基于事件相机的空箱检测方法与流程
- 国知局
- 2024-08-30 14:55:41
本发明涉及空箱检测,尤其涉及一种基于事件相机的空箱检测方法。
背景技术:
1、现有技术的集装箱空箱检测方法主要分为有接触式锤击激励法和无接触式气介激励法,有接触式锤击激励法通过激励仪在箱外激励集装箱体的底梁,使集装箱体振动产生声波,通过声波采集传感器采集箱体内部产生的声波,对声波进行处理和分析后得到集装箱内部声场模态,与预设的空箱声场进行对比,若相同则预测为空箱,反之则预测为非空箱;无接触式气介激励法通过对集装箱上的指定位置采用气介激励信号进行无接触激励,同样使集装箱体振动产生声波,采用激光传感器采集集装箱上激励位置的箱体复合振动响应信号,最后智能识别集装箱的状态是否为空箱。
2、现有技术的有接触式锤击激励法存在如下问题,需要接触集装箱侧面,并找到集装箱侧面底部的横梁,才能使激励仪对集装箱产生有效的激励,位置不准会导致检测效果下降,同时检测过程中车辆的移动会损坏检测设备,影响设备的使用寿命和检测良率;无接触式气介激励法存在如下问题,需要激励设备每次检测时产生同等规模的信号,但不同厂家和批次生产的激励设备或多或少会有所差别,导致激励信号会受激励设备的影响,另外激励信号通过空气传播,会受到周围环境噪声的影响,导致检测结果存在偏差。此外,现有技术均通过激光传感器采集集装箱侧面某个点的震动信号,对集装箱内部物体摆放的位置要求较高,如果物体摆放的位置距离具体信号采集点较远,则会导致识别效果大幅下降,检测结果的偏差较大。并且,采集侧面水平方向的震动信号,去分析集装箱内部是否有物体时,此类信号对体积较小、结构镂空、重量较重的物体均不敏感,导致检测困难。
技术实现思路
1、本发明的一个目的在于提供一种基于事件相机的空箱检测方法,能够将信号采集覆盖到箱体的整体侧面,减少了箱体内部物体摆放位置对检测良率的影响,提升了箱体内部体积较小、结构镂空、重量较重的物体判断的准确率,同时事件相机采集信号允许较远距离检测,对现场工作环境友好,且不影响设备的使用寿命和检测良率,此外采用snn算法,对算力要求较低,可以满足低功耗的需求。
2、本发明的其它优势和特点通过下述的详细说明得以充分体现并可通过所附权利要求中特地指出的手段和装置的组合得以实现。
3、依本发明的一个方面,能够实现前述目的和其他目的和优势的本发明的一种基于事件相机的空箱检测方法,包括以下步骤:
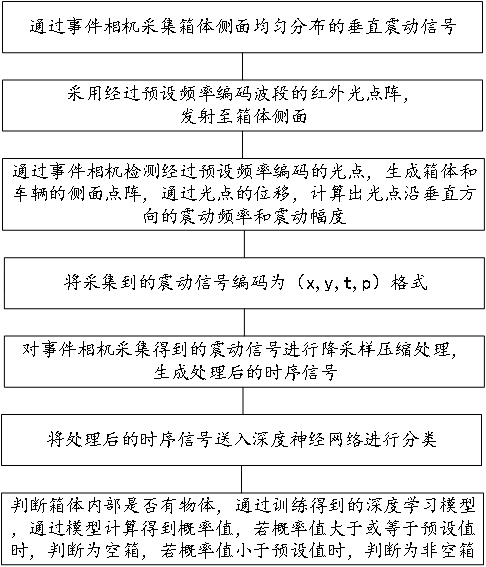
4、(a)通过事件相机采集箱体侧面均匀分布的垂直震动信号;
5、(b)采用经过预设频率编码波段的红外光点阵,发射至箱体侧面;
6、(c)通过事件相机检测经过预设频率编码的光点,生成箱体和车辆的侧面点阵,通过光点的位移,计算出光点沿垂直方向的震动频率和震动幅度;
7、(d)将采集到的震动信号编码为(x,y,t,p)格式;
8、(e)对事件相机采集得到的震动信号进行降采样压缩处理,生成处理后的时序信号;
9、(f)将处理后的时序信号送入深度神经网络进行分类;
10、(g)判断箱体内部是否有物体,通过训练得到的深度学习模型,通过模型计算得到概率值,若概率值大于或等于预设值时,判断为空箱,若概率值小于预设值时,判断为非空箱。
11、根据本发明的一个实施例,进一步包括步骤(h)通过多次判断的结果做投票,投票规则为重复步骤(a)~(g)多次,重复次数为奇数次,从而得到奇数个数的概率值,计算出概率值的平均值,若平均值大于或等于预设值时,判断为空箱,若平均值小于预设值时,判断为非空箱。
12、根据本发明的一个实施例,所述步骤(a)包括子步骤(a1)事件相机采用940nm波段的滤光片。
13、根据本发明的一个实施例,所述步骤(b)包括子步骤(b1)每个/行/列光源的光点均可设置一个闪烁的固定频率。
14、根据本发明的一个实施例,所述步骤(c)包括子步骤(c1)统计1秒内,光点闪烁的次数n,震动频率h = 1 / n,震动幅度为光点在事件相机的图像的y轴坐标。
15、根据本发明的一个实施例,所述步骤(d)包括子步骤(d1)x、y分别为光点所在的行数和列数,t为具体的时间,p为光点在事件相机的画面中的y轴的坐标值。
16、根据本发明的一个实施例,所述步骤(e)包括子步骤(e1)根据采集到震动信号的垂直移动幅值p值,求出均值e和标准差a,其中,其中,,i为(1,2,3...n)的任一,n为沿时间维度t累计数据的区间大小。
