用于引导通过编程的机器人系统的制作方法
- 国知局
- 2024-10-15 10:24:54
本发明涉及一种机器人系统,适于通过由用户引导通过来学习移动。
背景技术:
1、引导通过是一种教导机器人它想要复制的移动的方便且高效的方式。在引导通过模式下,当用户抓住机器人机械手的可移动部分并且使它位移时,相关联的控制器将记录机械手经过的坐标或姿势,以便稍后在生产模式下复制移动时沿这些坐标或姿势移动它。
2、实施引导通过模式时要克服的困难是,机械手的关节一定不能变得无力,但是必须保持足够的“紧张”,以保持其姿势,同时不被用户操纵。另一方面,机械手应当容易屈服于用户所施加的力。控制器基于机械手的关节坐标计算作用于机械手的每个关节的重力引起的转矩,并且控制与每个关节相关联的马达以生成补偿重力引导的转矩所需的精确量的转矩,因此可以满足第一要求。为了使机械手位移,用户然后仍然必须克服机械手的内部摩擦,在大型工业机器人的情况下,这可能是身体上的挑战。因此,有必要实施某种伺服机构,该伺服机构将检测用户敦促机械手进入某个方向,并且将控制马达以使其向那个方向移动,从而克服内部摩擦。
3、这样做的一种方式在本领域中被称为基于导纳的控制。此处,控制器检测由用户施加到可移动部分的向量力,并且控制机械手,使得可移动部分在力的方向上并且以取决于力的大小的速度来移动。利用这种方法,用户必须一直施加非零力,直到可移动部分到达其目标位置,这样体力消耗最多只能减少,但不能避免。进一步地,事实上,类似于当移动勺子通过粘稠液体时,用户必须克服的力往往越强,可移动部分就移动得越快,使在引导通过中进行迅速的移动变得困难。
4、这就是为什么机器人系统通常对引导通过使用基于阻抗的控制。在基于阻抗的控制中,检测到的是移动部分的参考位置和实际位置之间的偏差。当参考位置落后于实际位置,并且用户使移动部分以恒定的速度移动时,这种滞后将倾向于调整,使得控制器最终以用户所期望的速度驱动移动部分。用户所感受到的阻力可以设置为接近于零,这样就可以毫不费力地教导快速且遥远的移动。
5、然而,当涉及到精确定位时,基于阻抗的控制具有其局限性。当用户试图使移动部分位移一小段距离时,参考位置与实际位置之间的偏差也很小,并且控制器为支持预期位移而施加的马达转矩最初可能太小而无法克服机械手的静摩擦。一旦该马达转矩变得足够大以克服静摩擦,机械手很可能会抽搐,最终停在超出用户所预期的位置。
6、传统上,通过仅对其中精度并不重要的移动或移动的部分使用引导通过,并且通过机械手外部的某些输入装置使用微动控制进行精细定位,已经解决了这个问题。微动控制往往是耗时的,因为用户不能先验地告知输入到外部输入装置的微动步长将如何转化为机械手的移动。试图通过例如在应用坐标中限定微动动作来克服这个问题的方法仍然受到这一限制,即这些坐标必须首先与现实世界精确地匹配。用户还必须将注意力分散在机械手和输入设备之间,这使得过程不太直观。
7、因此,本发明的目的是提供一种不仅快速地、毫不费力地,而且以高精度在引导通过模式下进行教导的机器人系统,以及用于这种机器人系统的控制方法。
技术实现思路
1、因此,这个目的是在包括机械手和控制器的机器人系统中实现的,其中控制器支持引导通过操作模式的基于阻抗的控制,控制器可在引导通过模式的基于阻抗的控制和基于导纳的控制之间切换。因此,基于阻抗的控制可以用于向系统教导移动的长途部分,不是精确地达到目标位置,而是接近某个位置,并且必须精确到达目标位置的最终短途部分可以在导纳控制下完成。对于最终部分,在导纳控制下,机械手总是表现出一定的阻力来位移,这一点并不重要,一方面是因为位移的距离很短,另一方面是因为在需要精确定位的地方,用户将使机械手缓慢地位移,而且位移越慢,阻力往往就越小。
