一种土壤快速采样机器人及土壤采样方法与流程
- 国知局
- 2024-08-30 14:57:01
本发明涉及一种土壤快速采样机器人及土壤采样方法,属于土壤采集。
背景技术:
1、土壤是人类赖以生存的重要自然资源,事关粮食安全、生态安全。土壤是人类农业生产基地,在植物生长繁育过程中,土壤能够将养分转化和循环。土壤对有机、无机污染物具有过滤、缓冲、降解、固定和解毒作用。
技术实现思路
1、针对上述技术问题,本发明提供一种土壤快速采样机器人及土壤采样方法,以解决现有的土壤采样装置不能多面积多点取样,取样、定位、收集和封装不能一体化完成及取样效率低下的问题。
2、为实现上述目的,本发明采取以下技术方案:
3、一种土壤快速采样机器人,包括:
4、机架以及安装在所述机架上的车轮和卫星定位器;
5、土壤采样装置,安装于所述机架上,包括第一驱动机构以及与所述第一驱动机构传动连接的机械臂,所述机械臂的末端安装有液压土钻;
6、土壤收集装置,安装于所述机架上,包括装土漏斗以及位于所述装土漏斗末端的土壤收集器和样品袋;
7、主控制器和移动控制终端,二者通信连接,所述主控制器安装在所述机架上,所述卫星定位器通过线路与所述主控制器电连接;
8、第二驱动机构,安装于所述机架上,用于驱动所述车轮运动。
9、所述的土壤快速采样机器人,优选地,所述第一驱动机构通过回转支承平台和腰部转台与所述机械臂连接,所述回转支承平台包括底座以及设置于所述底座上的蜗轮蜗杆传动组件,所述蜗轮蜗杆传动组件分别与所述第一驱动机构、所述腰部转台传动连接,所述腰部转台与所述机械臂连接。
10、所述的土壤快速采样机器人,优选地,所述机械臂包括大臂和小臂,所述大臂的一端与所述腰部转台连接,另一端通过三角架与所述小臂连接。
11、所述的土壤快速采样机器人,优选地,所述小臂通过水平座与所述液压土钻连接。
12、所述的土壤快速采样机器人,优选地,所述液压土钻包括液压缸和取土钻头,所述液压缸用于驱动所述钻头下钻土壤并取土。
13、所述的土壤快速采样机器人,优选地,所述机架的下方设置有可移动刮草底板,所述刮草底板在所述液压缸的驱动下向远离或靠近所述车轮的方向移动。
14、所述的土壤快速采样机器人,优选地,所述土壤收集装置还包括打码器,所述打码器通过线路与所述主控制器电连接。
15、所述的土壤快速采样机器人,优选地,所述土壤收集装置还包括土壤样品存放机,采集的土壤样品被所述打码器打码后,通过传送带运输到所述土壤样品存放机。
16、所述的土壤快速采样机器人,优选地,位于行进方向前端的所述车轮外侧还安装有摇臂履带轮,所述摇臂履带轮根据不同地形调整行走姿势。
17、本发明第二方面提供一种上述土壤快速采样机器人的土壤采样方法,包括如下步骤:
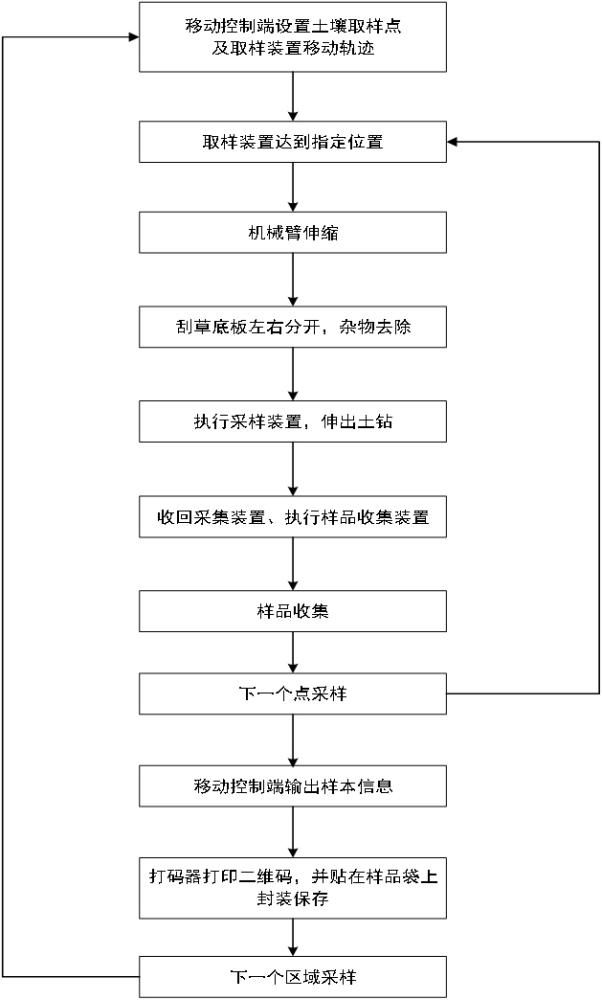
18、首先获取整个地块的边缘代表点的经纬度,将获取的经纬度信息录入所述移动控制终端,根据采样需求,设置所述土壤采样装置的行走路线、采土深度,通过操控所述移动控制终端,将所述土壤采集装置移动到指定位置,启动所述液压缸,所述刮草底板向两侧移动,将土层表面包括杂草在内的各种杂质去除,所述液压土钻的钻头深入指定土壤深度进行取样,指定点取样结束,所述机械臂掉头深入所述装土漏斗,所述装土漏斗内的土壤掉落至所述样品袋,第一个目标点位取样结束,进行下一个点取样;
19、所有点位取样结束后,所述移动控制终端输出样品信息,所述打码器生成的二维码贴在所述样品袋上,该区域取样结束,所述样品袋通过传送带运输到所述土壤样品存放机,之后进行下个区域的取样。
