一种基于抓力跟踪和路径可视化的智能监测驾驶系统的制作方法
- 国知局
- 2024-08-30 14:52:23
本发明属于驾驶监测预警,具体涉及一种基于抓力跟踪和路径可视化的智能监测驾驶系统。
背景技术:
1、造成交通事故频发的一个最为重要的因素就是夜间长距离的疲劳驾驶,但是由于疲劳驾驶的成因复杂多样,监测技术尚未成熟,目前疲劳驾驶检测受限于环境、科技等各种因素的影响。
2、在汽车行驶过程中,通过一系列的传感器、相机、雷达和导航定位等技术,可以实时地监测汽车周围的道路状况、交通情况以及驾驶员的行为,并根据所收集到的数据,进行分析和判断,及时发出预警信息,有利于帮助驾驶员规避潜在的事故风险。
3、现有的对驾驶室人员的疲劳驾驶检测技术,基本均为对驾驶员的人脸信息进行识别判断的技术。通过采集驾驶员的人脸信息,通过判断驾驶员的眨眼频率或者打哈欠等行为来判断驾驶员是否处于疲劳驾驶状态,但是驾驶员出现疲劳驾驶的情况大部分是发生在夜间行驶,驾驶员在夜晚驾驶时,汽车内一般处于昏暗状态,在光线微弱的情况下,对于驾驶员的人脸采集会产生较大的误差。即在夜间情况下,图像采集系统很难识别驾驶员的实际状态,这一情况会使得识别系统对驾驶员疲劳驾驶的判断准确性大幅下降。
4、为此,本申请提供一种基于抓力跟踪和路径可视化的智能监测驾驶系统,在夜间长距离行驶的情况下也能够快速及时地判断出司机注意力是否集中,并且可以进一步判断出车辆下一步的行驶路线与道路边沿距离是否过近,用以提示是否存在不安全的驾驶情况。
5、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本发明的目的是在于提供一种基于抓力跟踪和路径可视化的智能监测驾驶系统,以解决在夜间长距离行驶时,在光线微弱的情况下难以快速及时地判断出司机注意力是否集中的问题,并且进一步判断出车辆下一步的行驶路线与道路边沿距离是否过近。
2、为了实现上述目的,本发明提供了如下技术方案:
3、一种基于抓力跟踪和路径可视化的智能监测驾驶系统,包括:
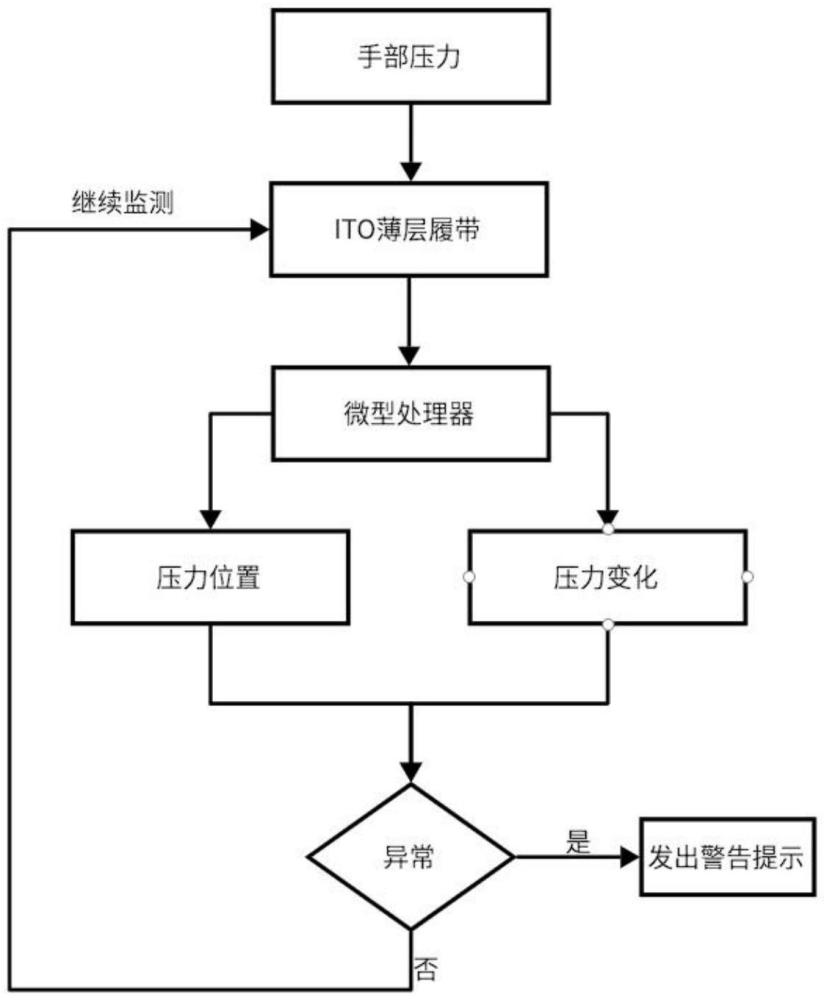
4、压力感应模块,由ito薄层履带和微型处理器组成;所述ito薄层履带用于接收压力使电路参数改变;所述微型处理器通过电路参数的改变来判断压力位置以及压力变化;
5、摄像头,采集路面数据并将路面信息传输给图像处理模块和图像生成模块;
6、图像处理模块,接收路面数据并计算路面边沿信息;
7、方向盘数据获取模块,包括角位移传感器、速度传感器和微积分计算模块;其中,所述角位移传感器用于获取方向盘转动角度并推算出车辆前轮转动角度;所述速度传感器用于获取车辆当前速度和加速度;所述微积分计算模块用于构建运动学模型,计算以当前速度所行驶的曲线;
8、图像生成模块,根据路面信息和所述微积分计算模块得出的行驶曲线预估车辆行驶路线数据,并生成行驶路线动画传输给显示模块;
9、显示模块,为电子显示屏,用于获取摄像头以及方向盘数据获取模块的数据,对两者数据进行分析,判断是否存在异常,并综合显示。
