用于立体仓库的轨道机器人及智能仓储系统的制作方法
- 国知局
- 2024-09-19 14:48:55
本技术涉及仓储设备,特别是涉及一种用于立体仓库的轨道机器人及智能仓储系统。
背景技术:
1、在现代商业活动、工业活动及居民生活服务领域中,储存和管理大量不同尺寸和种类繁多的物品是一项重要需求。这些物品具有种类多、数量大的特点,传统的货架式管理在面对巨量中小商品的物流转运和储存时显得非常不便利。例如,军工制品、半导体芯片、涉密档案、药品等需要高安全级别的物品,其现代自动化管理需求逐渐增大。这些物品在储存时需要符合安全、智能、密集存储的要求。然而,传统的储存方法占地面积大,周转效率低,调取困难,且耗费大量人力,难以应对日益增长的储存需求,并且也不适应现代化的仓储技术发展。
2、此外,在电子商务的小件商品中转仓库中,高效率、高密度地存取多种多样且数量巨大的中小尺寸物品,并根据需要准确高效地分拣和运送至下一个环节,成为亟需解决的问题。同样,在人员流量大的小件物品暂存服务系统中,需要将许多人的小尺寸物品进行高效储存和提取,这同样面临如何实现高效率和高密度储存的问题。
3、传统的用于立体仓库的轨道机器人在网格化轨道上行驶时,通常需要在面向不同方向行驶时进行换向操作。现有的换向操作通常由机械结构实现,例如小型类采用丝杠(驼伏式机器人)或凸轮换向,大型类则采用气缸、电缸、液压等装置进行升降运动。然而,这些方法往往存在经济利用率较低、机械结构笨重、切换速度慢或切换不精准等问题。
4、本技术的背景技术所公开的以上信息仅用于理解本技术构思的背景,并非指示或暗示其包含了现有技术的信息。
技术实现思路
1、基于此,有必要针对上述问题,提供一种用于立体仓库的轨道机器人及智能仓储系统。
2、本技术提供一种用于立体仓库的轨道机器人,其包括:
3、箱体;
4、第一轮组,所述第一轮组设于所述箱体,所述第一轮组用于与所述立体仓库的第一轨道相配合并沿第一方向行进;
5、第二轮组,所述第二轮组设于所述箱体,所述第二轮组用于与所述立体仓库的第二轨道相配合并沿第二方向行进;
6、换向装置,所述换向装置包括换向电机、曲柄、摇杆和连杆组件,所述换向电机设于所述箱体内,所述换向电机的驱动轴穿设于所述箱体的侧板并与所述曲柄的一端固定,所述曲柄的另一端与所述摇杆的一端转动连接,所述摇杆的另一端与所述连杆组件转动连接,所述连杆组件与所述第一轮组连接并用于带动所述第一轮组作升降运动,以使所述第一轮组相对所述箱体运动至第一位置和第二位置;在所述第一位置时,所述第一轮组与所述第一轨道接触,所述第二轮组与所述第二轨道分离;在所述第二位置时,所述第一轮组与所述第一轨道分离,所述第二轮组与所述第二轨道接触。
7、上述用于立体仓库的轨道机器人至少可以实现如下有益效果:
