基于压电陶瓷内置的小型压电机器人及机器人可重构构型
- 国知局
- 2024-10-21 14:31:38
本发明涉及可重构机器人,具体为一种基于压电陶瓷内置的小型压电机器人及机器人可重构构型。
背景技术:
1、近年来,随着空间应用与未知环境探索需求的不断增长,对可重构机器人的环境适应性和模块尺寸提出了更为严苛的要求。传统的电磁电机驱动元件,因其易受磁场干扰和响应速度慢等缺陷,已难以满足复杂多变的任务需求。同时,现有可重构机器人模块体积庞大,严重制约了其运动灵活性和功能多样性。在这一背景下,压电机器人以其易小型化、快速响应、断电自锁及无电磁干扰等独特优势,逐渐成为实现机器人小型化和轻量化的关键技术。尽管已有研究利用压电陶瓷的共振特性开发出多自由度压电机器人,但由于缺乏有效的可重构策略,且驱动、控制、通讯和供电系统分离,导致其实用性和适应性受限。此外,现有压电机器人中,压电陶瓷通常外置于金属机体,使得驱动元件和连接线易受损老化。针对上述挑战,本发明提出一种采用压电驱动、内置压电陶瓷并配备多点位可重构策略的厘米级机器人,旨在通过集成化的系统设计和创新性的可重构方法,显著提升机器人的环境适应性、运动灵活性和多功能应用能力,为相关领域的技术进步和应用拓展提供强有力的支撑。
2、申请号为cn201710128346.3的中国专利公开了一种贴片式压电驱动四轮行星探测机器人及其工作方法,该系统采用压电驱动的方法,利用横梁的二阶纵向振动模态和一阶弯振模态,驱动螺栓质点做椭圆运动,经摩擦驱动车轮旋转,实现整个机器人系统向前或者向后运动以及转向。该技术解决了传统机器人移动系统需要复杂的传动和减速机构致使其难以实现小型化设计的问题。然而,该技术主要适用于小型压电机器人的平面多自由度移动需求,无法满足可重构应用、高环境适应以及保护压电陶瓷的需求。
技术实现思路
1、本发明为了解决上述提到的现有技术中贴片式压电驱动机器人在可重构性、环境适应性及压电陶瓷保护方面不足的问题,特此提出了一种基于压电陶瓷内置的小型压电机器人及机器人可重构构型。本发明继承了压电驱动的高效、简洁优势,实现了机器人的小型化设计,更通过引入多点位可重构策略,显著提升了机器人的构型多样性和环境适应性;并且保护了压电陶瓷免受外部环境的影响,从而确保了机器人的稳定、可靠运行。
2、本发明提出了一种基于压电陶瓷内置的小型压电机器人,其具体包括外壳模块、控制模块和驱动单元,外壳模块内设置有控制模块和驱动单元;驱动单元包括金属机体和四片压电陶瓷,金属机体上设置有正方形通孔,压电陶瓷设置于正方形通孔的内壁上并和控制模块连接,正面相对的两个压电陶瓷为一组,控制模块通过两组正弦激励信号分别激励两组压电陶瓷;金属机体上设置有若干一体化驱动足,一体化驱动足从外壳模块内部伸出。
3、更进一步地,所述控制模块发出的两组正弦激励信号之间无相位和频率耦合,两组正弦激励信号相互独立;同一组的两个压电陶瓷接收到的正弦激励信号相同。
4、更进一步地,所述压电陶瓷沿厚度方向极化。
5、更进一步地,所述金属机体两端为方形,且端部设置有若干一体化驱动足;金属机体中间为圆柱结构,圆柱结构内部设置有正方形通孔,正方形通孔的内壁和金属机体方形端部的边缘呈45度。
6、更进一步地,所述控制模块包括控制板和锂电池,控制板分别和锂电池以及压电陶瓷连接。