10、在本方案中,所述ito薄层履带均匀导电,压力位置为:
11、x=length*v1/v,
12、其中,v1表示压力位置电压;v表示电源电压。
13、正常压力大小为f,变化范围为±δf;当压力大小逐渐减小,且速度变化值超过δf时,判定为注意力不集中。
14、另外,本系统还包括计算模块,所述计算模块接收图像处理模块计算的道路边沿和车的距离以及图像生成模块预估的车辆行驶路线数据,并判断预计路线与道路边沿距离是否过小;若是,则发出提示;若否,则继续监测。
15、与现有技术相比,本发明具有如下有益效果:
16、(1)本发明的基于抓力跟踪和路径可视化的智能监测驾驶系统,通过方向盘的压力感应,可以判断出方向盘上压力点的力度位置和力度变化,当方向盘发生偏转时对压力变化进行判断,压力减小或者突然增大,可设置临界值判断司机注意力是否集中。
17、(2)本发明的基于抓力跟踪和路径可视化的智能监测驾驶系统,通过获取车辆当前的偏转角度,行驶速度,可以计算得到预计的汽车行驶路线;图像处理模块根据摄像头的数据信息,可以计算出道路边沿和车的距离;计算模块对以上两个计算结果进行分析,可以进一步判断出车辆下一步的行驶路线是否存在与道路边沿距离过近的情况。
技术特征:1.一种基于抓力跟踪和路径可视化的智能监测驾驶系统,其特征在于,包括:
2.根据权利要求1所述的基于抓力跟踪和路径可视化的智能监测驾驶系统,其特征在于,所述ito薄层履带均匀导电,压力位置为:
3.根据权利要求1所述的基于抓力跟踪和路径可视化的智能监测驾驶系统,其特征在于,正常压力大小为f,变化范围为±δf;当压力大小逐渐减小,且速度变化值超过δf时,判定为注意力不集中。
4.根据权利要求1所述的基于抓力跟踪和路径可视化的智能监测驾驶系统,其特征在于,还包括计算模块;所述计算模块接收图像处理模块计算的道路边沿和车的距离以及图像生成模块预估的车辆行驶路线数据,并判断预计路线与道路边沿距离是否过小;若是,则发出提示;若否,则继续监测。
技术总结本发明属于驾驶监测预警技术领域,具体涉及一种基于抓力跟踪和路径可视化的智能监测驾驶系统,包括:ITO薄层履带,用于接收压力;微型处理器,判断压力位置及压力变化;摄像头,采集路面数据;图像处理模块,计算路面边沿信息;角位移传感器,用于获取方向盘转动角度并推算车辆前轮转动角度;速度传感器,用于获取车辆当前速度和加速度;微积分计算模块,计算以当前速度所行驶的曲线;图像生成模块,生成行驶路线动画传输给显示模块;显示模块,获取摄像头以及方向盘数据获取模块的数据,对两者数据进行分析,判断是否存在异常,并综合显示。本发明能够快速及时地判断出司机注意力是否集中以及车辆下一步的行驶路线与道路边沿距离是否过近。技术研发人员:贺显亮,张思维,郑洪,林云辉,杨和平,张桂兰,张启伦受保护的技术使用者:广西双英集团股份有限公司技术研发日:技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/284219.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表