-
一种多主轴加工中心配套机械手的制作方法
本发明涉及机械手,尤其涉及一种多主轴加工中心配套机械手。背景技术:1、在现代制造业中,多主轴加工中心的应用越来越广泛,尤其是在对圆柱形铁制零件的多轴加工中,这类设备因其高效和精密的加工能力而受到青睐,......
-
一种铜母线码排机用机械手装置的制作方法
本发明涉及铜排生产,具体涉及一种铜母线码排机用机械手装置。背景技术:1、铜母线(或铜排)是铜加工材中的一种主要产品,具有较高的机械性能,良好的导电性、导热性,优良的抗腐蚀性、电镀性、钎焊性,美观的金属......
-
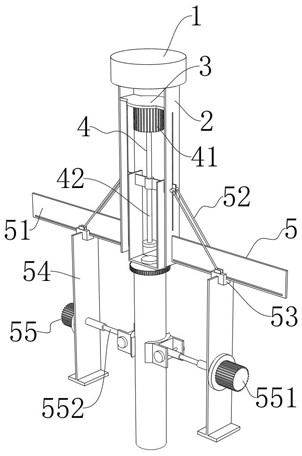
一种基于自动下料的电机转轴滚花机用机械手的制作方法
本发明属于机械手,具体涉及一种基于自动下料的电机转轴滚花机用机械手。背景技术:1、电机转轴滚花是通过专门的滚花刀具或滚花机,利用轴承座上的工作转台,利用滚花刀在轴上滚压出一定花纹,从而提高电机转轴的表......
-
一种车间生产用多轴体机械手的制作方法
本发明涉及机械生产加工,尤其是一种车间生产用多轴体机械手。背景技术:1、机械手是一种能够模拟人手和手臂动作功能的自动操作装置,它由多个部分协同运作,通常而言,其包含执行机构,比如用于直接接触并抓取物件......
-
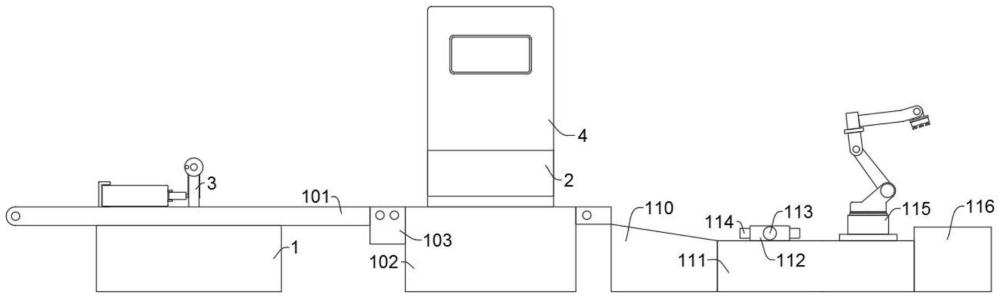