8、其一,高效换向:相比于传统的丝杠、凸轮换向以及气缸、电缸、液压等装置,本技术通过采用换向装置中的曲柄、摇杆和连杆组件的结构设计,在换向时具有更快的切换速度,实现了轨道机器人的高效换向操作。在换向装置的驱动下,第一轮组能够相对箱体升降至第一位置和第二位置。在第一位置时,第一轮组与立体仓库的第一轨道接触,第二轮组与立体仓库的第二轨道分离,此时第一轮组便能够带动整个轨道机器人在第一轨道上沿第一方向移动。在第二位置时,第一轮组与立体仓库的第一轨道分离,第二轮组与立体仓库的第二轨道接触,此时第二轮组便能够带动整个轨道机器人在第二轨道上沿第二方向移动。轨道机器人能够在第一方向和第二方向上灵活行进,适应不同轨道布局的需求。
9、其二,空间利用率高:相比于传统的丝杠、凸轮换向以及气缸、电缸、液压等装置,本技术通过的换向装置的结构设计更为精巧紧凑,使得轨道机器人在立体仓库中占用的空间更小,从而提高了仓库的整体空间利用率。这对于需要高密度存储的场景尤为重要,如电子商务的小件商品中转仓库和小件物品暂存服务系统。
10、其三,降低成本:利用连杆机械方式的换向装置,相较于使用昂贵且复杂的液压或电缸系统,显著降低了制造和维护成本。这使得轨道机器人在大规模部署时更加经济实惠。
11、其四,高效存取:通过高效的换向和行进操作,轨道机器人能够快速准确换向并移动至指定位置存取物品,提高了仓库的周转效率和整体运营效率。这对于需要高频率存取操作的应用场景,如电子商务中转仓库,具有显著的优势。
12、综上所述,本技术提供的用于立体仓库的轨道机器人,通过创新的换向装置设计,实现了高效换向、高空间利用率、低成本、高效存取等有益效果,能够显著提升现代仓储系统的效率和性能。
13、在其中一个实施例中,所述箱体包括底盘及环绕设置在所述底盘上的侧板,所述侧板包括相对间隔设置的第一侧板和第二侧板,所述第一轮组设置为两组,两组所述第一轮组沿所述第一方向间隔设置,每组所述第一轮组均包括第一传动杆和两个第一车轮,两个所述第一车轮分别连接于所述第一传动杆的两端,所述第一传动杆的两端分别穿设于所述第二侧板和所述第一侧板,所述曲柄、所述摇杆和所述连杆组件均设于所述第一侧板背向所述第二侧板的一侧,所述换向电机的驱动轴穿设于所述第一侧板以与所述曲柄固定,所述换向电机用于驱动所述曲柄转动以同步带动所述摇杆、所述连杆组件,两个所述第一传动杆均与所述连杆组件连接且能够所述连杆组件的带动下作升降运动。换向电机通过驱动轴带动曲柄转动,曲柄的另一端与摇杆的一端转动连接。当曲柄转动时,摇杆的另一端通过连杆组件与第一传动杆连接,从而带动第一传动杆及其两端的第一车轮做升降运动。在第一轮组处于升起状态时,第一车轮与第一轨道分离,第二轮组的车轮则与第二轨道接触,使轨道机器人沿第二方向行进;相反,在第一轮组处于下降状态时,第一车轮与第一轨道接触,第二轮组的车轮则与第二轨道分离,使轨道机器人沿第一方向行进。两个第一传动杆能够在换向装置的带动下同步升降,调整换向的效率更高,切换速度快。其中,曲柄、摇杆和连杆组件均设于第一侧板背向第二侧板的一侧,换言之,曲柄、摇杆和连杆组件均在箱体外围,在需要进行故障排查时,维修人员可以直接观察和操作这些外部组件,无需拆卸箱体的内部结构,大大缩短了故障诊断和维修的时间。
14、在其中一个实施例中,所述连杆组件包括联动杆、第一摆杆和第二摆杆,所述第一摆杆和所述第二摆杆平行且沿所述第一方向间隔设置;