17、根据本发明的一个实施例,所述步骤(e)包括子步骤(e2)垂直移动幅值平均值b =a / n,对p值进行个数为n的累加成{0,q1,q2,q3,q4......},利用相邻两个q值的差值m,m值与b值进行比对,m值大于等于b记为1,m值小于b记为0,生成处理后的时序信号v。
18、根据本发明的一个实施例,所述步骤(g)包括子步骤(g1)得到的概率值z介于[0,1]区间内,阈值设为0.5,当概率值z大于或等于0.5时判断为空箱,概率值z小于0.5时判断为非空箱。
19、根据本发明的一个实施例,所述步骤(h)包括子步骤(h1)将步骤(a)~(g)重复5次,得到5个概率值[z1,z2,z3,z4,z5],再计算出概率的平均值,其中,i为(1,2,3,4,5)的任一,根据阈值0.5,大于等于0.5则为空箱,小于0.5则为非空箱。
20、本发明的有益效果是:本发明能够将信号采集覆盖到箱体的整体侧面,减少了箱体内部物体摆放位置的影响,提升了箱体内部体积较小、结构镂空、重量较重的物体判断的准确率,同时事件相机采集信号允许较远距离,对现场工作环境友好,此外采用snn算法,对算力要求较低,可以满足低功耗的需求。
技术特征:1.一种基于事件相机的空箱检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的空箱检测方法,其特征在于,进一步包括步骤(h)通过多次判断的结果做投票,投票规则为重复步骤(a)~(g)多次,重复次数为奇数次,从而得到奇数个数的概率值,计算出概率值的平均值,若平均值大于或等于预设值时,判断为空箱,若平均值小于预设值时,判断为非空箱。
3.根据权利要求2所述的空箱检测方法,其特征在于,所述步骤(a)包括子步骤(a1)事件相机采用940nm波段的滤光片。
4.根据权利要求3所述的空箱检测方法,其特征在于,所述步骤(b)包括子步骤(b1)每个/行/列光源的光点均可设置一个闪烁的固定频率。
5.根据权利要求4所述的空箱检测方法,其特征在于,所述步骤(c)包括子步骤(c1)统计1秒内,光点闪烁的次数n,震动频率h = 1 / n,震动幅度为光点在事件相机的图像的y轴坐标。
6.根据权利要求5所述的空箱检测方法,其特征在于,所述步骤(d)包括子步骤(d1)x、y分别为光点所在的行数和列数,t为具体的时间,p为光点在事件相机的画面中的y轴的坐标值。
7.根据权利要求6所述的空箱检测方法,其特征在于,所述步骤(e)包括子步骤(e1)根据采集到震动信号的垂直移动幅值p值,求出均值e和标准差a,其中,其中,,i为(1,2,3...n)的任一,n为沿时间维度t累计数据的区间大小。
8.根据权利要求7所述的空箱检测方法,其特征在于,所述步骤(e)包括子步骤(e2)垂直移动幅值平均值b = a / n,对p值进行个数为n的累加成{0,q1,q2,q3,q4......},利用相邻两个q值的差值m,m值与b值进行比对,m值大于等于b记为1,m值小于b记为0,生成处理后的时序信号v。
9.根据权利要求8所述的空箱检测方法,其特征在于,所述步骤(g)包括子步骤(g1)得到的概率值z介于[0,1]区间内,阈值设为0.5,当概率值z大于或等于0.5时判断为空箱,概率值z小于0.5时判断为非空箱。
10.根据权利要求2所述的空箱检测方法,其特征在于,所述步骤(h)包括子步骤(h1)将步骤(a)~(g)重复5次,得到5个概率值[z1,z2,z3,z4,z5],再计算出概率的平均值,其中,i为(1,2,3,4,5)的任一,根据阈值0.5,大于等于0.5则为空箱,小于0.5则为非空箱。
技术总结本发明公开了一种基于事件相机的空箱检测方法,包括:(A)通过事件相机采集箱体侧面均匀分布的垂直震动信号;(B)采用经过预设频率编码波段的红外光点阵,发射至箱体侧面;(C)通过事件相机检测经过预设频率编码的光点,生成箱体和车辆的侧面点阵,通过光点的位移,计算出光点沿垂直方向的震动频率和震动幅度;(D)将采集到的震动信号编码为(x,y,t,p)格式;(E)对事件相机采集得到的震动信号进行降采样压缩处理,生成处理后的时序信号;(F)将处理后的时序信号送入深度神经网络进行分类;(G)判断箱体内部是否有物体,通过模型计算得到概率值,若概率值大于或等于预设值时,判断为空箱,若概率值小于预设值时,判断为非空箱。技术研发人员:赖时伍,夏炉系,赵娜,张浒,苗应亮受保护的技术使用者:盛视科技股份有限公司技术研发日:技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/284587.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表