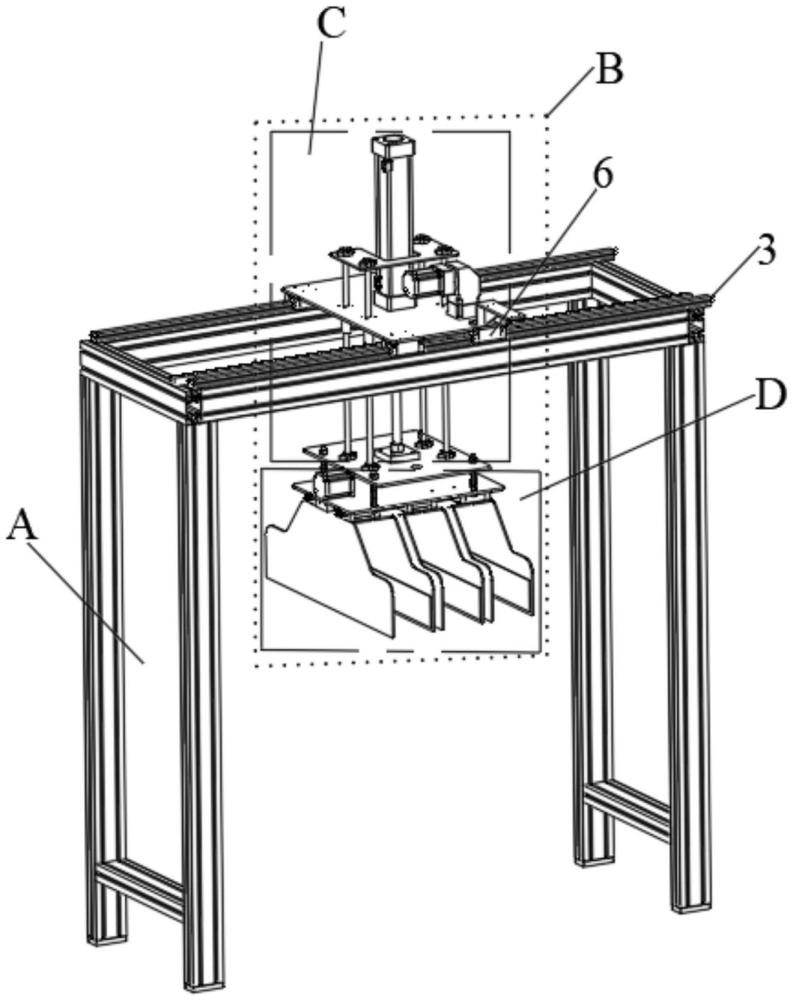
一种基于机械手推送的汽车钣金件传送检测设备的制作方法
本发明涉及钣金工艺外观检测,具体为一种基于机械手推送的汽车钣金件传送检测设备。背景技术:1、钣金有时也称作扳金,一般是将一些金属薄板通过手工或模具冲压使其产生塑性变形,形成所希望的形状和尺寸,并可进一......
-
一种注塑机摆臂机械手的制作方法
本技术涉及机械手,具体涉及一种注塑机摆臂机械手。背景技术:1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构......
-
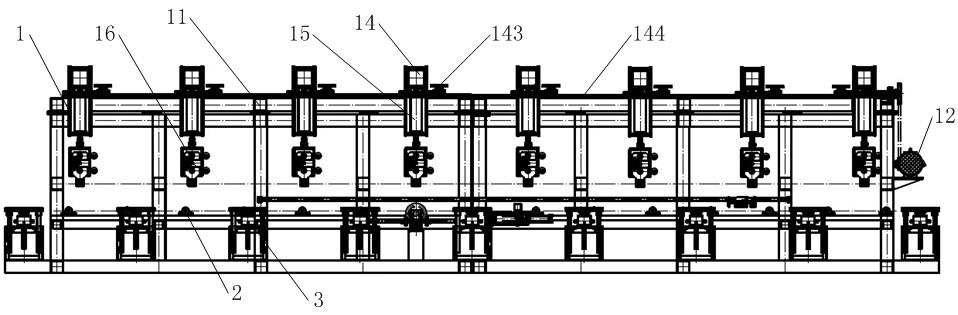
一种多台冲床多工位精密移送机械手的制作方法
本技术涉及机械手领域,尤其涉及一种多台冲床多工位精密移送机械手。背景技术:1、机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,机械手是最早出现的工业机器人,也......
-
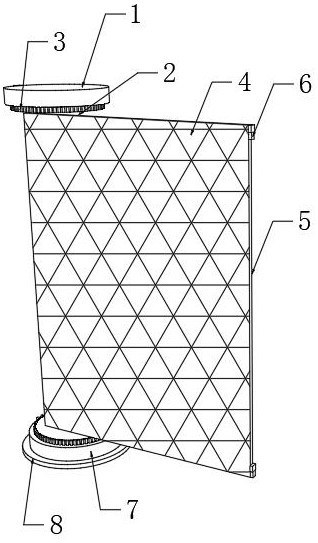
一种机械手防护安全围网的制作方法
本技术涉及防护网,具体为一种机械手防护安全围网。背景技术:1、很多工厂流水线已经使用了机械手进行辅助,机械手具有不疲劳、抓取量大等优点,同时,由于其工作时具有较大幅度的摆动和转动,在其流水线附近形成一......
