一种火车摘钩机器人及摘钩方法与流程
- 国知局
- 2024-08-01 08:30:23
本发明涉及火车摘钩,尤其是涉及一种火车摘钩机器人及摘钩方法。
背景技术:
1、所谓摘钩是指将货车的车厢之间所连接的车钩进行摘解的工作,其中车钩与连接设备是列车的重要组成部分之一,其必需具有足够的强度承担整列车的牵引力;还需要具有足够的安全性,避免意外脱开;并且还要有足够的灵活性,提供旋转与缓冲,摘钩机器人则是在摘钩工作中,负责将车钩提杆进行提拉的设备。
2、专利网公开号cn220096369u公开了一种火车摘钩机器人,包括摘钩机器人,摘钩机器人包括安装板、固定块、电动推杆、滑槽、固定杆、固定板、安装箱、电机缸、支轴、摘钩头和滑套,安装板背面安装有固定块,电动推杆安装于安装板正面,电动推杆两侧开设有滑槽,固定杆安装于电动推杆两侧,固定板固定安装于电动推杆正面,固定板底部固定安装有安装箱,安装箱内腔安装有电机缸,支轴底部安装有摘钩头,滑套安装于安装板正面。通过电动推杆工作,能够带动固定板前后移动,当火车停止稳定后,启动电机缸将支轴缩短对摘钩头进行向上移动,对火车钩铁进行摘钩,达到自动摘钩的效果。
3、以上摘钩机器人实现了代替人工手动摘钩的效果,但在实际操作,往往需要对不同的车厢车钩执行摘钩操作,从而需要对摘钩机器人进行不断转移,并且在转移至指定位置后能够快速投入工作,以上装置缺乏对于装置具体如何快速安装的功能进行说明,故而无法保证其携带时的便捷性以及在使用时是否能够快速安装,从而存在局限性。
技术实现思路
1、为了解决上述提出的问题,本发明提供一种火车摘钩机器人。
2、本发明提供的一种火车摘钩机器人采用如下的技术方案:
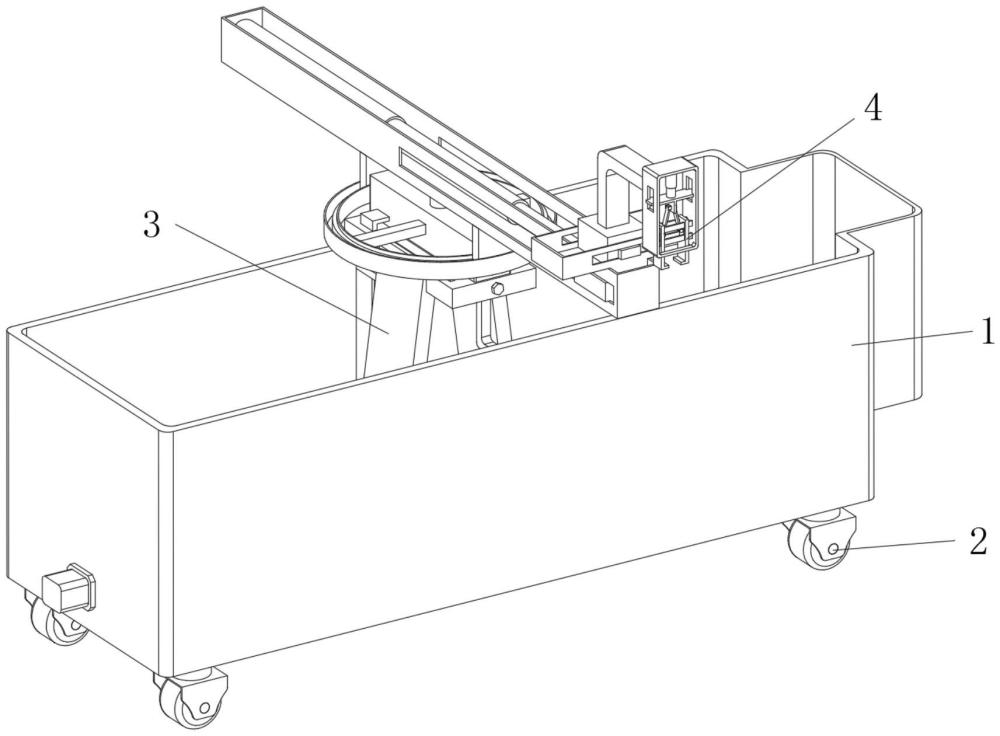
3、一种火车摘钩机器人,包括放置箱,所述放置箱底部固定连接有万向轮,所述放置箱内部设置有控制机构;
4、所述控制机构包括托板和两个底板,两个底板均设置于放置箱内部,所述放置箱内腔前后两侧壁上均开设有第一滑槽,所述底板延伸入第一滑槽内部并与第一滑槽相匹配,所述放置箱内部转动连接有第一双向螺纹杆,所述第一双向螺纹杆依次贯穿两个底板并与底板通过螺纹连接,所述放置箱一侧壁上固定连接有电机,所述电机通过输出轴与第一双向螺纹杆一端固定连接,所述托板两侧均设置有斜板,两个斜板顶端均与托板通过转轴连接,两个斜板底部分别延伸入两个底板内部并与底板通过转轴连接,所述托板顶部放置有矩形框,所述矩形框顶部设置有主体框,所述主体框上设置有摘钩组件,所述主体框底部固定连接有圆杆,所述圆杆延伸入矩形框内部并与矩形框转动连接。
