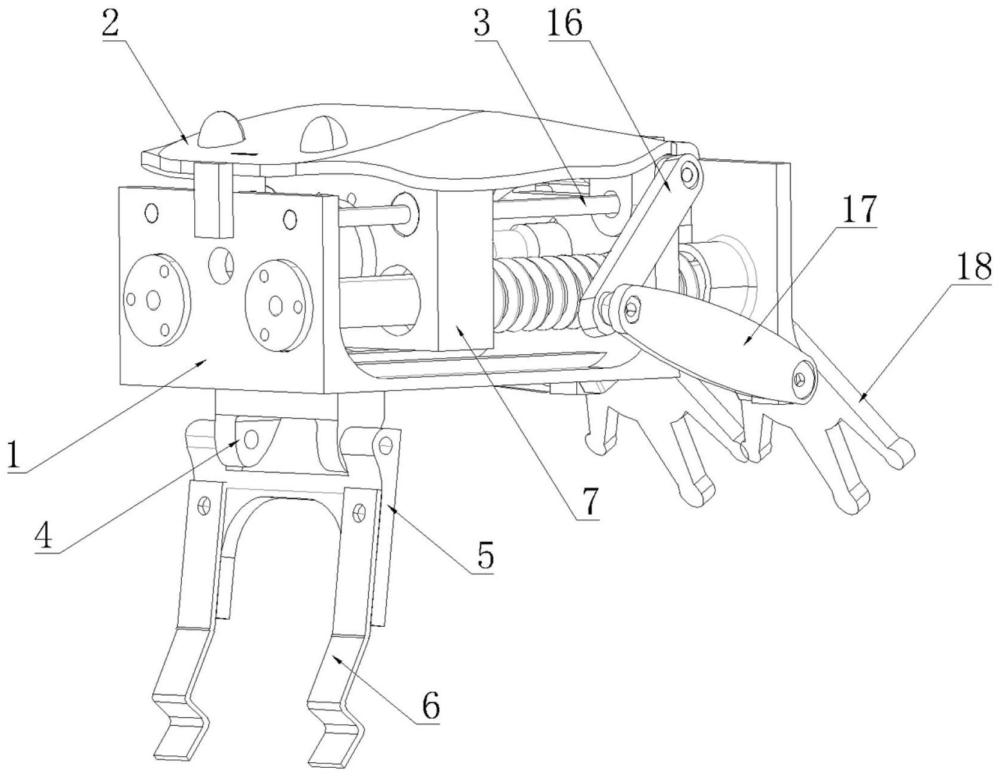
用于推入物料的自适应夹指、机器人及夹持与推进方法与流程
本发明涉及机械领域,具体地,涉及一种用于推入物料的自适应夹指、机器人及夹持与推进方法。背景技术:1、在装配等工业领域的自动化生产过程中,工业机器人末端会使用夹爪结构的执行器实现对工件的夹取、抓取、搬运......
-
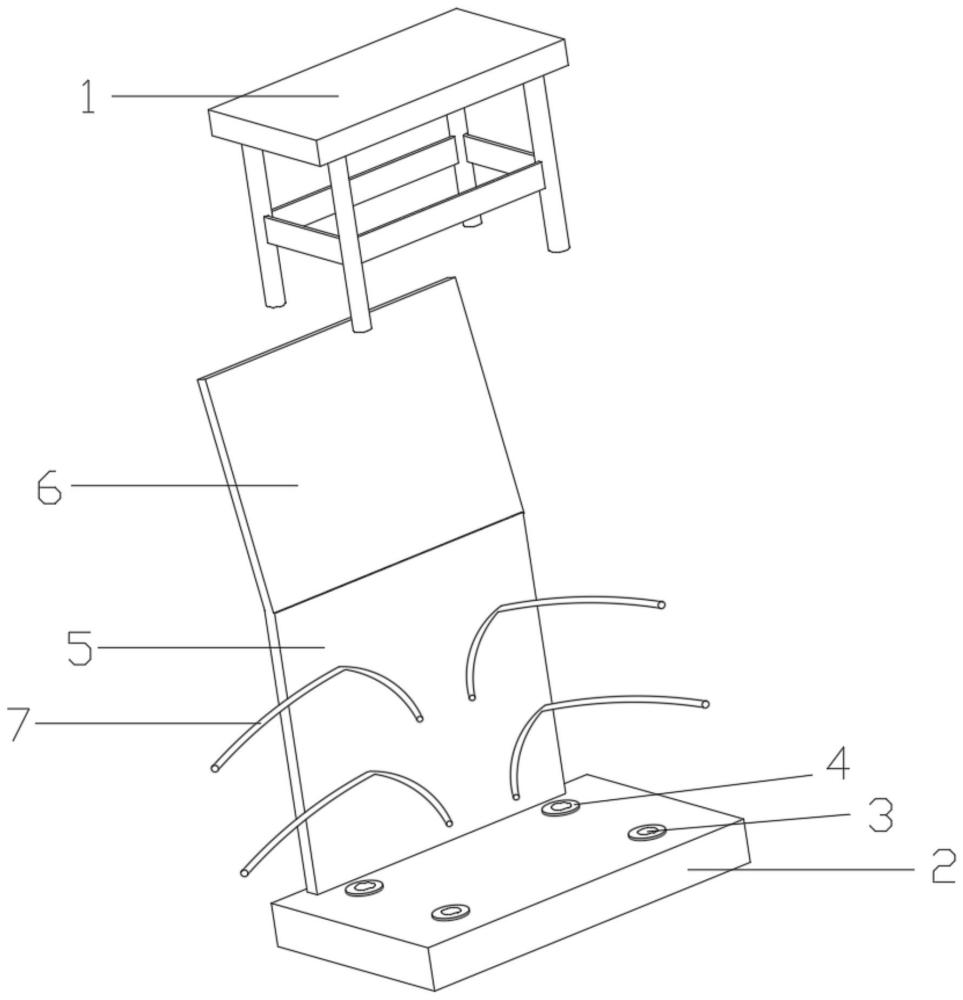
一种方便老年人及行动不便人员就诊稳坐的辅助座椅的制作方法