-
一种吸盘安装机构及柔性机械手的制作方法
本技术涉及工业机械手,特别是一种吸盘安装机构及柔性机械手。背景技术:1、吸盘安装机构通常用于工业自动化和机器人技术中,其基本原理是利用真空吸附或气压差来吸附和移动物体。工作原理为:当需要吸附物体时,气......
-
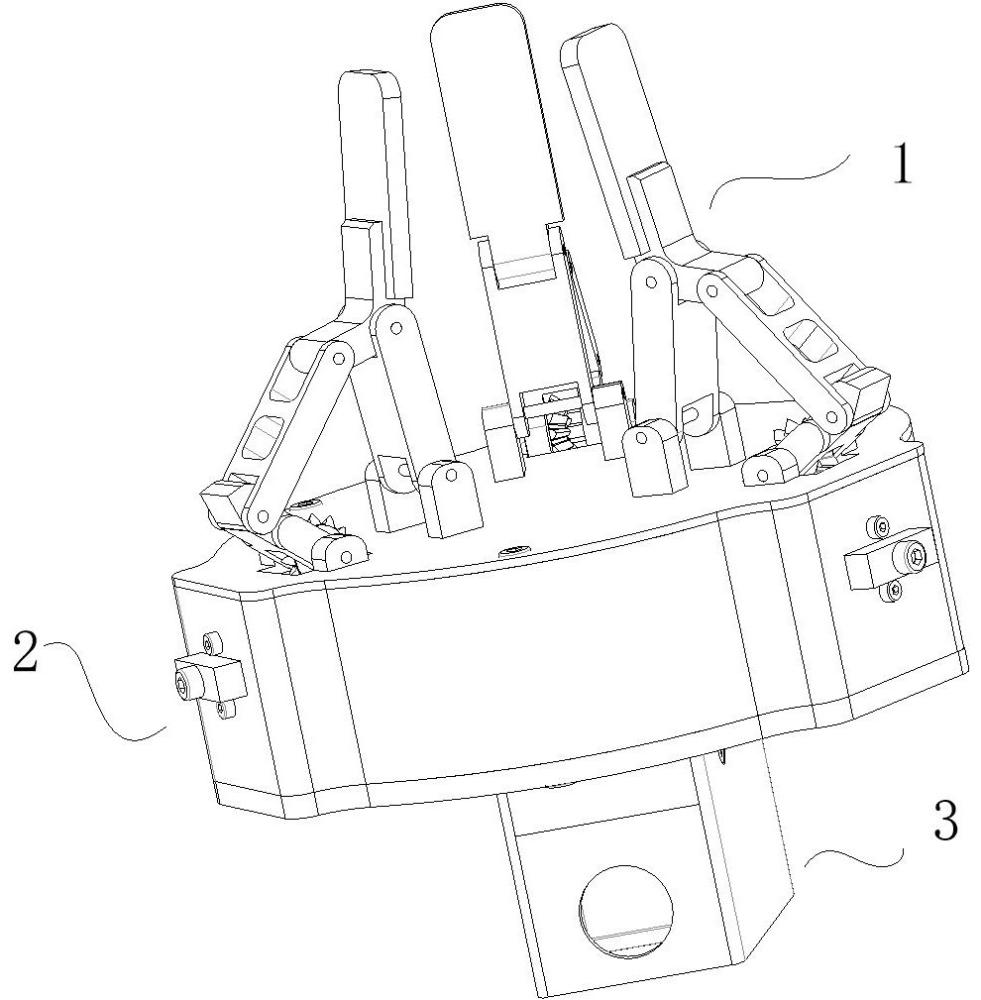
一种基于绳驱动的单驱自适应三指机械手
本发明涉及机器人,尤其是涉及一种基于绳驱动的单驱自适应三指机械手。背景技术:1、在机器人技术领域,机械手的设计和应用一直是自动化和智能制造的关键组成部分。随着工业4.0和智能制造的发展,对机械手的性能......
-

一种水下软体机械手、水下机器人及其抓取方法
本发明属于机械人,涉及水下机械手的改进,具体说是一种水下软体机械手、水下机器人及其抓取方法。背景技术:1、水下机器人在海洋工程、科学研究和资源勘探等领域具有广泛的应用。机械手作为水下机器人的关键部件之......
