墙角清洁方法、机器人及计算机可读存储介质与流程
- 国知局
- 2024-09-05 15:03:39
本申请实施例涉及机器人,尤其涉及一种墙角清洁方法、机器人及计算机可读存储介质。
背景技术:
1、相关技术提供的机器人对清洁区域进行清洁时,先沿着清洁区域的墙体边沿清洁一周后,再按照弓字形路径对清洁区域的中间部分进行清洁。当墙角区域存在凳子等小障碍物时,凳子的凳脚较小,在栅格地图中只占据较少栅格,在地图处理过程中容易直接忽略凳脚此类小障碍物,如此导致机器人前往墙角区域进行清洁时容易与小障碍物发生碰撞,如此容易损坏机器人。
技术实现思路
1、本申请实施例的一个目的旨在提供一种墙角清洁方法、机器人及计算机可读存储介质,以解决相关技术提供的机器人在清洁墙角区域时容易与障碍物发生碰撞的技术问题。
2、在第一方面,本申请实施例提供一种墙角清洁方法,应用于机器人,包括:
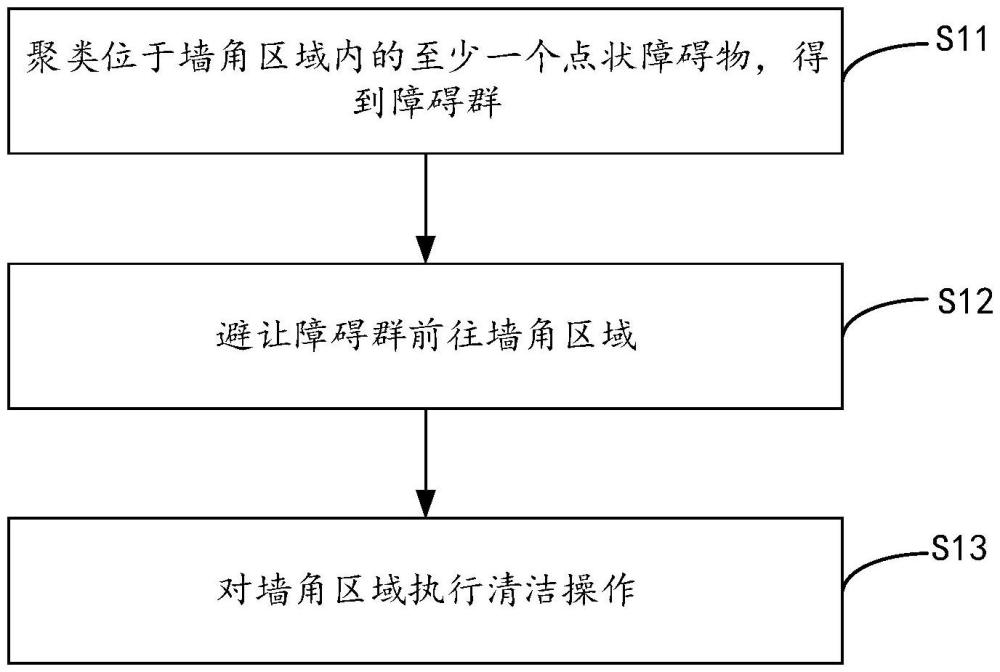
3、聚类位于墙角区域内的至少一个点状障碍物,得到障碍群;
4、避让所述障碍群前往所述墙角区域;
5、对所述墙角区域执行清洁操作。
6、可选地,所述聚类位于墙角区域内的至少一个点状障碍物,得到障碍群包括:
7、获取清洁地图,所述清洁地图包括至少一个清洁区域;
8、确定所述清洁区域的墙角;
9、以所述墙角为基准点,创建指定尺寸的墙角区域;
10、对位于所述墙角区域内的至少一个点状障碍物进行聚类,得到障碍群。
11、可选地,所述确定所述清洁区域的墙角包括:
12、提取所述清洁区域的第一最大轮廓,所述第一最大轮廓包括多个轮廓点;
13、确定满足预设墙角条件的轮廓点为墙角。
14、可选地,所述以所述墙角为基准点,创建指定尺寸的墙角区域包括:
15、获取第一墙角线段与第二墙角线段,所述第一墙角线段与所述第二墙角线段相交于所述墙角,所述第一墙角线段的尺寸与所述第二墙角线段的尺寸都为指定尺寸;
16、以所述墙角为顶点、所述第一墙角线段为第一边长及所述第二墙角线段为第二边长,创建矩形的墙角区域。
17、可选地,所述对位于所述墙角区域内的至少一个点状障碍物进行聚类,得到障碍群包括:
18、查找位于所述墙角区域内的至少一个点状障碍物;
19、根据预设聚类算法对至少一个所述点状障碍物进行聚类,得到障碍群。
20、可选地,所述避让所述障碍群前往所述墙角区域包括:
21、确定所述墙角区域的墙角行走路径;
22、沿着所述墙角行走路径避让所述障碍群前往所述墙角区域。
23、可选地,所述确定所述墙角区域的墙角行走路径包括:
24、获取清洁地图,所述清洁地图包括至少一个清洁区域;
25、确定内层轮廓,所述内层轮廓为在所述清洁区域内,分别与所述清洁区域的第一最大轮廓和所述障碍群的第二最大轮廓间隔目标宽度的轮廓;
26、对所述内层轮廓进行直线拟合,得到清洁路径,所述清洁路径包括所述墙角区域的墙角行走路径。
27、可选地,所述清洁区域包括多个栅格,所述确定内层轮廓包括:
