一种高精度多倍速多轴机械手机构的制作方法
- 国知局
- 2024-10-09 14:53:31
本发明涉及机械手结构,尤其涉及一种高精度多倍速多轴机械手机构。
背景技术:
1、钣金件在用途上非常广泛,在工业生产中钣金件是采用冲压成形,而在现有技术的冲压生产中,对钣金件的上料、下料是采用人工操作进行的,采用人工上、下料首先存在效率较低的问题,其次人工上料在物料的定位上存在定位不准的情况,影响工件的加工质量,最后,人工上下料存在机器伤人现象,不安全。
2、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
3、现有采用机械手进行物料运输能够提高物料运输效率,但现有钣金生产线机械手组件抓取精度较低,且运输速度较慢,生产效率不高,具有较大的改进空间。
4、现需要一种新型的多轴机械手组件,能够解决上述所提出的问题。
技术实现思路
1、本发明提供了一种高精度多倍速多轴机械手机构,通过对现有机械手组件进行技术改造,解决了现有转运机构工作效率较低,运输精度较低的问题。
2、为实现上述目的,本发明采用的技术方案是:
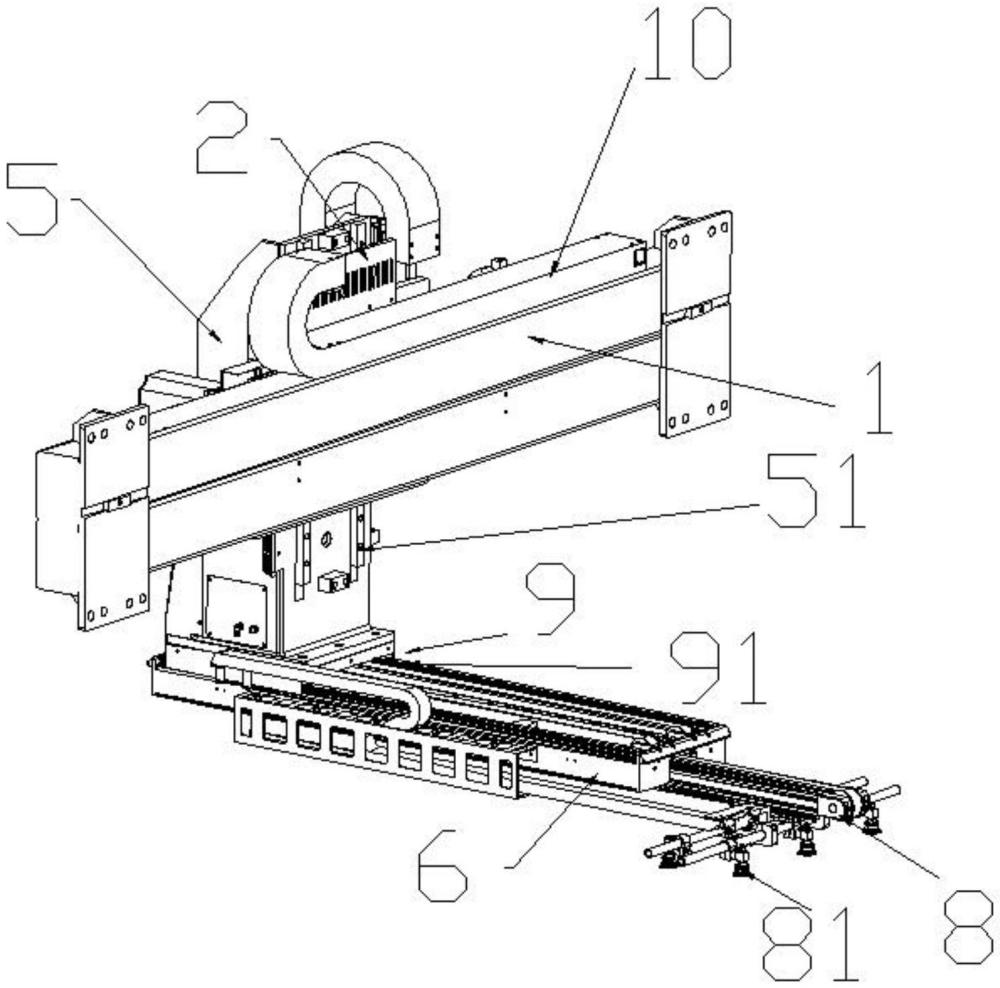
3、一种高精度多倍速多轴机械手机构,包括第一安装板、活动安装板、z轴驱动组件、y轴驱动组件、连接支撑座、水平安装框架、x轴驱动组件和吸盘安装架组件,所述第一安装板正立面固定安装在生产线机台上,所述第一安装板背立面活动安装有活动安装板,所述活动安装板上安装设置有z轴驱动组件,所述z轴驱动组件用于带动活动安装板相对第一安装板沿z轴方向运动设置,所述活动安装板上还安装设置有y轴驱动组件和连接支撑座,所述连接支撑座活动安装在活动安装板上,所述y轴驱动组件输出端与连接支撑座相连,所述y轴驱动组件用于带动连接支撑座相对活动安装板沿竖直方向上运动,所述连接支撑座底部活动安装有水平安装框架,连接支撑座内安装有x轴驱动组件,水平安装框架内活动安装设置有吸盘安装架组件,所述x轴驱动组件用于带动吸盘安装架组件在x轴方向上运动,所述吸盘安装架组件上安装设置有用于吸取物料的真空吸盘,所述z轴驱动组件、y轴驱动组件、x轴驱动组件与主控系统电连接设置。
4、优选的,所述第一安装板背面上下两侧水平固定安装有两条水平设置的第一滑轨,所述活动安装板背面设置有第一滑块,所述活动安装板通过第一滑块活动安装在所述第一滑轨上。
5、优选的,所述z轴驱动组件包括z轴驱动电机和z轴驱动齿轮,所述第一安装板背面固定安装有水平设置的第一活动齿条,所述z轴驱动电机固定安装在活动安装板上,z轴驱动电机输出端穿出活动安装板与z轴驱动齿轮相连,所述z轴驱动齿轮与第一活动齿条驱动连接。
6、优选的,所述连接支撑座靠近活动安装板的一面固定安装有竖直设置的第二滑轨,所述活动安装板上相对连接支撑座的一面固定安装有第二滑块,所述活动安装板通过第二滑块活动安装在所述连接支撑座的第二滑轨上。