-
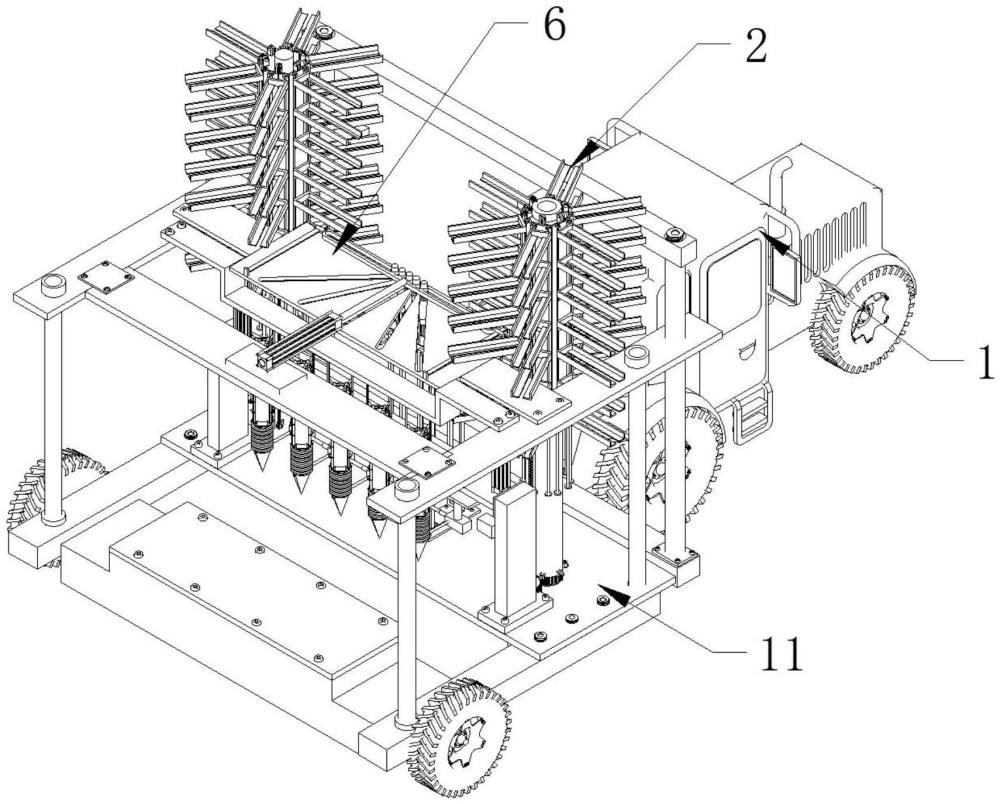
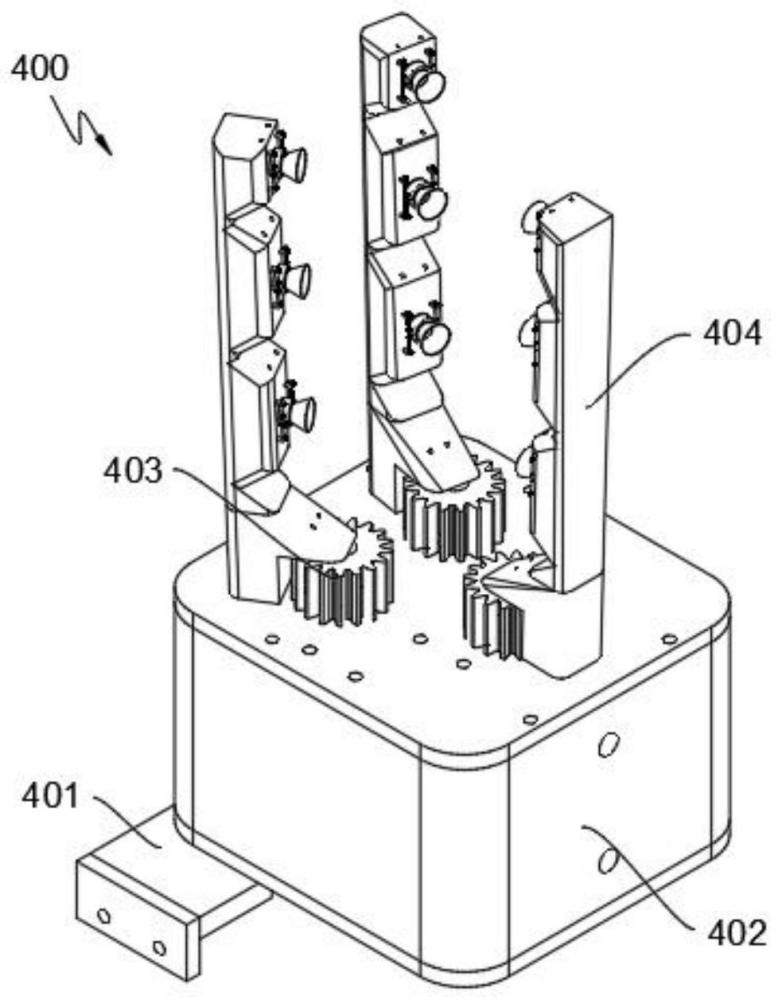
一种大棚低植栽培操作机械手的制作方法
本发明涉及低值栽种,尤其涉及一种大棚低植栽培操作机械手。背景技术:1、低植栽培是一种特定的农业种植技术,其主要目的是通过控制植株的生长高度和形态,实现高效的种植和管理。低植栽培通常用于蔬菜、草药、水果......
-

机械手的抓取组件的制作方法
本发明涉及机械加工设备领域,特别涉及一种机械手的抓取组件。背景技术:1、随着中国工业制造的发展,国内很多的产品都是由机械设备加工制造形成。其中,在现有技术中,由于产品一般是多样化的,绝大部分的加工机床......
-

一种带有机械手的实验室用烤箱及使用方法
本发明涉及烘烤设备,具体地说,涉及一种带有机械手的实验室用烤箱及使用方法。背景技术:1、烤箱是一种烘烤器具,烤箱是密封并加热待烤物的设备,并且可根据其热源分为电型、燃气型和电子型。2、实验室中常用到电......
-
变刚度机构以及灵巧机械手的制作方法
本发明涉及一种机械手,尤其涉及的是一种机械手的变刚度机构。背景技术:1、五指灵巧手是机器人末端执行部件的重要部件,一般安装于机器人腕部的末端,是直接执行任务的装置。五指灵巧手作为机器人与环境相互作用的......
-
一种物料换箱机械手的制作方法