7、更进一步地,所述外壳模块包括控制模块外壳、上外壳和下外壳,控制模块外壳、上外壳和下外壳由上到下依次连接;控制模块外壳和上外壳扣合形成的腔体内部设置有驱动单元;上外壳和下外壳扣合形成的腔体内部设置有驱动单元。
8、更进一步地,所述上外壳和下外壳上均设置有若干夹持螺钉,驱动单元通过若干夹持螺钉设置于上外壳和下外壳扣合形成的腔体内部,驱动单元不直接和上外壳以及下外壳接触,一体化驱动足从下外壳上设置的通孔中伸出到外侧。
9、更进一步地,所述上外壳和下外壳外表面上设置有多点位磁性连接模组;所述若干基于压电陶瓷内置的小型压电机器人通过多点位磁性连接模组互相连接。
10、更进一步地,所述多点位磁性连接模组包括若干磁铁。
11、一种采用上述的基于压电陶瓷内置的小型压电机器人的机器人可重构构型,包括若干基于压电陶瓷内置的小型压电机器人和若干磁吸连接模块,若干基于压电陶瓷内置的小型压电机器人通过若干磁吸连接模块相互连接;磁吸连接模块包括三角块和四角块,三角块和四角块为棱柱结构,三角块和四角块表面设置有若干磁铁。
12、本发明所述的一种基于压电陶瓷内置的小型压电机器人及机器人可重构构型的有益效果为:
13、(1)本发明所述的一种基于压电陶瓷内置的小型压电机器人及机器人可重构构型,克服了现有技术中贴片式压电驱动机器人在可重构性、环境适应性及压电陶瓷保护方面不足的问题,采用了一种压电陶瓷内置的驱动单元,其工作频率超过20khz,具有毫秒级的响应速度;驱动单元通过摩擦效应巧妙地将驱动单元的一体化驱动足足端的微观振动(微米级)转化为机器人的宏观运动(厘米级),从而实现了机器人的快速平面运动;另外,本发明将压电陶瓷置于驱动单元内部,使得压电机器人能够进一步小型化,并对压电陶瓷进行保护,这一设计不仅解决了传统可重构机器人单元体积庞大、传动机构复杂的问题,而且避免了外置压电陶瓷的磨损,使系统具有更快的响应速度、更轻的重量和更好的拓展性;
14、(2)本发明所述的一种基于压电陶瓷内置的小型压电机器人及机器人可重构构型,通过多点位可重构策略,实现了丰富的可重构机器人构型(如链式构型群和环式构型群);这些构型各具运动特点,能够适应不同的运动地形,如:穿过宽阔的凹槽、跨越狭窄的狭缝、穿过狭窄的通道、穿过有高差的地形和通过狭窄的弯道;机器人还可以通过外接模组,实现无线图像捕获功能,这意味着机器人具备了多功能扩展应用的能力,大幅提升了机器人的适应能力和多场景应用能力;系统不仅易于小型化、响应迅速,而且具有丰富的可重构构型,为空间应用、灾害救援和地形探索等领域的应用提供了强大的技术支持。
技术特征:1.一种基于压电陶瓷内置的小型压电机器人,其特征在于:包括外壳模块(1)、控制模块(2)和驱动单元(4),外壳模块(1)内设置有控制模块(2)和驱动单元(4);驱动单元(4)包括金属机体(4-1)和四片压电陶瓷(4-2),金属机体(4-1)上设置有正方形通孔,压电陶瓷(4-2)设置于正方形通孔内壁上并和控制模块(2)连接,正面相对的两个压电陶瓷(4-2)为一组,控制模块(2)通过两组正弦激励信号分别激励两组压电陶瓷(4-2);金属机体(4-1)上设置有若干一体化驱动足,一体化驱动足从外壳模块(1)内部伸出。
2.根据权利要求1所述的基于压电陶瓷内置的小型压电机器人,其特征在于:所述控制模块(2)发出的两组正弦激励信号之间无相位和频率耦合,两组正弦激励信号相互独立;同一组的两个压电陶瓷(4-2)接收到的正弦激励信号相同。
3.根据权利要求1所述的基于压电陶瓷内置的小型压电机器人,其特征在于:所述压电陶瓷(4-2)沿厚度方向极化。