7、优选的,所述y轴驱动组件包括y轴驱动电机和y轴驱动齿轮,所述y轴驱动电机固定安装在活动安装板上,所述y轴驱动电机输出端连接有y轴驱动齿轮,所述连接支撑座侧面固定安装有竖直方向的第二活动齿条,所述y轴驱动齿轮与第二活动齿条驱动连接设置。
8、优选的,所述水平安装框架通过缓冲结构与连接支撑座相连,所述缓冲结构包括第三水平滑轨和第三滑块组件,水平安装框架上表面固定安装有第三水平滑轨,所述连接支撑座底面固定安装有第三滑块,所述第三滑块活动安装在所述第三水平滑轨上,且连接支撑座底部和水平安装框架之间连接有电缆拖链。
9、优选的,所述水平安装框架内安装架设有两条相互平行设置的皮带轮组件,所述皮带轮组件的皮带上安装有固定连接件,所述固定连接件还与吸盘安装架组件相连,所述x轴驱动组件与吸盘安装架组件驱动连接设置。
10、优选的,所述x轴驱动组件包括x轴驱动电机和x轴驱动齿轮,所述吸盘安装架组件包括活动框架、第二皮带轮组件、第二固定连接件和吸盘安装座,所述活动框架与水平安装框架内的固定连接件相连,所述活动框架中间安装有第二皮带轮组件,所述第二皮带轮组件上侧的皮带上固定安装有水平设置的第三活动齿条,x轴驱动组件输出端连接有x轴驱动齿轮,所述x轴驱动齿轮与第三活动齿条驱动连接设置,所述第二皮带轮组件下侧的皮带上固定安装有第二固定连接件,所述第二固定连接件下方与吸盘安装座固连设置,真空吸盘安装设置在吸盘安装座上。
11、优选的,所述活动框架底面固定安装设置有第四滑轨,所述吸盘安装座上表面固定安装有第四滑块,所述吸盘安装座通过第四滑块活动安装在活动框架的第四滑轨上。
12、优选的,所述吸盘安装座上穿设有固定横杆,所述固定横杆上位于吸盘安装座左右两侧间隔布置安装有若干真空吸盘。
13、本发明的有益效果在于:
14、本发明活动安装板通过第一滑块活动安装在第一滑轨上,通过z轴驱动电机带动z轴驱动齿轮转动,z轴驱动齿轮与第一活动齿条驱动连接,第一安装板对活动安装板进行支撑,z轴驱动电机带动活动安装板在z轴方向上活动,连接支撑座上安装有第二滑轨,活动安装板上设置的第二滑块活动安装在第二滑轨上,且连接支撑座侧面固定安装有竖直方向的第二活动齿条,活动安装板上安装的y轴驱动电机带动y轴驱动齿轮转动,从而带动连接支撑座相对活动安装板在y轴方向上运动,连接支撑座底面安装有水平安装框架,水平安装框架内安装有吸盘安装架组件,连接支撑座内安装的x轴驱动电机带动x轴驱动齿轮,x轴驱动齿轮与吸盘安装架组件上设置的第三活动齿条驱动连接,第三活动齿条带动吸盘安装架组件设置的第二皮带轮组件转动,从而实现第二皮带轮组件底部固定的吸盘安装座在x轴方向活动,吸盘安装座上安装的真空吸盘吸取物料,通过主控系统控制x轴驱动组件、y轴驱动组件和z轴驱动组件的运动行程从而实现精确控制物料的运输。
