一种具有镜头自清理功能的煤矿巡检机器人的制作方法
- 国知局
- 2024-10-15 10:17:24
本发明涉及巡检机器人,具体涉及一种具有镜头自清理功能的煤矿巡检机器人。
背景技术:
1、机器人作为二十一世纪的战略性技术领域,已广泛应用各个行业,在煤矿行业中,机械化换人是一种趋势。巡检机器人的应用符合智慧矿山建设要求,能够降低工人劳动强度,减小巡检误差,提高工作效率。
2、随着煤炭开采的深入,煤矿安全监测变得尤为重要。传统的人工巡检方式存在安全风险高、效率低等问题。因此,采用机器人进行煤矿巡检已成为发展趋势。然而,在煤矿这种恶劣环境下,巡检机器人的摄像头镜头很容易受到煤尘的污染,影响巡检效果和图像清晰度。
3、现有的巡检机器人大多缺乏有效的镜头自清理功能,导致需要频繁的人工维护,增加了作业难度和维护成本。
技术实现思路
1、为此,本发明提供一种具有镜头自清理功能的煤矿巡检机器人,以解决现有技术中的上述问题。
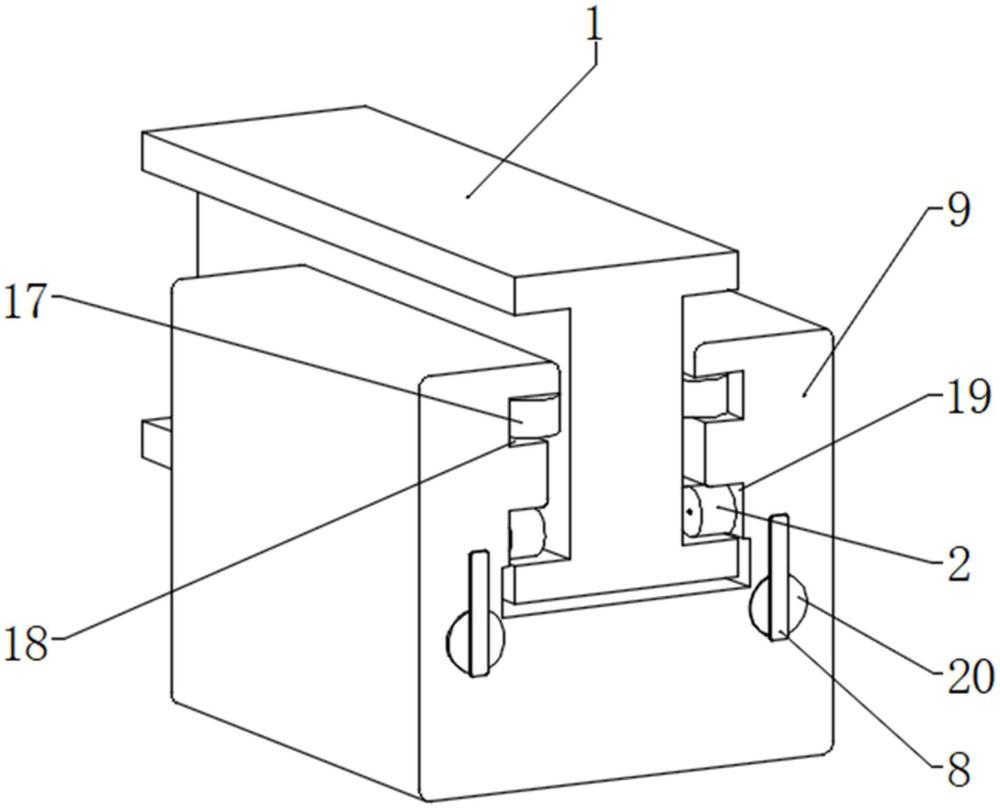
2、为了实现上述目的,本发明提供如下技术方案:根据本发明的第一方面,一种具有镜头自清理功能的煤矿巡检机器人,包括:轨道和滚动轮,所述轨道外壁设有滚动轮,所述滚动轮中部设有传动轴,所述传动轴外壁套设有蜗杆,所述传动轴远离滚动轮一端设有电机,所述蜗杆底部设有直齿轮,所述直齿轮中部设有转动轴,所述转动轴远离直齿轮一端设有清洁杆,所述电机远离传动轴一侧设有外壳,所述电机与外壳固定连接,所述转动轴与外壳转动连接,所述转动轴与清洁杆固定连接。
3、进一步,所述蜗杆远离电机一侧设有第一锥齿轮,所述第一锥齿轮外壁设有第二锥齿轮。
4、进一步,所述第二锥齿轮顶部设有连接杆,所述连接杆外壁套设有传动盘。
5、进一步,所述传动盘外壁设有传动带,所述传动带远离传动盘一侧设有转动盘。
6、进一步,所述转动盘中部设有旋转轴,所述旋转轴底部设有转动轮。
7、进一步,所述外壳外壁与转动轮对应处开设有第一安装槽,所述外壳外壁与滚动轮对应处开设有第二安装槽。
8、进一步,所述旋转轴与外壳转动连接,所述连接杆与外壳转动连接。
9、进一步,所述外壳外壁前后两侧设有摄像头。
10、本发明具有如下优点:
11、1、通过设置蜗杆、电机、直齿轮、转动轴和清洁杆,使得巡检机器人按照轨道的运行移动的过程中,其中电机在驱动滚动轮转动的过程中,带动蜗杆和直齿轮运转,从而使得清洁杆同步转动,使得巡检机器人在移动的过程中,清洁杆可以持续转动,对摄像头进行清洁;
12、2、通过设置第一锥齿轮、第二锥齿轮、旋转轴和转动轮,使得当电机驱动滚动轮运转的同时,第一锥齿轮带动第二锥齿轮运转,同时旋转轴带动转动轮转动,使得巡检机器人在移动的过程中,始终保持自身稳定。