28、确定目标栅格与目标障碍物的目标距离,所述目标栅格为多个所述栅格中的一个栅格,所述目标障碍物为所述清洁区域内与所述目标栅格最近的障碍物;
29、根据所述目标距离确定所述目标栅格的权值,其中,所述目标距离越大,所述权值越大,所述目标距离越小,所述权值越小;
30、提取权值等于指定权值的多个栅格依序组成内层轮廓,所述指定权值对应的宽度为所述目标宽度。
31、可选地,所述墙角行走路径包括至少一个拐角,所述对所述墙角区域执行清洁操作包括
32、确定所述拐角的目标墙角类型;
33、根据所述目标墙角类型生成墙角转向信息;
34、按照所述墙角转向信息对所述墙角区域进行清洁。
35、可选地,所述拐角由依序连接的第一线段与第二线段相交得到,所述墙角类型包括阳角类型和阴角类型,所述确定所述拐角的目标墙角类型包括:
36、按照预设清洁方向确定所述第一线段的第一向量及第二线段的第二向量;
37、根据所述第一向量与所述第二向量,确定所述第一线段与所述第二线段的连接方向是否为顺时针;
38、若所述第一线段与所述第二线段的连接顺序为顺时针,则确定所述阳角类型为所述拐角的目标墙角类型;
39、若所述第一线段与所述第二线段的连接顺序为逆时针,则确定所述阴角类型为所述拐角的目标墙角类型。
40、可选地,所述根据所述目标墙角类型生成墙角转向信息包括:
41、若所述拐角的目标墙角类型为阳角类型,则确定所述第一向量与所述第二向量的夹角,根据所述夹角生成墙角转向信息;
42、若所述拐角的目标墙角类型为阴角类型,则确定分别与所述第一向量与所述第二向量相交的第三向量,对所述第三向量的向量方向进行取反,得到取反方向,根据所述取反方向生成墙角转向信息。
43、在第二方面,本申请实施例提供一种机器人,包括存储器及处理器,所述存储器连接至所述处理器,所述处理器用于执行存储在所述存储器中的一个或多个计算机程序,所述处理器在执行所述一个或多个计算机程序时,使得所述机器人实现上述的墙角清洁方法。
44、在第三方面,本申请实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序包括程序指令,所述程序指令当被处理器执行时使所述处理器执行上述的墙角清洁方法。
45、本申请实施例可以实现如下技术效果:首先,本申请实施例能够聚类位于墙角区域内的至少一个点状障碍物,得到障碍群,如此可避免点状障碍物因为占地面积小而在规划路径时丢失点状障碍物的信息的问题出现,将多个点状障碍物聚类成障碍群,有利于提高规划路径的规划科学性。其次,本申请实施例避让障碍群前往墙角区域,如此可减少在墙角区域与点状障碍物发生碰撞的概率,有利于提高机器人的使用寿命和清洁效率。最后,本申请实施例对墙角区域执行清洁操作。总体而言,本申请实施例能够将至少一个点状障碍物聚类成障碍群,以方便机器人能够高效率地避让各个点状障碍物,进而能够减少机器人在清洁墙角区域时与障碍物发生碰撞的概率。