5、通过采用上述技术方案,放置箱通过底部的万向轮可进行灵活移动,当需要执行摘钩任务时,可通过控制第一双向螺纹杆转动的方式来控制两个底板进行相向或者相背离移动,在底板移动期间带动斜板摆动,进一步促使托板进行升降,以此灵活实现需要执行摘钩任务时的升起以及任务结束后降至放置箱内部进行收纳的目的,更便于携带和快速执行工作,灵活性较高。
6、优选的,所述圆杆外部固定连接有齿轮,所述矩形框内部设置有移动板,所述移动板上趋向于齿轮的一侧固定连接有齿条,所述齿条与齿轮相啮合,所述移动板顶部一体化成型有矩形板,矩形板一侧固定连接有第一电动推杆,第一电动推杆固定连接于矩形框内部,所述矩形框内部固定连接有限位板,所述限位板贯穿移动板。
7、通过采用上述技术方案,齿条移动后带动齿轮转动,促使主体框进行以圆杆为轴心的摆动。
8、优选的,所述矩形框外部固定连接有环形板,环形板顶部开设有环形限位槽,所述主体框底部固定连接有稳定板,所述稳定板延伸入环形限位槽内部并与环形限位槽相匹配。
9、通过采用上述技术方案,稳定板插入环形板内部后,可进一步对主体框提供支撑,确保主体框的稳定性。
10、优选的,所述托板底部固定连接有两个导向杆,所述放置框前后两侧壁上均开设有竖槽,两个导向杆分别延伸入两个竖槽内部,且导向杆与竖槽相匹配。
11、通过采用上述技术方案,导向杆可在竖槽内部上下灵活移动。
12、优选的,所述控制机构包括安装组件,安装组件包括四个插板,四个插板均固定连接于矩形框外侧,所述托板上开设有四个插孔,四个插板分别贯穿四个插孔,且插板与插孔相匹配,所述托板内部转动连接有第二双向螺纹杆,所述第二双向螺纹杆外部设置有两个螺纹块,第二双向螺纹杆依次贯穿两个螺纹块并与螺纹块通过螺纹连接,两个螺纹块均滑动连接于托板内部,所述第二双向螺纹杆两侧均设置有两个定位块,四个定位块分别延伸入四个插孔内部,且定位块与插孔相匹配。
13、通过采用上述技术方案,第二双向螺纹杆两端螺纹方向相反,可带动两个螺纹块进行相向或者相背离移动。
14、优选的,四个所述定位块分别贯穿四个插板,两个所述螺纹块两侧均通过活动铰座活动连接有第一推拉杆,四个第一推拉杆分别与四个定位块一侧通过活动铰座活动连接。
15、通过采用上述技术方案,第一推拉杆摆动后可对定位块进行推动。
16、优选的,所述摘钩组件包括第一活动块,所述第一活动块滑动连接于主体框内部,所述第一活动块顶部固定连接有第一衔接框,所述第一衔接框内部滑动连接有第二活动块,所述第二活动块顶部固定连接有衔接杆,所述衔接杆一端固定连接有第二衔接框,所述第二衔接框内部设置有两个摘钩板,两个摘钩板均延伸出第二衔接框外部,所述第一活动块上固定连接有第二电动推杆,所述第二电动推杆固定连接于主体框内部,所述第二活动块上固定连接有第三电动推杆,所述第三电动推杆固定连接于第一衔接框内部。
17、通过采用上述技术方案,第二电动推杆可对第一活动块进行推拉,第三电动推杆可对第二活动块进行推拉。