20、本发明由于采取以上技术方案,其具有以下优点:
21、1、本发明采用轮式与履带式相结合的行走方式,在平整的耕地采用轮式行走,能够提高作业效率,在高低不平的耕地采用履带式结构的摇臂履带轮,该仿生结构能够辅佐机器人行走,避免翻车。因此,该结构能够适应土壤结构更广泛,不容易发生侧翻。
22、2、本发明采用移动控制终端和主控制器相结合的控制方式,移动控制终端可以实现对大规模农田的宏观把控,取样前提前设置移动轨迹。主控制器实现对各个控制单元的操控,执行各项任务。
23、3、本发明将土壤采样、定位、取样收集和封装为一体的机器人,尺寸较小,适用性较强,成本较低。
24、4、本发明的机器人提高大规模农场、万亩方、千亩方等耕地多点取样的工作效率。
技术特征:1.一种土壤快速采样机器人,其特征在于,包括:
2.根据权利要求1所述的土壤快速采样机器人,其特征在于,所述第一驱动机构通过回转支承平台和腰部转台(2)与所述机械臂连接,所述回转支承平台包括底座以及设置于所述底座上的蜗轮蜗杆传动组件,所述蜗轮蜗杆传动组件分别与所述第一驱动机构、所述腰部转台(2)传动连接,所述腰部转台(2)与所述机械臂连接。
3.根据权利要求2所述的土壤快速采样机器人,其特征在于,所述机械臂包括大臂(9)和小臂(11),所述大臂(9)的一端与所述腰部转台(2)连接,另一端通过三角架(10)与所述小臂(11)连接。
4.根据权利要求3所述的土壤快速采样机器人,其特征在于,所述小臂(11)通过水平座(12)与所述液压土钻(13)连接。
5.根据权利要求4所述的土壤快速采样机器人,其特征在于,所述液压土钻(13)包括液压缸和取土的钻头(17),所述液压缸用于驱动所述钻头(17)下钻土壤并取土。
6.根据权利要求5所述的土壤快速采样机器人,其特征在于,所述机架的下方设置有可移动刮草底板(4),所述刮草底板(4)在所述液压缸的驱动下向远离或靠近所述车轮的方向移动。
7.根据权利要求6所述的土壤快速采样机器人,其特征在于,所述土壤收集装置还包括打码器(5),所述打码器(5)通过线路与所述主控制器(14)电连接。
8.根据权利要求7所述的土壤快速采样机器人,其特征在于,所述土壤收集装置还包括土壤样品存放机(6),采集的土壤样品被所述打码器(5)打码后,通过传送带运输到所述土壤样品存放机(6)。
9.根据权利要求8所述的土壤快速采样机器人,其特征在于,位于行进方向前端的所述车轮外侧还安装有摇臂履带轮(1),所述摇臂履带轮(1)根据不同地形调整行走姿势。
10.一种根据权利要求9所述土壤快速采样机器人的土壤采样方法,其特征在于,包括如下步骤:
技术总结本发明涉及一种土壤快速采样机器人及土壤采样方法,机器人包括:机架以及安装在所述机架上的车轮和卫星定位器;土壤采样装置,安装于所述机架上,包括第一驱动机构以及与所述第一驱动机构传动连接的机械臂,所述机械臂的末端安装有液压土钻;土壤收集装置,安装于所述机架上,包括装土漏斗以及位于所述装土漏斗末端的土壤收集器和样品袋;主控制器和移动控制终端,二者通信连接,所述主控制器安装在所述机架上,所述卫星定位器通过线路与所述主控制器电连接;第二驱动机构,安装于所述机架上,用于驱动所述车轮运动。技术研发人员:沈秀丽,魏冉冉,黄光群,孟海波,温冯睿,张文静受保护的技术使用者:农业农村部规划设计研究院技术研发日:技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/284733.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表