15、所述第一摆杆的一端设有第一限位孔和第一转轴,所述第一摆杆的一端通过所述第一转轴与所述第一侧板转动连接,所述第一摆杆的一端通过所述第一限位孔可转动地套设于一个所述第一传动杆的外侧周面,所述第一摆杆的另一端与所述联动杆的一端转动连接;
16、所述第二摆杆的一端设有第二限位孔和第二转轴,所述第二摆杆的一端通过所述第二转轴与所述第一侧板转动连接,所述第二摆杆的一端通过所述第二限位孔可转动地套设于另一个所述第一传动杆的外侧周面,所述第二摆杆的另一端与所述联动杆的另一端转动连接;
17、所述摇杆远离所述曲柄的一端转动连接于所述联动杆的中部,所述联动杆能够在所述摇杆的带动下同步所述第一摆杆和所述第二摆杆分别绕第一转轴和第二转轴转动,所述第一摆杆绕所述第一转轴转动时能够带动一个所述第一传动杆升降,所述第二摆杆绕所述第二转轴转动时能够带动另一个所述第一传动杆升降。摇杆的一端与曲柄连接,另一端与联动杆的中部转动连接。
18、当曲柄转动时,带动摇杆运动,联动杆在摇杆的带动下运动,能够同步第一摆杆和第二摆杆分别绕第一转轴和第二转轴转动。第一摆杆绕第一转轴转动时,通过第一限位孔带动一个第一传动杆升降,从而使第一车轮相应地升降。第二摆杆绕第二转轴转动时,通过第二限位孔带动另一个第一传动杆升降,从而使另一个第一车轮相应地升降。换言之,当换向电机驱动曲柄转动时,曲柄通过摇杆带动联动杆运动,联动杆同步带动第一摆杆和第二摆杆绕各自的转轴转动,第一摆杆和第二摆杆的转动带动各自的第一传动杆升降,从而实现第一车轮的升降运动,在第一车轮升起时,轨道机器人能够沿第二方向行进;在第一车轮下降时,轨道机器人能够沿第一方向行进。通过联动杆的设计,实现了第一摆杆和第二摆杆的同步升降运动,确保了第一轮组在换向过程中的稳定性和可靠性。本实施例进一步细化了连杆组件的设计,不仅实现了轨道机器人的高效换向操作,还在结构紧凑性、维护便捷性和成本控制方面取得了显著的改进,进一步提升了现代仓储系统的效率和性能。
19、在其中一个实施例中,所述联动杆位于所述第一车轮上方,所述曲柄位于所述联动杆下方,所述驱动轴的端部设有限位凸起,所述限位凸起位于所述曲柄背向所述箱体的一侧,所述摇杆远离所述连杆的一端的侧边缘开设有限位凹槽;在所述第一位置时,所述摇杆的一端绕过所述限位凸起且位于所述限位凸起远离所述联动杆的一侧,所述曲柄与所述摇杆重叠,且所述限位凸起被扣嵌于所述限位凹槽内;在所述第二位置时,所述限位凸起位于所述限位凹槽外,所述摇杆位于所述曲柄和所述联动杆之间。在第一位置时,限位凸起被扣嵌于限位凹槽内,确保了摇杆和曲柄的相对位置固定,避免了换向过程中或换向后第一轮组已与第一轨道接触时,摇杆和曲柄因震动或外力导致的位置偏移,提高了换向操作的稳定性和可靠性。并且,由于限位凸起位于曲柄背向箱体的一侧,使得维修人员在进行维护时更容易接触到关键部件,维修人员在进行故障排查时可以快速确定问题部位,简化了维护操作,缩短了维修时间,有利于提高维护效率。此外,限位凸起和限位凹槽的设计也相当于明确限定了将第一轮组运动至第一位置的换向操作的行程终点,确保了每次换向操作的精准性。