技术特征:1.一种墙角清洁方法,应用于机器人,其特征在于,包括:
2.根据权利要求1所述的墙角清洁方法,其特征在于,所述聚类位于墙角区域内的至少一个点状障碍物,得到障碍群包括:
3.根据权利要求2所述的墙角清洁方法,其特征在于,所述确定所述清洁区域的墙角包括:
4.根据权利要求2所述的墙角清洁方法,其特征在于,所述以所述墙角为基准点,创建指定尺寸的墙角区域包括:
5.根据权利要求2所述的墙角清洁方法,其特征在于,所述对位于所述墙角区域内的至少一个点状障碍物进行聚类,得到障碍群包括:
6.根据权利要求1至5任一项所述的墙角清洁方法,其特征在于,所述避让所述障碍群前往所述墙角区域包括:
7.根据权利要求6所述的墙角清洁方法,其特征在于,所述确定所述墙角区域的墙角行走路径包括:
8.根据权利要求7所述的墙角清洁方法,其特征在于,所述清洁区域包括多个栅格,所述确定内层轮廓包括:
9.根据权利要求6所述的墙角清洁方法,其特征在于,所述墙角行走路径包括至少一个拐角,所述对所述墙角区域执行清洁操作包括
10.根据权利要求9所述的墙角清洁方法,其特征在于,所述拐角由依序连接的第一线段与第二线段相交得到,所述墙角类型包括阳角类型和阴角类型,所述确定所述拐角的目标墙角类型包括:
11.根据权利要求9所述的墙角清洁方法,其特征在于,所述根据所述目标墙角类型生成墙角转向信息包括:
12.一种机器人,其特征在于,包括存储器及处理器,所述存储器连接至所述处理器,所述处理器用于执行存储在所述存储器中的一个或多个计算机程序,所述处理器在执行所述一个或多个计算机程序时,使得所述机器人实现如权利要求1-11任一项所述的墙角清洁方法。
13.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序包括程序指令,所述程序指令当被处理器执行时使所述处理器执行如权利要求1-11任一项所述的墙角清洁方法。
技术总结本申请实施例涉及机器人技术领域,尤其涉及一种墙角清洁方法、机器人及计算机可读存储介质。首先,本实施例聚类位于墙角区域内的至少一个点状障碍物,得到障碍群,如此可避免点状障碍物因为占地面积小而在规划路径时丢失点状障碍物的信息的问题出现,将多个点状障碍物聚类成障碍群,有利于提高规划路径的规划科学性。其次,本实施例避让障碍群前往墙角区域,如此可减少在墙角区域与点状障碍物发生碰撞的概率,有利于提高机器人的使用寿命和清洁效率。最后,本实施例对墙角区域执行清洁操作。总体而言,本实施例将至少一个点状障碍物聚类成障碍群,以便机器人高效率地避让点状障碍物,进而减少机器人在清洁墙角区域时与障碍物发生碰撞的概率。技术研发人员:吴兴伟,叶力荣受保护的技术使用者:佛山市银星智能制造有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289291.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表