本技术涉及医用辅助装置,特别涉及一种方便老年人及行动不便人员就诊稳坐的辅助座椅。背景技术:1、现有的医院门诊室的诊疗座椅以方凳为主,老年人以及行动不便的患者在使用前,常常出现畏惧摔倒的心理而不愿坐下,......
-
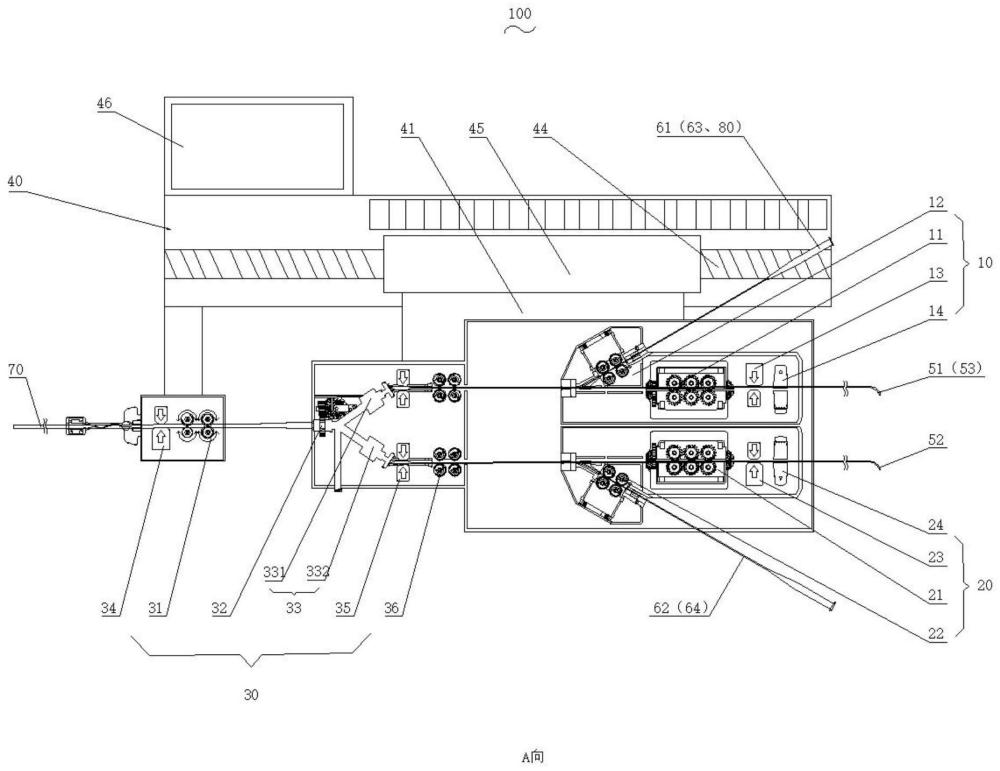
一种冠脉介入手术机器人及控制方法与流程
本发明属于医疗机器人领域,应用于主从式血管介入手术机器人,尤其涉及一种冠脉介入手术机器人及控制方法。背景技术:1、介入手术作为目前心脑血管疾病的主要治疗方式,具有创伤小、疼痛少、并发症少等特点。在传统......