本申请属于机械设备,尤其是涉及一种物料换箱机械手。背景技术:1、物料在成型后,需将物料放入人工准备好的空箱子内,人工长时间操作会降低了工作效率,同时提高了人员的疲劳强度,因此有必要进行改进。2、随着工......
-
一种多角度柔性仿生机械手的制作方法
本发明涉及仿生机械手,特别涉及一种多角度柔性仿生机械手。背景技术:1、仿生机械手的设计与开发,是近年来机器人技术领域的一个重要研究方向,它结合了仿生学、材料科学、传感器技术、控制理论和机械工程等多个学......
-
一种适用机械手直接上下料的自动试样激光切割机的制作方法
本发明涉及试样激光切割,具体涉及一种适用机械手直接上下料的自动试样激光切割机。背景技术:1、冶炼钢厂在生产板材时必须对钢材的化学成分和力学性能进行检测,以掌握钢材是否符合质量要求。在当前的条件下,板材......
-

一种发药机用上药机械手结构及药品搜索定位系统的制作方法
本发明涉及药房自动化,具体涉及一种发药机用上药机械手结构及药品搜索定位系统。背景技术:1、随着社会的不断发展和科技的持续进步,一些医院的药房已经引进了快速自动发药系统。但给快速自动发药系统补药依旧是目......
-
一种交互式机械手及其交互方法
本发明涉及机器人,更具体地说,它涉及一种交互式机械手及其交互方法。背景技术:1、对于清洁机器人来说其路径规划可以是由图像传感器或雷达传感器进行检测然后实时的规划路径,也可以是预先在需要作业的场地划定路......