20、在其中一个实施例中,所述换向装置还包括限位块,所述限位块设于所述第一侧板,所述限位块设于两个所述第一车轮之间且位于所述摇杆下方,在所述第一位置时,所述摇杆与所述限位块抵接,在所述第二位置时,所述曲柄与所述限位块抵接。通过限位块在第一位置和第二位置对摇杆和曲柄分别提供稳定的限位效果,避免了换向操作后曲柄、摇杆、连杆组件及与连杆组件连接的第一轮组因外力或震动导致的位置偏移,限位块提供了额外的稳定支撑,可确保在换向操作后各个结构部件的位置稳定。此外,限位块在不同位置与摇杆或曲柄抵接,还确保了每次换向操作的起始和终止位置的精准性,换言之,限位块事实上还起到了定位效果。因此换向电机可以带动曲柄快速摆动直至被限位块所限位,而无需担心曲柄摆动速度过快而出现摆动过头的情况,在进一步提高了换向效率的情况下,依旧具有极高的换向精准性。
21、在其中一个实施例中,所述限位块具有朝向所述摇杆的限位斜面和朝向所述联动杆的限位顶面,在所述第一位置时,所述摇杆与所述限位斜面抵接,所述联动杆与所述限位顶面抵接,在所述第二位置时,所述曲柄和所述摇杆共线且均与所述限位斜面抵接。在第一位置时,摇杆与限位斜面抵接,联动杆与限位顶面抵接,提供了多点支撑;在第二位置时,曲柄和摇杆共线且均与限位斜面抵接,确保了换向操作的终止位置稳定。限位块的限位斜面和限位顶面分别在不同位置与摇杆、联动杆或曲柄抵接,提供了多重限位支持,增强了换向操作的稳定性。
22、在其中一个实施例中,所述箱体还包括第一支撑板,所述第一支撑板固定于所述底盘且位于所述第一侧板朝向所述第二侧板的一侧,所述曲柄、所述摇杆和所述连杆组件均设于所述第一支撑板背向所述第一侧板的一侧,所述换向电机的驱动轴穿设于所述第一侧板和所述第一支撑板以与所述曲柄固定,所述第一支撑板上开设有两个限位滑槽,每个所述第一传动杆的一端均穿设于一个所述限位滑槽以与一个所述第一车轮连接,所述第一传动杆作升降运动时能够在所述限位滑槽内滑动。第一支撑板固定于底盘,提供了稳定的支撑效果,第一支撑板的限位滑槽在第一传动杆升降运动时提供了稳定的导向,确保了第一传动杆在升降运动时的稳定性和准确性,避免了因外力或震动导致的运动偏移。
23、在其中一个实施例中,所述箱体还包括第二支撑板,所述第二支撑板设于所述第二侧板背向所述第一侧板的一侧,每个所述第一传动杆的另一端均穿设于所述第二侧板和所述第二支撑板以与一个所述第一车轮连接,每个所述第一轮组还包括悬挂件和固定板,所述固定板固定于所述第二侧板且所述固定板上设有支撑轴,所述支撑轴与所述悬挂件的一端转动连接,所述悬挂件的另一端可转动地套设于所述第一传动杆靠近所述第二侧板的一端的外侧周面,所述第一传动杆作升降运动时能够带动所述第二支撑板同步升降,并带动所述悬挂件绕所述支撑轴转动。由于悬挂件可转动地套设在第一传动杆远离第一侧板的一端的外侧周面上,当第一传动杆升降时,较为靠近第二侧板的悬挂件也会在第一传动杆的带动下绕支撑轴转动,因为悬挂件是通过支撑轴与固定的固定板相互限位的,且悬挂件是可转动地套设在第一传动杆上的,所以悬挂件可以对第一传动杆远离第一侧板的一端有承托效果,使第一传动杆的升降运动更为平稳,也使得第一传动杆的整体结构更为稳定。