-
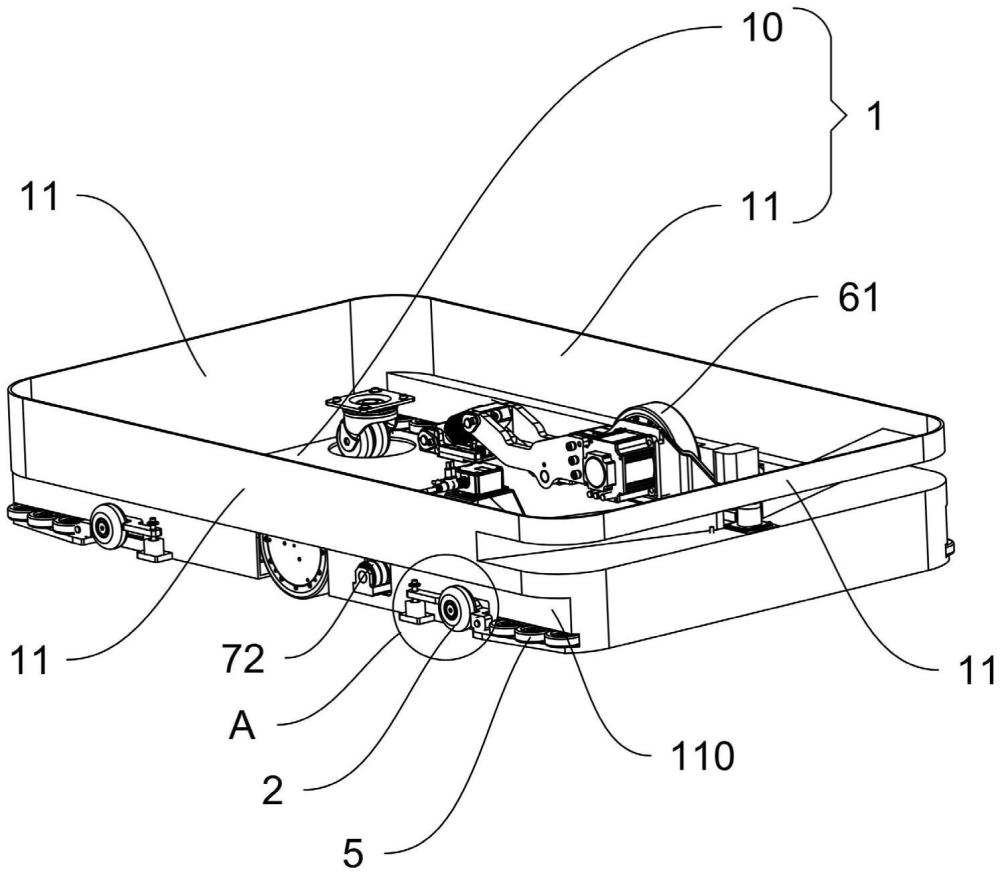
一种移动底盘、移动机器人及搬运系统的制作方法
本申请涉及仓储系统,具体涉及一种移动底盘、移动机器人及搬运系统。背景技术:1、移动机器人常应用至仓储系统中用于取放搬运料箱,相关技术中的移动机器人一般包括移动底盘、设置于移动底盘上的立柱以及设置于立柱......