15、本发明在使用时,主控系统能够控制x轴驱动组件、y轴驱动组件和z轴驱动组件带动吸盘安装架组件运动到物料正上方位置,通过真空吸盘将物料吸取,再通过x,y,z三轴驱动组件将物料转运到下一工位,将物料自动卸下,输送稳定性高,运输工作效率高,也保障了工作人员的人身安全。
16、本发明驱动电机直接与驱动齿轮相连,由于电动机的转速可以任意调节,从而可以任意地调节机械手x轴驱动组件、y轴驱动组件和z轴驱动组件的运动速度,实现无极调节,能够完成更加精确的运动,工作效率更高。用户可以通过减速拉延加工实现或者保持恒定的冲压运动速度,这样不仅可以提高板材加工的质量,而且也可延长模具的使用寿命。
技术特征:1.一种高精度多倍速多轴机械手机构,其特征在于,包括第一安装板、活动安装板、z轴驱动组件、y轴驱动组件、连接支撑座、水平安装框架、x轴驱动组件和吸盘安装架组件,所述第一安装板正立面固定安装在生产线机台上,所述第一安装板背立面活动安装有活动安装板,所述活动安装板上安装设置有z轴驱动组件,所述z轴驱动组件用于带动活动安装板相对第一安装板沿z轴方向运动设置,所述活动安装板上还安装设置有y轴驱动组件和连接支撑座,所述连接支撑座活动安装在活动安装板上,所述y轴驱动组件输出端与连接支撑座相连,所述y轴驱动组件用于带动连接支撑座相对活动安装板沿竖直方向上运动,所述连接支撑座底部活动安装有水平安装框架,连接支撑座内安装有x轴驱动组件,水平安装框架内活动安装设置有吸盘安装架组件,所述x轴驱动组件用于带动吸盘安装架组件在x轴方向上运动,所述吸盘安装架组件上安装设置有用于吸取物料的真空吸盘,所述z轴驱动组件、y轴驱动组件、x轴驱动组件与主控系统电连接设置。
2.根据权利要求1所述的一种高精度多倍速多轴机械手机构,其特征在于,所述第一安装板背面上下两侧水平固定安装有两条水平设置的第一滑轨,所述活动安装板背面设置有第一滑块,所述活动安装板通过第一滑块活动安装在所述第一滑轨上。
3.根据权利要求1所述的一种高精度多倍速多轴机械手机构,其特征在于,所述z轴驱动组件包括z轴驱动电机和z轴驱动齿轮,所述第一安装板背面固定安装有水平设置的第一活动齿条,所述z轴驱动电机固定安装在活动安装板上,z轴驱动电机输出端穿出活动安装板与z轴驱动齿轮相连,所述z轴驱动齿轮与第一活动齿条驱动连接。
4.根据权利要求1所述的一种高精度多倍速多轴机械手机构,其特征在于,所述连接支撑座靠近活动安装板的一面固定安装有竖直设置的第二滑轨,所述活动安装板上相对连接支撑座的一面固定安装有第二滑块,所述活动安装板通过第二滑块活动安装在所述连接支撑座的第二滑轨上。
5.根据权利要求1所述的一种高精度多倍速多轴机械手机构,其特征在于,所述y轴驱动组件包括y轴驱动电机和y轴驱动齿轮,所述y轴驱动电机固定安装在活动安装板上,所述y轴驱动电机输出端连接有y轴驱动齿轮,所述连接支撑座侧面固定安装有竖直方向的第二活动齿条,所述y轴驱动齿轮与第二活动齿条驱动连接设置。
