一种多角度柔性仿生机械手的制作方法
- 国知局
- 2024-10-15 10:23:27
本发明涉及仿生机械手,特别涉及一种多角度柔性仿生机械手。
背景技术:
1、仿生机械手的设计与开发,是近年来机器人技术领域的一个重要研究方向,它结合了仿生学、材料科学、传感器技术、控制理论和机械工程等多个学科的最新成果,旨在创造出能够执行复杂操作、适应多变环境、并具有高度灵活性与智能性的机械装置,在工业自动化、医疗手术、空间探索、救援任务和日常生活辅助等领域,这种机械手的设计灵感来源于自然界中生物的灵活肢体,如人类的手、章鱼的触手或蛇的躯体,它们通常采用柔性的材料和结构,能够实现多自由度的运动,模仿生物肢体的灵活性和适应性。例如,通过使用形状记忆合金、软体机器人技术或气动网络,机械手能够实现类似生物肌肉的伸缩和弯曲,以适应不同形状和大小的物体,多角度柔性仿生机械手通常配备有丰富的传感器,如力觉传感器、触觉传感器、视觉传感器等,这些传感器能够提供关于环境和物体的实时反馈,使机械手能够感知物体的质地、形状和位置,从而进行精确的抓握和操作,并结合先进的控制算法,机械手能够根据任务需求和环境变化自动调整抓握力度、角度和方向,实现智能化的交互。
2、现有的仿生机械手大多采用五指或四指设计,虽较为灵活,但是物体进行抓握时,与物体的接触面积较小,从而导致装置的抓握稳定性较差,使物体容易在移动的过程中出现倾倒或滑落的情况,特别是在对多边形物体进行抓握时,多边形物体的多个面受力不均,更容易出现这种情况,因此现提出一种多角度柔性仿生机械手具有增加接触面积和摩擦力和提高装置抓握时稳定性的效果。
技术实现思路
1、为解决上述背景技术中提出采用五指或四指设计,虽较为灵活,但是物体进行抓握时,与物体的接触面积较小,从而导致装置的抓握稳定性较差,使物体容易在移动的过程中出现倾倒或滑落的情况,特别是在对多边形物体进行抓握时,多边形物体的多个面受力不均,更容易出现这种情况问题,本发明提供了一种多角度柔性仿生机械手。
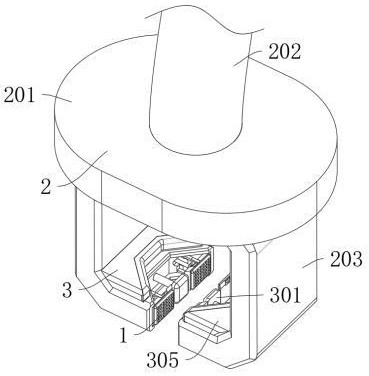
2、一种多角度柔性仿生机械手,包括转动机构,所述的转动机构的表面设置有主体机构,主体机构的内部设置有固定机构;
3、所述的转动机构包括转动板,转动板上固定连接有第一气囊,第一气囊远离转动板的一侧固定连接有若干个凸块,转动板的上下两端分别开设有限位槽,两个限位槽的内部均滑动连接有限位杆,限位杆远离转动板的一端与滑动架之间固定连接,滑动架上固定连接有两个滑板,滑动架远离转动板的一侧固定连接有第一活塞杆,第一活塞杆远离滑动架的一端固定连接有第一弹簧,第一弹簧远离滑动架的一端与密封舱之间滑动连接。
4、优选地,所述的两个滑板均位于滑动架远离转动板的一侧,第一活塞杆位于两个滑板之间,第一活塞杆远离滑动架的一端通过第一弹簧与密封舱之间弹性连接,滑动架的外形呈现为“u”字型,滑动架的两端与转动板之间滑动连接。
5、优选地,所述的主体机构包括机械手主体,机械手主体的顶部设置有柔性机械臂,机械手主体的底部转动连接有两个夹爪。
6、优选地,所述的夹爪的内部开设有四个第一滑槽,四个第一滑槽均贯穿夹爪的内壁延伸至两个夹爪之间,第一滑槽的尺寸与滑板的尺寸相适配,滑板与第一滑槽之间滑动连接。
7、优选地,所述的机械手主体的内部开设有密封槽,夹爪的内部开设有通气槽,夹爪的内部开设有两个第二滑槽。
8、优选地,所述的两个第二滑槽均贯穿夹爪的内壁延伸至两个夹爪之间,两个第二滑槽位于四个第一滑槽的上方,密封槽位于四个第一滑槽之间,通气槽与密封槽之间相通。
9、优选地,所述的夹爪远离柔性机械臂的一端转动连接有两个转动板,第一气囊位于转动板远离夹爪的一侧,密封舱与夹爪的内壁之间固定连接。
