一种新型医疗机器人末端提拉装置
- 国知局
- 2024-10-21 14:22:22
本发明属于医疗机器人设备,具体涉及一种新型医疗机器人末端提拉装置。
背景技术:
1、随着人工智能的不断发展,机器人在各场景中的运用逐步增多,目前机器人在医疗领域蓬勃发展。医疗机器人末端设计也在急速发展,医疗手术机器人传统末端功能单一,在面对复杂的手术环境时不能够达到医生的使用要求,极大的限制了医疗机器人的工作环境,导致大部分场景下医疗手术机器人不能够进行手术,这给很多医院医生带来了极大的不便。为了解决以上问题,设计一种新型医疗机器人末端提拉装置。
技术实现思路
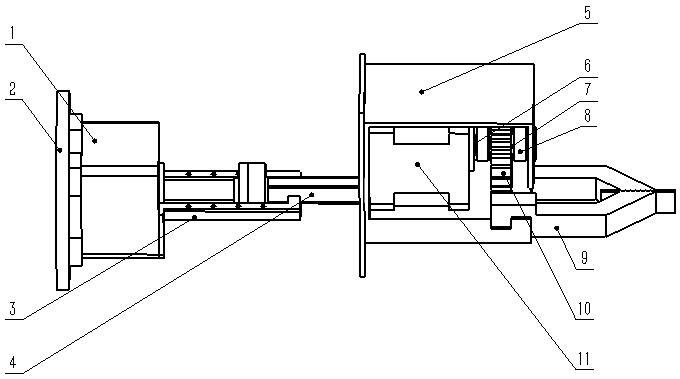
1、本发明针对上述问题提供了一种新型医疗机器人末端提拉装置来解决此问题,该新型医疗机器人末端提拉装置主要包括:提拉电机、连接法兰、套筒、伸缩杆、夹爪底座、大垫片、小垫片、轴承、齿条夹爪、齿轮、夹持电机,所述连接法兰与机械臂末端通过螺钉链接,所述提拉电机和连接法兰通过螺钉进行连接,所述套筒和连接法兰通过螺钉链接,所述夹爪底座和伸缩杆通过螺钉进行连接,所述夹持电机和夹爪底座通过螺钉进行连接,所述齿轮和提拉电机通过大垫片和小垫片、轴承来进行连接,齿条夹爪和夹持电机通过齿轮进行连接。
2、进一步的,所述提拉电机通过转动带动丝杠移动进而实现伸缩杆的提拉运动。
3、进一步的,所述夹持电机通过转动带动齿轮转动,进而齿轮通过转动来实现齿条夹爪的夹持动作。
4、进一步的,所述夹持电机和轴承之间放一个大垫片,齿轮和轴承之间通过小垫片来支撑轴承和齿轮防止轴承和齿轮相对运动产生摩擦。
5、与现有技术相比,本发明的有益效果是:末端提拉装置是利用步进电机控制丝杠运动来。
6、实现末端的提拉动作,步进电机控制丝杠运动可以有效地提高运动的精度,步进电机具有优秀的启停和反转响应,使末端的提拉动作更加的流畅精准。末端的夹持动作通过电机带动齿轮转动,齿轮通过转动来促使齿条夹爪运动实现夹爪的夹持动作,齿轮齿条运动能够使夹爪运动更加的平稳、寿命长,可靠性高。新型医疗机器人末端提拉装置实现了末端加持、提拉两种功能,增强了医疗机器人的末端灵活性和手术的安全保障。
技术特征:1.一种新型医疗机器人末端提拉装置,其特征是:提拉电机(1)、连接法兰(2)、套筒(3)、伸缩杆(4)、夹爪底座(5)、大垫片(6)、小垫片(7)、轴承(8)、齿条夹爪(9)、齿轮(10)、夹持电机(11),所述连接法兰(2)与机械臂末端通过螺钉链接,所述提拉电机(1)和连接法兰(2)通过螺钉进行连接,所述套筒(3)和连接法兰(2)通过螺钉链接,所述夹爪底座(5)和伸缩杆(4)通过螺钉进行连接,所述夹持电机(11)和夹爪底座(5)通过螺钉进行连接,所述齿轮(10)和提拉电机(11)通过大垫片(6)和小垫片(8)、轴承(8)来进行连接,齿条夹爪(9)和夹持电机(11)通过齿轮(10)进行连接。
2.如权利要求1所述一种新型医疗机器人末端提拉装置,其特征是:所述提拉电机(1)通过转动带动丝杠移动进而实现伸缩杆(4)的提拉运动。
3.如权利要求1所述一种新型医疗机器人末端提拉装置,其特征是:所述夹持电机(11)通过转动带动齿轮转动,进而通过齿轮转动来实现齿条夹爪的夹持动作。
4.如权利要求1所述一种新型医疗机器人末端提拉装置,其特征是:所述夹持电机(11)和轴承(8)之间放一个大垫片(6),齿轮(10)和轴承(8)之间通过小垫片来支撑轴承和齿轮防止轴承和齿轮相对运动产生摩擦。
技术总结本发明公布了一种新型医疗机器人末端提拉装置,属于医疗机器人设备技术领域。传统的医疗手术机器人末端只能实现加持的动作,限制了医疗机器人的操作,所以急需设计一种能够实现提拉、夹持多种动作的末端。本发明组成包括:链接法兰和提拉电机通过螺钉进行链接,套筒和提拉电机通过螺钉连接,伸缩杆和夹爪底座通过螺钉链接,电机和齿轮通过垫片和轴承链接,加持电机通过转动来带动齿轮运动,齿条通过齿轮运动实现加紧、松开动作。新型医疗机器人末端提拉装置实现了末端加持、提拉两种功能,增强了医疗机器人的末端灵活性和手术的安全保障。技术研发人员:赵洪华,王超,杨照辉,田倩倩,鲁守银,孙成豪,宋现明,张跃忠,宋家光,吴鹏,曹宝璐,朱良受保护的技术使用者:济南大学技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/317908.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表