6.根据权利要求1所述的一种高精度多倍速多轴机械手机构,其特征在于,所述水平安装框架通过缓冲结构与连接支撑座相连,所述缓冲结构包括第三水平滑轨和第三滑块组件,水平安装框架上表面固定安装有第三水平滑轨,所述连接支撑座底面固定安装有第三滑块,所述第三滑块活动安装在所述第三水平滑轨上,且连接支撑座底部和水平安装框架之间连接有电缆拖链。
7.根据权利要求6所述的一种高精度多倍速多轴机械手机构,其特征在于,所述水平安装框架内安装架设有两条相互平行设置的皮带轮组件,所述皮带轮组件的皮带上安装有固定连接件,所述固定连接件还与吸盘安装架组件相连,所述x轴驱动组件与吸盘安装架组件驱动连接设置。
8.根据权利要求7所述的一种高精度多倍速多轴机械手机构,其特征在于,所述x轴驱动组件包括x轴驱动电机和x轴驱动齿轮,所述吸盘安装架组件包括活动框架、第二皮带轮组件、第二固定连接件和吸盘安装座,所述活动框架与水平安装框架内的固定连接件相连,所述活动框架中间安装有第二皮带轮组件,所述第二皮带轮组件上侧的皮带上固定安装有水平设置的第三活动齿条,x轴驱动组件输出端连接有x轴驱动齿轮,所述x轴驱动齿轮与第三活动齿条驱动连接设置,所述第二皮带轮组件下侧的皮带上固定安装有第二固定连接件,所述第二固定连接件下方与吸盘安装座固连设置,真空吸盘安装设置在吸盘安装座上。
9.根据权利要求8所述的一种高精度多倍速多轴机械手机构,其特征在于,所述活动框架底面固定安装设置有第四滑轨,所述吸盘安装座上表面固定安装有第四滑块,所述吸盘安装座通过第四滑块活动安装在活动框架的第四滑轨上。
10.根据权利要求8所述的一种高精度多倍速多轴机械手机构,其特征在于,所述吸盘安装座上穿设有固定横杆,所述固定横杆上位于吸盘安装座左右两侧间隔布置安装有若干真空吸盘。
技术总结本发明提供了一种高精度多倍速多轴机械手机构,包括第一安装板、活动安装板、Z轴驱动组件、Y轴驱动组件、连接支撑座、水平安装框架、X轴驱动组件和吸盘安装架组件,第一安装板背立面活动安装有活动安装板,所述活动安装板上安装设置有Z轴驱动组件,所述活动安装板上还安装设置有Y轴驱动组件和连接支撑座,所述Y轴驱动组件输出端与连接支撑座相连,所述连接支撑座底部活动安装有水平安装框架,连接支撑座内安装有X轴驱动组件,水平安装框架内活动安装设置有吸盘安装架组件,所述Z轴驱动组件、Y轴驱动组件、X轴驱动组件与主控系统电连接设置。本发明输送稳定性高,运输工作效率高,也保障了工作人员的人身安全。技术研发人员:任瑞兰,任平受保护的技术使用者:东莞市济淞科技有限公司技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/306857.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。