技术特征:1.一种具有镜头自清理功能的煤矿巡检机器人,包括:轨道(1)和滚动轮(2),其特征在于,所述轨道(1)外壁设有滚动轮(2),所述滚动轮(2)中部设有传动轴(3),所述传动轴(3)外壁套设有蜗杆(4),所述传动轴(3)远离滚动轮(2)一端设有电机(5),所述蜗杆(4)底部设有直齿轮(6),所述直齿轮(6)中部设有转动轴(7),所述转动轴(7)远离直齿轮(6)一端设有清洁杆(8),所述电机(5)远离传动轴(3)一侧设有外壳(9),所述电机(5)与外壳(9)固定连接,所述转动轴(7)与外壳(9)转动连接,所述转动轴(7)与清洁杆(8)固定连接。
2.根据权利要求1所述的一种具有镜头自清理功能的煤矿巡检机器人,其特征在于,所述蜗杆(4)远离电机(5)一侧设有第一锥齿轮(10),所述第一锥齿轮(10)外壁设有第二锥齿轮(11)。
3.根据权利要求2所述的一种具有镜头自清理功能的煤矿巡检机器人,其特征在于,所述第二锥齿轮(11)顶部设有连接杆(12),所述连接杆(12)外壁套设有传动盘(13)。
4.根据权利要求3所述的一种具有镜头自清理功能的煤矿巡检机器人,其特征在于,所述传动盘(13)外壁设有传动带(14),所述传动带(14)远离传动盘(13)一侧设有转动盘(15)。
5.根据权利要求4所述的一种具有镜头自清理功能的煤矿巡检机器人,其特征在于,所述转动盘(15)中部设有旋转轴(16),所述旋转轴(16)底部设有转动轮(17)。
6.根据权利要求5所述的一种具有镜头自清理功能的煤矿巡检机器人,其特征在于,所述外壳(9)外壁与转动轮(17)对应处开设有第一安装槽(18),所述外壳(9)外壁与滚动轮(2)对应处开设有第二安装槽(19)。
7.根据权利要求5所述的一种具有镜头自清理功能的煤矿巡检机器人,其特征在于,所述旋转轴(16)与外壳(9)转动连接,所述连接杆(12)与外壳(9)转动连接。
8.根据权利要求1所述的一种具有镜头自清理功能的煤矿巡检机器人,其特征在于,所述外壳(9)外壁前后两侧设有摄像头(20)。
技术总结本发明公开了一种具有镜头自清理功能的煤矿巡检机器人,包括:轨道和滚动轮,所述轨道外壁设有滚动轮,所述滚动轮中部设有传动轴,所述传动轴外壁套设有蜗杆,所述传动轴远离滚动轮一端设有电机,所述蜗杆底部设有直齿轮,所述直齿轮中部设有转动轴,所述转动轴远离直齿轮一端设有清洁杆,所述电机远离传动轴一侧设有外壳,所述电机与外壳固定连接,所述转动轴与外壳转动连接。通过设置蜗杆、电机、直齿轮、转动轴和清洁杆,使得巡检机器人按照轨道的运行移动的过程中,其中电机在驱动滚动轮转动的过程中,带动蜗杆和直齿轮运转,从而使得清洁杆同步转动,使得巡检机器人在移动的过程中,清洁杆可以持续转动,对摄像头进行清洁。技术研发人员:郭天馨,林雨垚受保护的技术使用者:华夏天信(北京)机器人有限公司技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241014/317130.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表