-
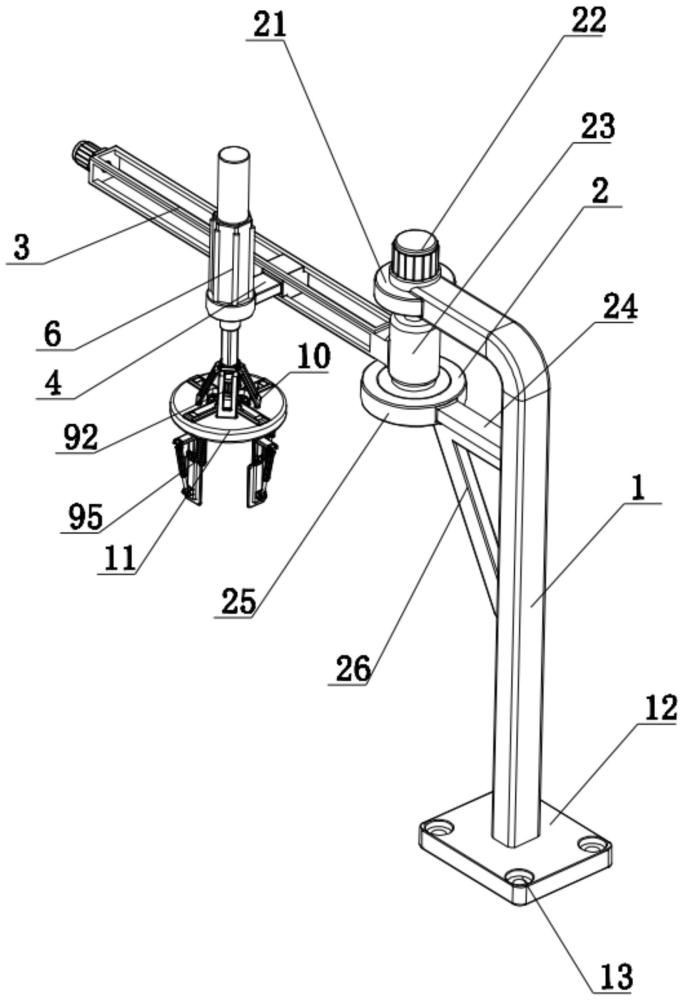
一种注塑成型炒锅手柄生产线用转运机械手的制作方法
本发明涉及智能制造装备产业,具体为一种注塑成型炒锅手柄生产线用转运机械手。背景技术:1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编......
-
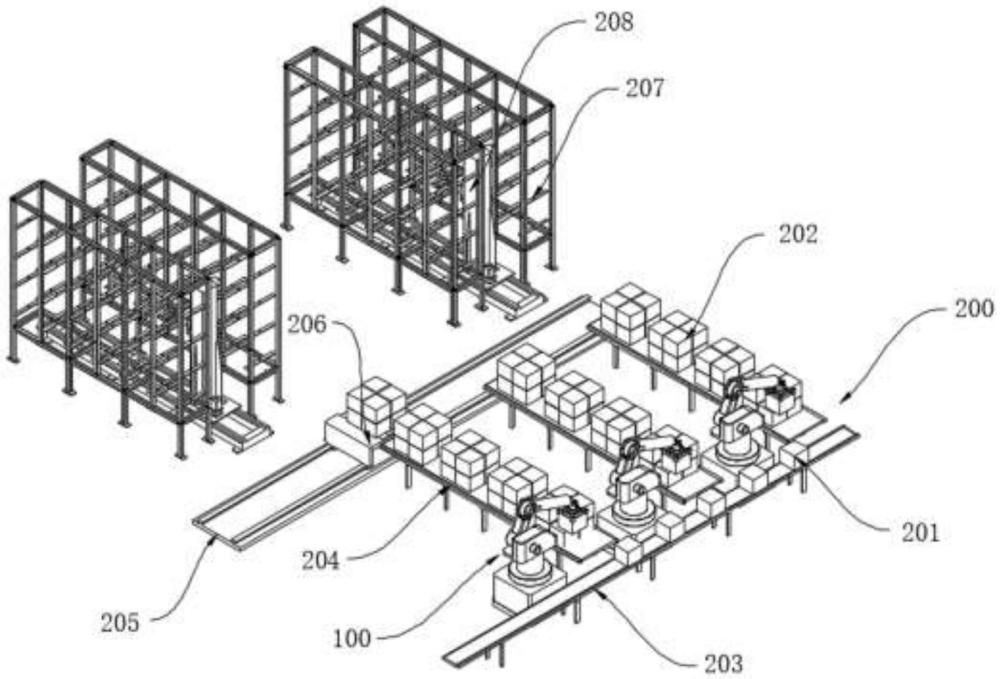
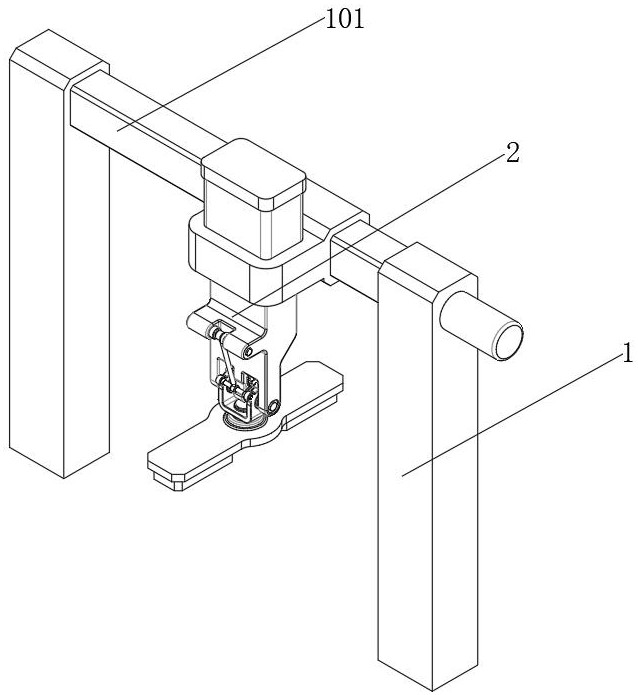
一种包装盒抓取机械手的制作方法