10、优选地,所述的固定机构包括触发板,触发板上固定连接有第二活塞杆,第二活塞杆远离触发板的一端固定连接有第二弹簧,通气槽的内部滑动连接有第三活塞杆,第三活塞杆远离通气槽的一端固定连接有移动板,移动板远离第三活塞杆的一端固定连接有第二气囊,移动板远离第二气囊的一侧固定连接有两个滑杆。
11、优选地,所述的第三活塞杆位于两个滑杆之间,移动板位于触发板的上方。
12、优选地,所述的触发板位于两个转动板之间,第二活塞杆与密封槽之间滑动连接,第二活塞杆远离触发板的一端通过第二弹簧与密封槽的内壁之间弹性连接,两个转动板以触发板为中心对称分布,滑杆与第二滑槽之间滑动连接。
13、本发明的工作原理及工作过程:
14、在需要对多边形物体进行抓握时,先通过传感器感知物体的质地、形状和位置,并通过控制系统和驱动系统,使柔性机械臂带动夹爪移动到物体的上方,使机械手主体底部的两个夹爪分别位于物体的两侧,然后通过控制系统控制两个夹爪向相互靠近的方向转动;
15、在此过程中,两个夹爪上的触发板会先与物体的表面相抵,然而夹爪会继续向靠近物体的方向移动,从而使第二活塞杆在密封槽的内部向靠近通气槽的方向滑动,并挤压第二弹簧,同时会挤压密封槽内部的空气并将其挤压至通气槽的内部,通过气压使第三活塞杆带动移动板向远离通气槽的方向滑动,最终通过移动板带动两个夹爪上的两个第二气囊与物体的表面相抵,并挤压通气槽使第二气囊与物体的表面在最大程度上相贴合;
16、同时夹爪在向靠近物体移动的过程中,物体上的斜面会与转动板上的第一气囊相抵,并随着夹爪的移动挤压第一气囊,使转动板在夹爪的内部转动,同时转动板转动会使限位杆在限位槽的内部滑动,又因为滑动架通过滑板与第一滑槽之间滑动,所以转动板转动会对滑动架施加靠近夹爪方向的压力,从而带动第一活塞杆在密封舱的内部滑动,并挤压密封舱内部空气和第一弹簧,直至转动板的角度与物体斜面的角度一致时,第一气囊上的凸块与物体的斜面相贴合,且通过密封舱内部气压和第一弹簧的弹力,将物体固定在四个第一气囊之间,完成对物体的抓握。
17、本发明的有益效果:
18、本发明通过设置转动板和凸块等结构的配合,提升了装置在对物体抓握时的稳定性,夹爪在向靠近物体移动的过程中,物体上的斜面会与转动板上的第一气囊相抵,并随着夹爪的移动挤压第一气囊,使转动板在夹爪的内部转动,同时转动板转动会使限位杆在限位槽的内部滑动,又因为滑动架通过滑板与第一滑槽之间滑动,所以转动板转动会对滑动架施加靠近夹爪方向的压力,从而带动第一活塞杆在密封舱的内部滑动,并挤压密封舱内部空气和第一弹簧,直至转动板的角度与物体斜面的角度一致时,第一气囊上的凸块与物体的斜面相贴合,且通过密封舱内部气压和第一弹簧的弹力,将物体固定在四个第一气囊之间,增加装置对物体抓握时的接触面积,而在第一气囊上设置若干个凸块,可以提高装置抓握时的摩擦力,从而提高装置的抓握的稳定性,同时设置转动板可以适应多种不同的多边形物体的斜面角度,便于对其进行抓握,从而可以提高装置的适用范围;
19、本发明通过设置触发板和第二气囊等结构的配合,便利了与转动板之间配合,对物体进行双层固定,夹爪在向靠近物体移动的过程中,两个夹爪上的触发板会先与物体的表面相抵,然而夹爪会继续向靠近物体的方向移动,从而使第二活塞杆在密封槽的内部向靠近通气槽的方向滑动,并挤压第二弹簧,同时会挤压密封槽内部的空气并将其挤压至通气槽的内部,通过气压使第三活塞杆带动移动板向远离通气槽的方向滑动,最终通过移动板带动两个夹爪上的两个第二气囊与物体的表面相抵,并挤压通气槽使第二气囊与物体的表面在最大程度上相贴合,可以进一步提高装置在对物体进行抓握时的稳定性,同时通过双层固定,可以避免装置对物体进行移动时物体倾倒或滑落的情况发生。
本文地址:https://www.jishuxx.com/zhuanli/20241014/317508.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表