一种新型协作机器人高度调节和自锁装置
- 国知局
- 2024-10-21 14:22:22
本发明属于协作机器人设备,具体设计一种新型协作机器人高度调节和自锁装置。
背景技术:
1、现有的机器人底座一般是直接固定在地面或者使用一个小轮子来实现移动,通过手动转动丝杠来实现橡胶垫与地面紧密接触,通过增大地面和橡胶垫之间的摩擦来实现固定,这样很大程度上增加了复杂度也不能够实现节省时间的效果,而且及其不方便。同时,因为支撑架的高度固定,不能够实现调节导致患者所在的位置过高或者过低都不能够实现调节,给患者和医生带来了极大的不便。
技术实现思路
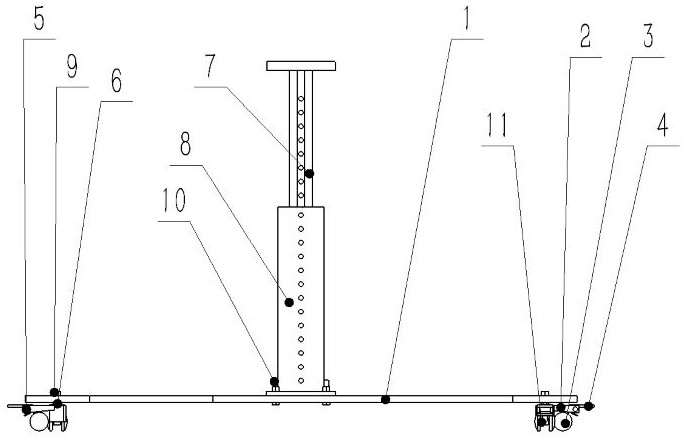
1、本发明针对上述问题提供了一种新型协作机器人高度调节和自锁装置来解决此问题,该协作机器人高度调节和自锁装置主要包括:底座、车轮架构、车轮、曲面橡胶垫、销钉、螺栓、伸缩杆、套筒、螺母、长螺栓、双头螺栓,所述车轮通过双头螺栓把其固定在车轮架构,所述曲面橡胶垫通过销钉和车轮架构链接在一起,所述车轮架构和底座通过螺栓链接实现与底座的固定,所述套筒和底座通过长螺栓和螺母链接与底座固定。
2、进一步的,所述伸缩装置通过销钉来实现套筒和伸缩杆的固定。
3、进一步的,所述车轮与车轮架构通过通过双头螺栓固定。
4、进一步的,所述伸缩杆和套筒通过滑槽来配合链接。
5、进一步的,所述曲面橡胶垫通过和轮胎产生摩擦而自锁。
6、与现有技术相比,本发明的有益效果是:将传统的协作机器人固定装置改造为一个高度可调节且能自锁的协作机器人移动装置,这样便可以使协作机器人的挪动更加的方便,而且到达指定位置后可以通过扳动自锁装置固定底座位置。同时协作机器人在工作中要根据患者位置和病灶角度来调节移动距离和高度,特殊情况需要距离、高度变化过大时普通底座就会显得非常不便,新型协作机器人高度调节分为多个梯次,增加了协作机器人的灵活性和机动性,提高了协作机器人的精准性和工作效率,增加了患者的安全保障。
技术特征:1.一种新型协作机器人高度调节和自锁装置,协作机器人可以直接安装在该移动装置上。其特征是:底座(1)、车轮架构(2)、车轮(3)、曲面橡胶垫(4)、销钉(5)、螺栓(6)、伸缩杆(7)、套筒(8)、螺母(9)、长螺栓(10)、双头螺栓(11),所述曲面橡胶垫(4)通过销钉(5)和车轮架构(2)链接在一起,车轮(3)与车轮架构(2)通过通过双头螺栓(11)链接,车轮架构(2)和底座(1)通过螺栓(6)链接实现与底座(1)的固定,伸缩杆(7)和套筒(8)通过滑槽来配合链接、通过销钉(5)来实现伸缩装置固定,套筒(8)和底座(1)通过长螺栓(10)和螺母(9)链接与底座(1)固定。
2.根据权利要求1所述的一种新型协作机器人高度调节和自锁装置,其特征是:该伸缩装置是由一个套筒(8)加一根伸缩杆(7)组成,两者通过滑动凹槽配合在一起,滑动凹槽采用两个矩形的凹槽在套筒内壁两侧,伸缩杆(7)可通过在凹槽内滑动的原理实现伸缩装置的伸缩功能,该套筒(8)和伸缩杆(7)上有13个直径为1厘米的销孔均匀排列,可通过销钉(5)来固定套筒(8)和伸缩杆(7)的位置,套筒(8)和底座(1)通过长螺栓(10)和螺母(9)进行固定链接,该构型使伸缩装置更加顺滑、不易产生变形,而且更加稳定。
3.根据权利要求1所述的一种新型协作机器人高度调节和自锁装置,其特征是:曲面橡胶垫(4)通过销钉(5)和车轮架构(2)链接在一起,车轮(3)与车轮架构(2)通过通过双头螺栓(11)链接,车轮架构(2)和底座(1)通过螺栓(6)链接实现与底座(1)的固定,该底座由四个着力点支撑,呈90度圆周分布,使其更加的稳固,四角采用四个突出的矩形块在矩形块的末端安装自锁移动装置、并在矩形块末端进行倒圆角,增加了安全性和美观性,并降低了加工难度和加工成本。
技术总结本发明公开了一种新型协作机器人高度调节和自锁装置,属于协作机器人设备技术领域。协作机器人在工作中要根据患者位置和病灶角度来调节移动距离和高度,特殊情况需要距离、高度变化过大时普通底座就会显得非常不便,所以给协作机器人配备一种高度可调节和移动自锁的底座装置是至关重要的。本发明组成包括:两车轮和轮子支撑架构通过双头螺栓链接,曲面橡胶垫和整体轮子支撑架构通过销钉链接,轮子支撑架构和底座通过螺栓和螺母链接,套筒通过长螺栓和螺母与底座链接,伸缩杆与套筒通过滑槽配合进行滑动借助销钉来进行固定。新型协作机器人高度调节和自锁装置增加了协作机器人的灵活性和机动性、提高了工作效率,增加了安全保障。技术研发人员:赵洪华,杨照辉,田倩倩,鲁守银,刘占杰,孙成豪,张跃忠,王超,吴鹏,宋现明,王景瀚,孙兆国,曹宝璐,朱连江,孙选,董全成受保护的技术使用者:济南大学技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/317909.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。