本发明涉及自动化立体仓库,具体为一种包装盒抓取机械手。背景技术:1、自动化立体仓库是物流仓储领域的一个新概念,代表了当前技术水平较高的仓储形式。它利用立体仓库设备实现仓库高层合理化、存取自动化以及操作......
-
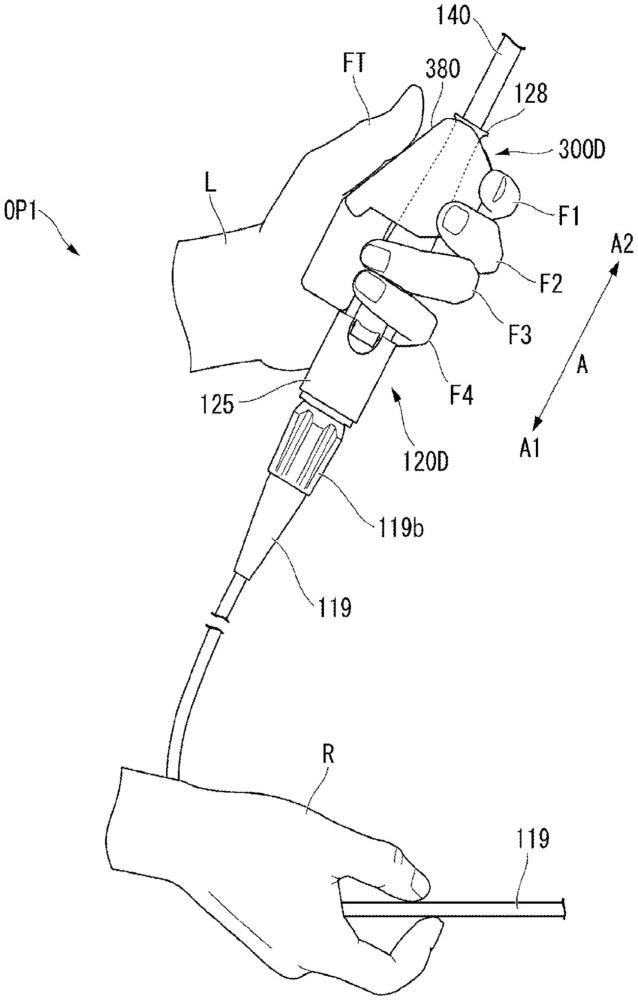
医疗用机械手系统和操作装置的制作方法
本发明涉及医疗用机械手系统。本申请基于在2022年02月28日在美国临时提出申请的美国专利临时申请第63/314579号而主张优先权,并将其内容引用于此。背景技术:1、以往,使用了用于消化道等管腔器官......