24、在其中一个实施例中,所述换向装置还能够驱动所述第一轮组相对所述箱体运动至第三位置,在所述第三位置时,所述第一轮组与所述第一轨道接触,所述第二轮组与所述第二轨道接触,以限制所述轨道机器人的运动。在所述第三位置时,第一轮组和第二轮组恰好分别与第一轨道和第二轨道接触,从而限制了轨道机器人的运动。
25、在其中一个实施例中,所述轨道机器人还包括与所述箱体连接的吊运装置,所述吊运装置用于吊运料箱以在所述立体仓库的存储井道内实现所述料箱的取放。
26、在其中一个实施例中,所述第一方向和所述第二方向相互垂直。
27、在其中一个实施例中,所述轨道机器人还包括第一驱动组件,所述第一驱动组件用于驱动所述第一轮组转动。
28、在其中一个实施例中,所述轨道机器人还包括第二驱动组件,所述第二驱动组件用于驱动所述第二轮组转动。
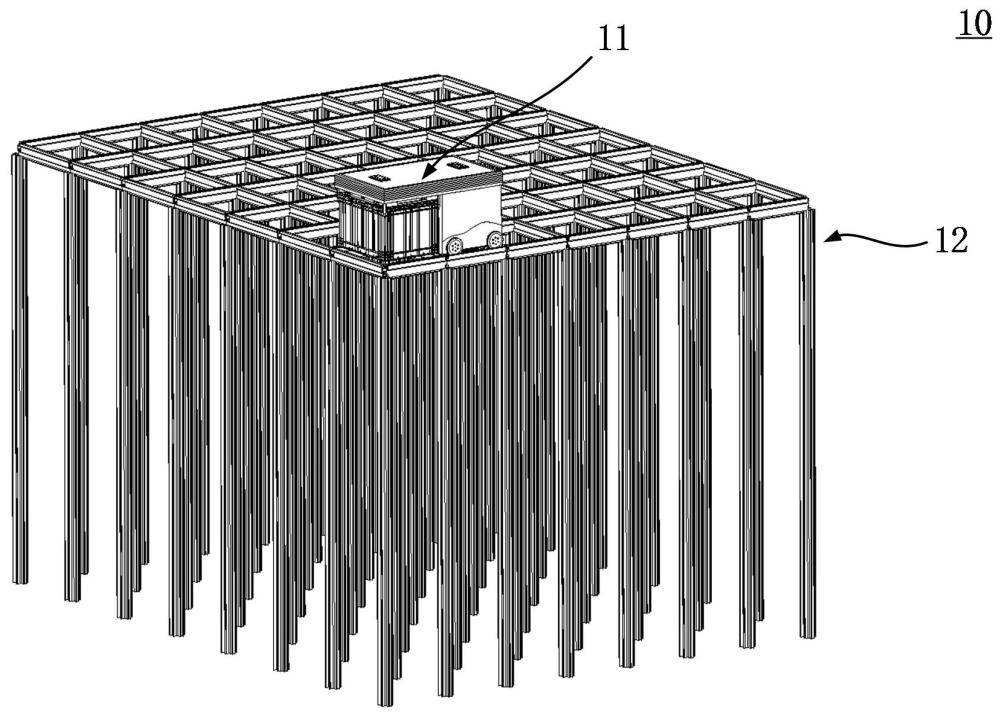
29、本技术还提供一种智能仓储系统,其包括立体仓库及如上述任一实施例所述的轨道机器人。
30、上述智能仓储系统,因其包括上述任一实施例所述的轨道机器人,故所述智能仓储系统亦至少包括如下有益效果:
31、其一,高效换向:相比于传统的丝杠、凸轮换向以及气缸、电缸、液压等装置,本技术通过采用换向装置中的曲柄、摇杆和连杆组件的结构设计,在换向时具有更快的切换速度,实现了轨道机器人的高效换向操作。在换向装置的驱动下,第一轮组能够相对箱体升降至第一位置和第二位置。在第一位置时,第一轮组与立体仓库的第一轨道接触,第二轮组与立体仓库的第二轨道分离,此时第一轮组便能够带动整个轨道机器人在第一轨道上沿第一方向移动。在第二位置时,第一轮组与立体仓库的第一轨道分离,第二轮组与立体仓库的第二轨道接触,此时第二轮组便能够带动整个轨道机器人在第二轨道上沿第二方向移动。轨道机器人能够在第一方向和第二方向上灵活行进,适应不同轨道布局的需求。
32、其二,空间利用率高:相比于传统的丝杠、凸轮换向以及气缸、电缸、液压等装置,本技术通过的换向装置的结构设计更为精巧紧凑,使得轨道机器人在立体仓库中占用的空间更小,从而提高了仓库的整体空间利用率。这对于需要高密度存储的场景尤为重要,如电子商务的小件商品中转仓库和小件物品暂存服务系统。
33、其三,降低成本:利用连杆机械方式的换向装置,相较于使用昂贵且复杂的液压或电缸系统,显著降低了制造和维护成本。这使得轨道机器人在大规模部署时更加经济实惠。
34、其四,高效存取:通过高效的换向和行进操作,轨道机器人能够快速准确换向并移动至指定位置存取物品,提高了仓库的周转效率和整体运营效率。这对于需要高频率存取操作的应用场景,如电子商务中转仓库,具有显著的优势。
35、综上所述,本技术提供的智能仓储系统,其用于立体仓库的轨道机器人通过创新的换向装置设计,实现了高效换向、高空间利用率、低成本、高效存取等有益效果,能够显著提升现代仓储系统的效率和性能。
本文地址:https://www.jishuxx.com/zhuanli/20240919/300394.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表