一种带电作业机器人作业监控装置的制作方法
- 国知局
- 2024-10-15 10:21:46
本发明涉及带电作业机器人,更具体地说,涉及一种带电作业机器人作业监控装置。
背景技术:
1、带电作业机器人是一种专门用于在电力系统中进行带电作业的机器人。它们的主要目的是在不切断电源的情况下进行各种电力维护和操作,从而提高电力系统的运行效率和可靠性。带电作业机器人通常用于特高压输电线路、变电站等场所,能够替代人类在高风险环境中的操作,减少人员伤亡风险。
2、带电作业机器人上通常安装多个监控设备,这些设备能够实时传输现场画面,使操作人员能够清晰地观察到机器人的工作状态和周围环境;还能够利用图像处理技术,监控设备可以自动识别并检测输电线路上的各种故障或异常情况,如绝缘子破损、线路松动等。
3、现有带电作业机器人身上的监控设备大多位置固定,只能通过旋转或调节仰角来改变监控视角,对于通过机械臂完成电力维修作业的机器人来说,机械臂存在多维坐标上的变化,单一位置上的监控设备很难完全看清维修现场,给操作人员和图像处理都带来许多麻烦和限制;而且带电作业机器人在高污染的环境中作业时,空气中的灰尘、颗粒物等杂质容易污染监控设备,导致监控设备摄影清晰度降低,不利于带电作业机器人高效维修电力系统。
4、有鉴于现有技术中存在的技术问题,本发明提出一种带电作业机器人作业监控装置。
技术实现思路
1、针对现有技术中存在的问题,本发明的目的在于提供一种带电作业机器人作业监控装置,它可以解决现有带电作业机器人上的监控设备位置固定,监控范围有限和设备表面附着污垢后难以及时清洁的问题。具有调节灵活,监控设备可调可控、监控范围广、能够适应不同作业环境,且能够自动清洁监控设备的优点。
2、为解决上述问题,本发明采用如下的技术方案:
3、一种带电作业机器人作业监控装置,包括:
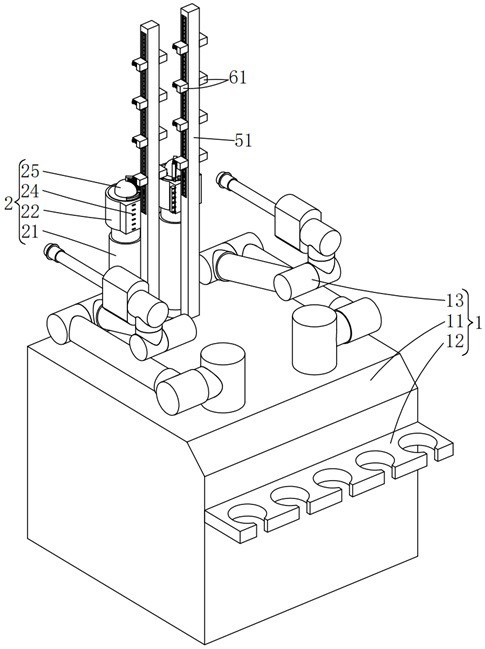
4、维修机构,所述维修机构包括本体;
5、所述本体的顶面设置有监控机构,所述监控机构包括对称安装在所述本体顶面的两个电动推杆,每个所述电动推杆的顶面均安装有一个支撑柱,每个所述支撑柱的顶面均安装有摄像头;
6、所述支撑柱的顶面设置有清洁机构,所述清洁机构包括安装在所述支撑柱顶面的壳体,所述壳体的一侧呈适配于所述摄像头表面的弧形面,所述壳体的一侧设置有清洁条,所述清洁条为适配于所述摄像头表面的弧形条状结构,且所述壳体抵触所述摄像头的表面。
7、作为本发明的一种优选方案,所述维修机构还包括安装于所述本体侧面的工具架,所述本体的顶面对称设置有两个机械臂。
8、作为本发明的一种优选方案,所述监控机构还包括固定于每个所述支撑柱一侧的侧板,每个所述支撑柱的侧面和每个所述侧板的表面均等距固定有若干拖拽扣,所述支撑柱的内部安装有第一弹簧,所述支撑柱的内部滑动连接有齿条,所述第一弹簧的一端安装于所述齿条的内端,所述齿条通过第一弹簧与所述支撑柱的内部弹性连接,且所述齿条的外端突出于所述支撑柱的外部。
9、作为本发明的一种优选方案,所述支撑柱的顶面安装有转动机构,所述转动机构包括转动连接于所述支撑柱顶部的转动环,且所述摄像头处于所述转动环的中间,所述转动环的底面安装有齿轮,所述齿轮与所述齿条啮合连接,所述支撑柱的顶面固定有压倒块,所述转动环的顶面设置有抵触板和排水弧块,所述排水弧块上均匀设有若干排水孔,所述排水孔的两端分别贯穿所述排水弧块的顶面和两侧。