-
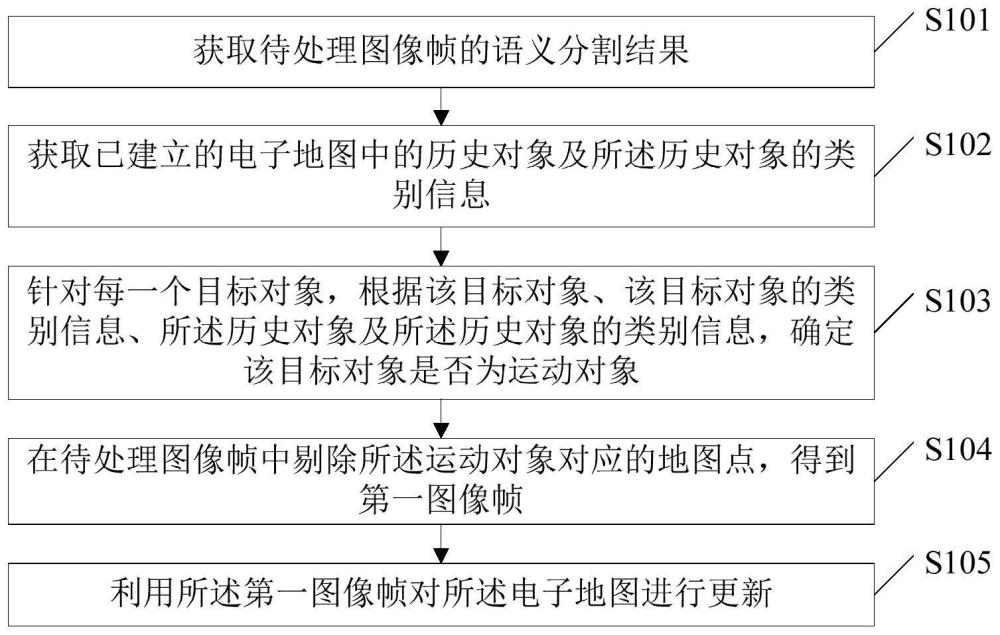
一种电子地图更新方法、装置、机器人及存储介质与流程
本技术涉及机器视觉,特别是涉及一种电子地图更新方法、装置、机器人及存储介质。背景技术:1、机器人的精准应用依赖于实时地图的及时更新,例如,扫地机器人的清扫地图更新及时,有益于扫地机器人灵活避让障碍物、......
-
一种救援机器人及救援系统的制作方法
本发明涉及机器人,尤其是指一种救援机器人及救援系统。背景技术:1、移动机器人是一种能够自主移动并开展业务的机器人。其在工业制造,物流仓储,医疗领域,服务行业以及现代农业等领域的应用越来越广泛。移动机器......
-
一种火车摘钩机器人及摘钩方法与流程
本发明涉及火车摘钩,尤其是涉及一种火车摘钩机器人及摘钩方法。背景技术:1、所谓摘钩是指将货车的车厢之间所连接的车钩进行摘解的工作,其中车钩与连接设备是列车的重要组成部分之一,其必需具有足够的强度承担整......
-
一种高性能仿生青蛙跳跃机器人及控制方法
本发明属于仿生机械的,具体公开了一种高性能仿生青蛙跳跃机器人及控制方法。背景技术:1、随着人类探索地球的深入,可代替人类在恶劣条件下完成相关任务的仿生机器人渐渐成为机器人研制的热点,因而研制一种活动范......
技术新讯 > 人及 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
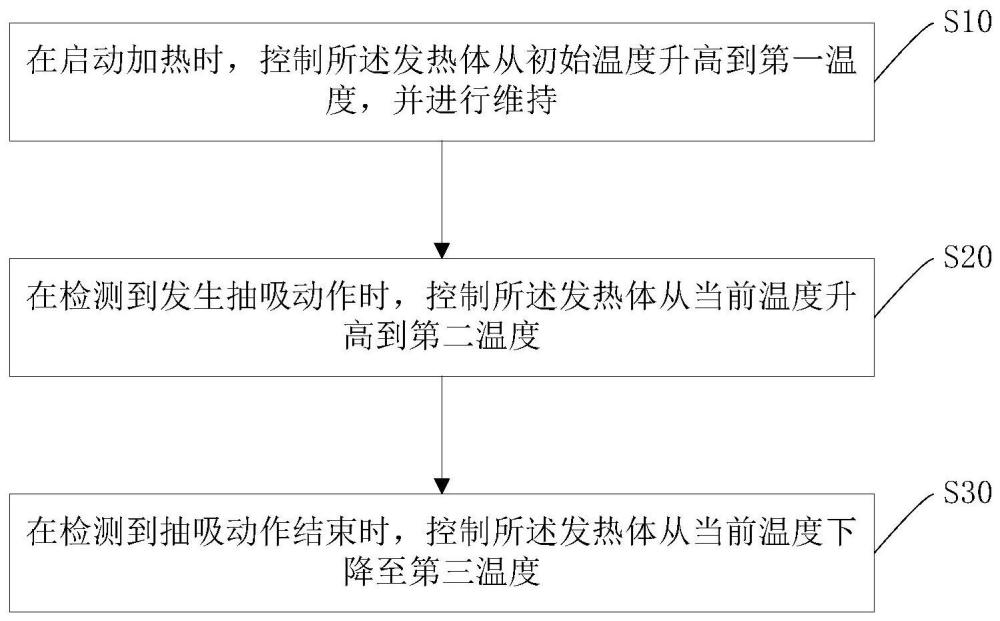
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19