2、系统可以包括手动操作的开关,该手动操作的开关用于在引导通过模式的基于阻抗的控制和基于导纳的控制之间进行切换。
3、在大多数实际实施例中,开关将是手动操作的,但是语音或手势控制也是可想象的。
4、为了方便处理,手动操作的开关可以设置在机械手的可移动部分中,理论上靠近末端执行器,即它与末端执行器之间不应有多于一个关节。
5、在机械手具有手柄部分以被握在引导通过模式下引导机械手的用户的手中的情况下,开关可以位于或靠近手柄部分,以便可由握着手柄部分的手操作。
6、相同的开关也可以用于在机器人系统的引导通过模式和生产模式之间进行切换,例如给定时间间隔内开关的单次操作可能会导致引导通过模式和生产模式之间的切换,而在引导通过模式下,开关的双次操作会导致基于阻抗的控制和基于导纳的控制之间的切换。
7、当机械手具有上述手柄部分时,开关还可以是传感器,该传感器对手柄部分被触摸的方式敏感。例如,压力传感器可以对手柄部分被握住的牢固性敏感,例如通过检测施加到手柄部分的相对侧的压力。当用户的手从相对侧按压或压力超过给定阈值时,用户很可能希望在移动手柄部分后使其减速,这表明他打算进行最好应在基于阻抗的控制下执行的长距离移动,而轻微的压力或从一侧轻推手柄部分仅表明用户旨在进行精细定位,这应在基于导纳的控制下执行。
8、如果控制器适于扫描用户针对预定形式到手柄部分中的输入并且当在输入中检测到形式时,从基于阻抗的控制和基于导纳的控制之间的一种切换到另一种,则可以省去开关。
9、这种形式可以是输入的方向的突然变化。因此,在移动开始时,用户可能会“抖松”机械手,以便使其在基于阻抗的控制下易于位移。
10、另一方面,当用户正试图在长移动结束时到达预定目标位置时,在速度持续下降之前很可能发生方向变化。在这种情况下,通过自动切换到基于导纳的控制,可以促进精细定位。
11、应当提供指示器,通过指示器,用户可以在任何时间告知机械手在哪种类型的控制下。
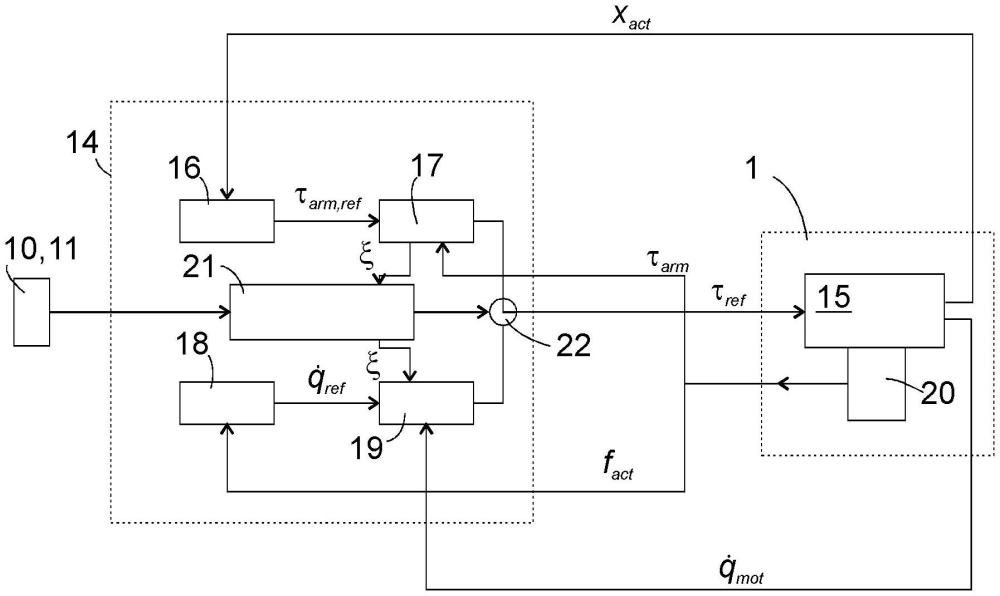
12、控制器通过将参考参数的连续值传输给机械手的马达来控制机械手的移动。通常,参考参数指定马达要输出的转矩。通常,这些值将根据机械手是在阻抗控制下还是在导纳控制下而有所不同。因此,应当注意避免发送给马达的参考参数值的突然变化,其可能导致机械手在切换的事件中抽搐。因此,在控制器包括用于在阻抗控制和导纳控制中的第一控制下依次输出参考参数值的第一控制回路以及用于在阻抗控制和导纳控制中的另一个控制下依次输出参考参数值的第二控制回路的情况下,在从基于阻抗的控制和基于导纳的控制中的第一控制切换到另一个控制的事件中,第二控制回路应进行初始化,以输出与在切换前的最后一次迭代中由第一控制回路输出的值相差不超过预定量的值,作为切换后的第一次迭代的参考参数值。在最简单的情况下,初始化可以导致切换后的第一次迭代的参考参数值与切换前的最后一次迭代的参考参数值相同。
13、目的还通过用于在引导通过模式下控制机器人系统的方法来实现,机器人系统具有机械手和控制器,其中用户引导机械手的移动部分移动到目标位置,方法包括以下步骤:
14、a)控制器在阻抗控制下支持移动的初始阶段,以及
15、b)控制器在导纳控制下支持移动的最终阶段。
本文地址:https://www.jishuxx.com/zhuanli/20241014/317609.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表