10、作为本发明的一种优选方案,所述清洁机构还包括安装在所述转动环顶面的底座,所述底座的顶面一侧转动连接有转轴,所述转轴上安装有第一扭簧,且所述底座通过所述第一扭簧与所述转轴之间转动连接,所述转轴安装于所述壳体的底端一侧,所述壳体的一侧贯穿设置有插入弧槽,所述壳体的内部安装有若干第二弹簧,所述壳体的内部还滑动连接有支撑板,所述支撑板为适配于所述清洁条的弧形板状结构,且所述清洁条安装于所述支撑板的一侧,若干所述第二弹簧的一端均安装在所述支撑板的另一侧,所述支撑板的另一侧中部还固定有回收楔块。
11、作为本发明的一种优选方案,所述本体的顶面设置有带动机构,所述带动机构包括固定于所述本体顶面的两个立架,每个所述立架在位置上与一个所述电动推杆一一对应,所述立架的上段内部滑动连接有一个内推板,所述内推板的两侧为斜面,所述内推板的一侧设有凹槽,所述凹槽的内部等距安装有若干第三弹簧,且所述内推板通过若干所述第三弹簧弹性连接于所述立架的内部,所述内推板的另一侧等距固定有若干凸块,所述立架的上段两侧均贯穿设有侧通槽。
12、作为本发明的一种优选方案,所述立架的两侧设置有多个推出机构,所述推出机构包括等距固定于所述立架两侧的若干耳块,每个所述耳块的一侧均与所述侧通槽连通,每个所述耳块的另一侧设有缺口,每个所述耳块的内部均安装有第四弹簧,每个所述耳块的内部均滑动连接有推动块,所述推动块通过第四弹簧弹性连接于所述耳块的内部,且所述推动块的一端滑动连接于对应的所述侧通槽内。
13、作为本发明的一种优选方案,所述缺口的内部安装有传动机构,所述传动机构包括固定于每个所述耳块顶端的支撑臂,每个所述支撑臂的底端均转动连接于杠杆,所述杠杆的中部安装有第二扭簧,所述支撑臂的底端通过第二扭簧与所述杠杆的中部弹性连接,所述杠杆的一端抵触所述推动块的另一端,所述杠杆的另一端滑动连接有套块,所述套块的内部安装有第五弹簧,所述套块通过第五弹簧与所述杠杆的另一端弹性连接,所述套块的顶面边缘固定有拨动齿牙。
14、相比于现有技术,本发明的优点在于:
15、利用电动推杆带动摄像头上下升降,从而改变监控设备的拍摄范围,能够实时跟随机械臂的动作来清晰的拍摄实时画面,不仅更加方便操作人员操控和及时调整带电作业机器人,而且能够增大监控设备拍摄范围和距离,适应不同作业环境,减少拍摄死角,提升成像清晰度。利用电动推杆带动摄像头返回过程中,凸块抵触齿条,从而通过转动环带动清洁机构转动,进而完成清洁条对摄像头表面的清洁,取出摄像头表面污垢,提升拍摄清晰度。
16、凸块间隔设置于内推板的表面,凸块抵触齿条时,清洁机构能够围绕摄像头转动一周,进行清洁作业;凸块不抵触齿条时,齿条自动复位,利用齿条复位还能带动清洁机构返回,清洁机构返回后,壳体在压倒块的抵触下能够弯折九十度,从而降低壳体对摄像头监控的遮挡,减少死角,提高监控率和效果;而且利用支撑柱下滑过程中带动杠杆摆动,才能将凸块从立架中推出,从而利用凸块抵触齿条,电动推杆带动支撑柱停止下降后,第二扭簧能够带动杠杆立马复位,使凸块快速收回到立架中,让齿条立马带动清洁机构复位,这样不管监控机构处于什么高度,只要电动推杆停止升降,清洁机构能够立马复位(倾倒),从而避免清洁机构在摄像头工作中出现误启动的情况。
17、壳体倾倒过程中,首先通过抵触板抵触回收楔块使清洁条收回到壳体内,既减少清洁条持续暴露,降低损耗,增加使用寿命,又能够避免作业环境中的杂质污染清洁条,从而保持清洁条的清洁效果,同时方便后续排水弧块挤压清洁条,在清洁条吸水的情况下快速排出清洁条吸收的水分。
本文地址:https://www.jishuxx.com/zhuanli/20241014/317400.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表