-
使用模块化致动的旋转分播墙的机械手式订单合并的制作方法
本公开的示例性实施方案整体涉及物料搬运环境中的分播墙,并且更具体地涉及使用分播墙传送物品的方法和系统。背景技术:1、订单处理是在操作存储设施或物料搬运环境以履行订单时要考虑的最重要工作流程之一。订单处......
-
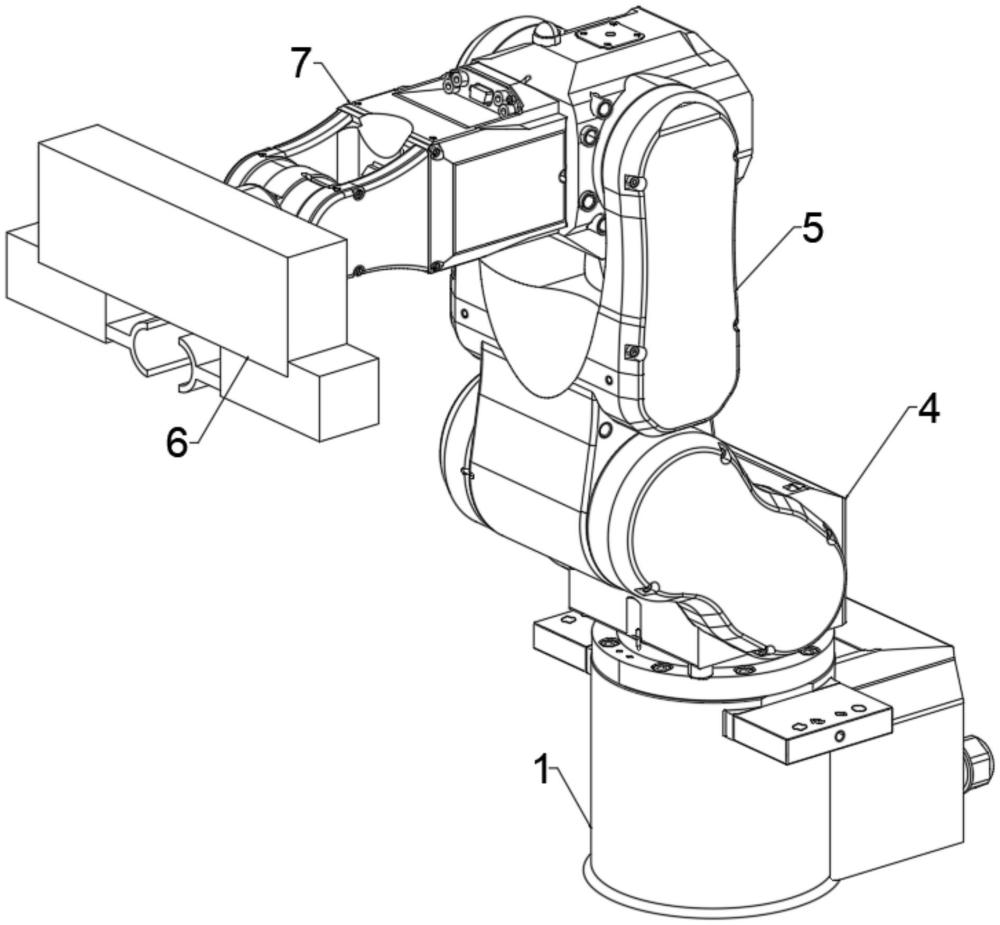
一种高精度多倍速多轴机械手机构的制作方法
本发明涉及机械手结构,尤其涉及一种高精度多倍速多轴机械手机构。背景技术:1、钣金件在用途上非常广泛,在工业生产中钣金件是采用冲压成形,而在现有技术的冲压生产中,对钣金件的上料、下料是采用人工操作进行的......
技术新讯 > 机械手 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01