4.根据权利要求1所述的基于压电陶瓷内置的小型压电机器人,其特征在于:所述金属机体(4-1)两端为方形,且端部设置有若干一体化驱动足;金属机体(4-1)中间为圆柱结构,圆柱结构内部设置有正方形通孔,正方形通孔的内壁和金属机体(4-1)方形端部的边缘呈45度。
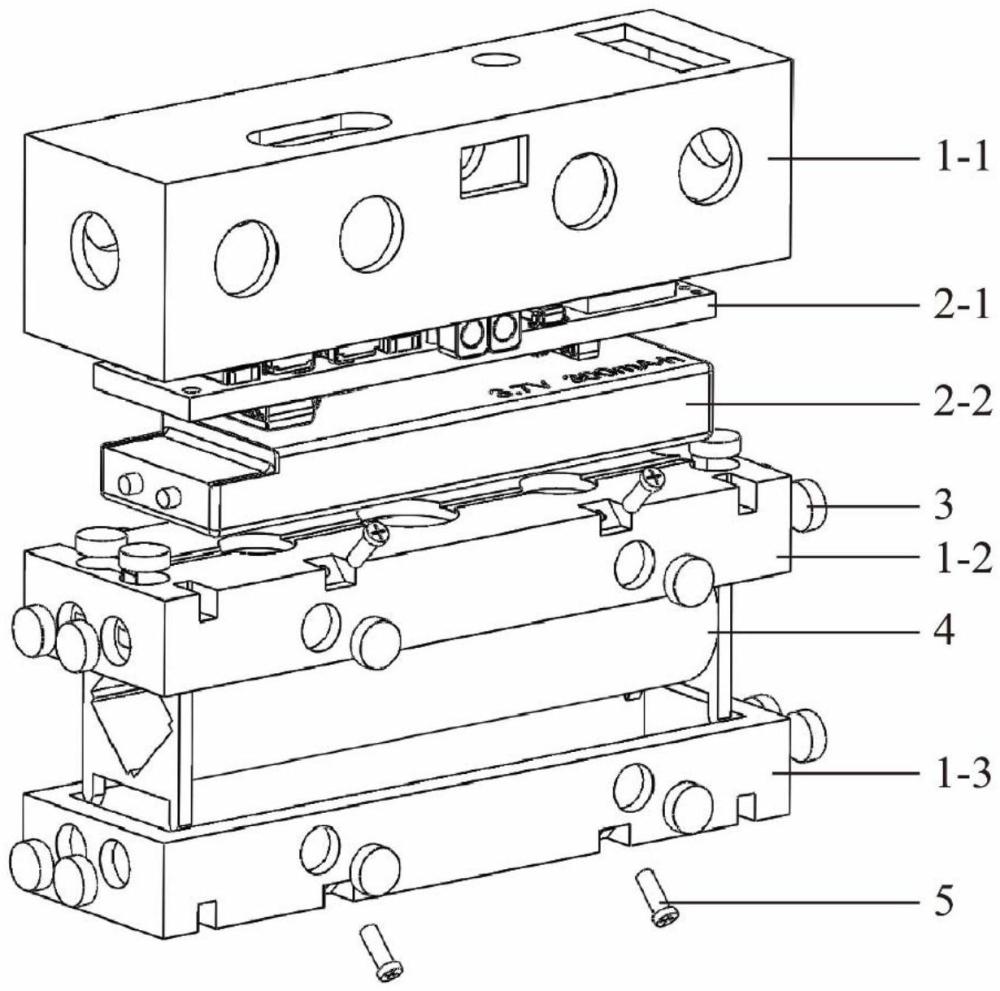
5.根据权利要求1所述的基于压电陶瓷内置的小型压电机器人,其特征在于:所述控制模块(2)包括控制板(2-1)和锂电池(2-2),控制板(2-1)分别和锂电池(2-2)以及压电陶瓷(4-2)连接。
6.根据权利要求1-5任一项所述的基于压电陶瓷内置的小型压电机器人,其特征在于:所述外壳模块(1)包括控制模块外壳(1-1)、上外壳(1-2)和下外壳(1-3),控制模块外壳(1-1)、上外壳(1-2)和下外壳(1-3)由上到下依次连接;控制模块外壳(1-1)和上外壳(1-2)扣合形成的腔体内部设置有驱动单元(4);上外壳(1-2)和下外壳(1-3)扣合形成的腔体内部设置有驱动单元(4)。
7.根据权利要求6所述的基于压电陶瓷内置的小型压电机器人,其特征在于:所述上外壳(1-2)和下外壳(1-3)上均设置有若干夹持螺钉(5),驱动单元(4)通过若干夹持螺钉(5)设置于上外壳(1-2)和下外壳(1-3)扣合形成的腔体内部,驱动单元(4)不直接和上外壳(1-2)以及下外壳(1-3)接触,一体化驱动足从下外壳(1-3)上设置的通孔中伸出到外侧。
8.根据权利要求6所述的基于压电陶瓷内置的小型压电机器人,其特征在于:所述上外壳(1-2)和下外壳(1-3)外表面上设置有多点位磁性连接模组;所述若干基于压电陶瓷内置的小型压电机器人通过多点位磁性连接模组互相连接。
9.根据权利要求8所述的基于压电陶瓷内置的小型压电机器人,其特征在于:所述多点位磁性连接模组包括若干磁铁(3)。
10.一种采用权利要求9所述的基于压电陶瓷内置的小型压电机器人的机器人可重构构型,其特征在于:包括若干基于压电陶瓷内置的小型压电机器人和若干磁吸连接模块,若干基于压电陶瓷内置的小型压电机器人通过若干磁吸连接模块相互连接;磁吸连接模块包括三角块(6)和四角块(7),三角块(6)和四角块(7)为棱柱结构,三角块(6)和四角块(7)表面设置有若干磁铁(3)。
技术总结本发明公开了一种基于压电陶瓷内置的小型压电机器人及机器人可重构构型,涉及可重构机器人技术领域,解决了贴片式压电机器人在可重构性、环境适应性及压电陶瓷保护方面不足的问题。本发明外壳模块内设置有控制模块和驱动单元;驱动单元包括金属机体和压电陶瓷,压电陶瓷设置于金属机体内的正方形通孔内壁上并和控制模块连接,正面相对的两个压电陶瓷为一组,控制模块通过两组正弦信号分别激励两组压电陶瓷;金属机体上设置有若干一体化驱动足,一体化驱动足从外壳模块内部伸出。本发明实现了机器人的小型化,引入多点位可重构策略,显著提升了机器人的构型多样性和环境适应性;保护压电陶瓷免受外部环境影响,确保机器人的稳定、可靠运行。技术研发人员:刘英想,高宇,张仕静,邓杰,李京受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/318459.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表