18、优选的,所述第二衔接框内部固定连接有定位板,所述定位板分别贯穿两个摘钩板,所述第二衔接框内部滑动连接有t形板,所述t形板顶部固定连接有第四电动推杆,所述第四电动推杆顶部与第二衔接框内腔顶部固定连接,所述t形板内侧两边均通过活动铰座活动连接有第二推拉杆,两个推拉杆底部分别与两个摘钩板一侧通过活动铰座活动连接。
19、通过采用上述技术方案,第四电动推杆工作后可对t形板进行上下拉动。
20、本发明要解决的另一技术问题是提供一种火车摘钩机器人的摘钩方法,包括以下步骤:
21、s1、前端调节
22、首先将放置箱整体推至待摘钩的区域后,通过控制两个底板进行相向移动的方式来促使托板升起,从而促使摘钩组件提升至待摘钩的高度,随后控制主体框进行以圆杆为轴心的摆动,使摘钩组件停留在摘钩的方位;
23、s2、开始摘钩
24、步骤s1中的前端调节工作完成后,可分别控制第一活动块和第二活动块的移动来对摘钩的前后和左右方位的位置进行微调,以便于摘钩板勾住车钩的拉杆后,重复步骤s1中的升高调节,可将车钩拉杆拉出,达到摘钩目的;
25、s3、收纳放置
26、当摘钩工作完成后,首先控制主体框摆动至与放置箱相平行的角度后,此时主体框可收纳进入放置箱内部,随后控制两个底板进行相背离方向的移动,以此将所有的部件收纳进放置框中,以此进行便捷携带。
27、综上所述,本发明包括以下有益技术效果:
28、1、一种火车摘钩机器人及摘钩方法,通过控制机构的设计,放置箱通过底部的万向轮可进行灵活移动,当需要执行摘钩任务时,可通过控制第一双向螺纹杆转动的方式来控制两个底板进行相向或者相背离移动,在底板移动期间带动斜板摆动,进一步促使托板进行升降,以此灵活实现需要执行摘钩任务时的升起以及任务结束后降至放置箱内部进行收纳的目的,更便于携带和快速执行工作,灵活性较高。
29、2、一种火车摘钩机器人及摘钩方法,通过安装组件的设计,转动第二双向螺纹杆,此时螺纹块带动第一推拉杆翻转,第一推拉杆翻转后将定位块拉动至离开插板后,此时插板可从插孔中抽离出去,即可实现矩形框和托板之间的分离操作,以此进行灵活组装拆卸,更有利于使用者进行分开存储,以及某一单独零件存在异常需要维修等情况时,进行拆卸处理。
30、3、一种火车摘钩机器人及摘钩方法,通过摘钩组件的设计,可进行灵活调节摘钩位置,以便于快速对车钩上的拉杆勾住后执行摘钩操作,且在实现以上功能的同时,并未添加过多的零部件,有利于生产制造和控制使用成本。
本文地址:https://www.jishuxx.com/zhuanli/20240722/232016.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。