一种高性能仿生青蛙跳跃机器人及控制方法
- 国知局
- 2024-08-01 08:19:27
本发明属于仿生机械的,具体公开了一种高性能仿生青蛙跳跃机器人及控制方法。
背景技术:
1、随着人类探索地球的深入,可代替人类在恶劣条件下完成相关任务的仿生机器人渐渐成为机器人研制的热点,因而研制一种活动范围广、移动能力强、越障能力卓越的仿生跳跃机器人有着重要的理论研究意义和广阔的应用前景。青蛙具有优异的水陆两栖运动能力,虽然其水下游动性能与效率稍逊于鱼类,但是青蛙独特的腿部结构与骨骼,通过肌肉收缩产生能量驱动跳跃是青蛙的最大亮点,通过模仿青蛙外形和运动特征,已提出多种仿生青蛙设计方案:
2、如cn117446043a公开了一种基于仿生设计的青蛙机器人,通过气泵、气缸组的伸缩实现机体的跳跃,但结构复杂,难以模拟青蛙跳跃中后腿弯曲和伸展过程,因此难以实现高性能、远距离的跳跃。
技术实现思路
1、本发明提供一种高性能仿生青蛙跳跃机器人,结构简单,可模拟青蛙跳跃中后腿弯曲和伸展过程,实现高性能、远距离的跳跃,并基于上述高性能仿生青蛙跳跃机器人提出一种控制方法。
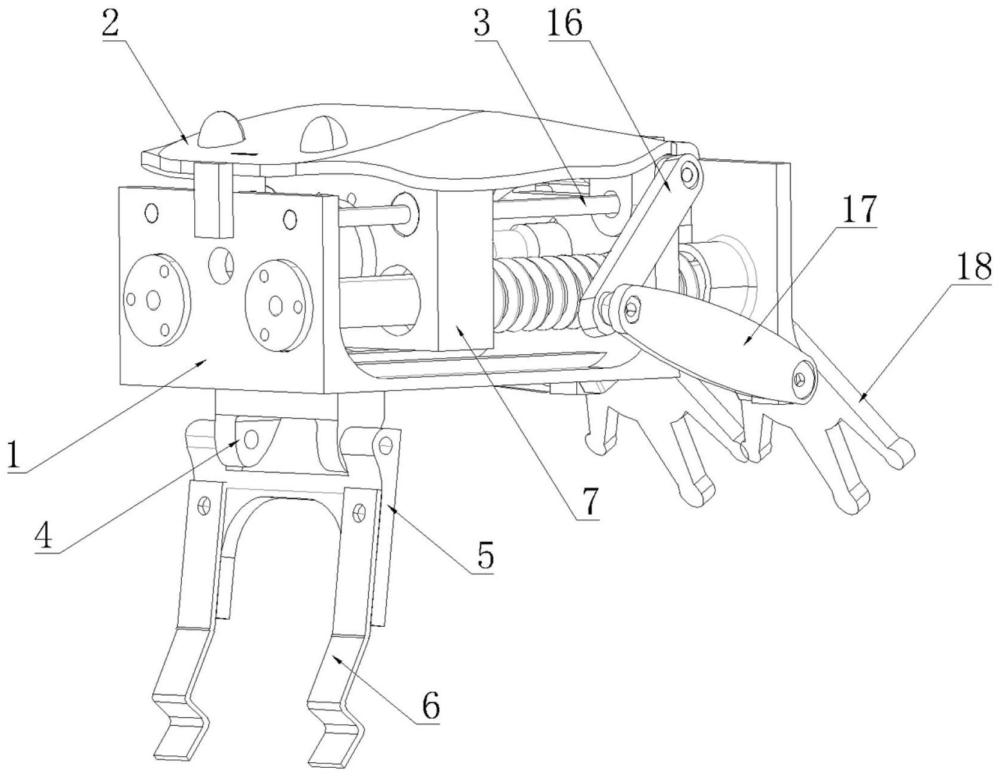
2、上述高性能仿生青蛙跳跃机器人,包括躯干、弹性元件、储能机构、释能机构和后腿机构;躯干包括躯干前挡板和躯干后挡板;储能机构包括滑块、轴ⅰ和滑块驱动组件;释能机构包括卡扣和传动板;传动板位于躯干的后方,前侧面设置有套筒;轴ⅰ穿过躯干后挡板,前端固定在躯干前挡板上,后端插设在传动板的套筒内;滑块滑动套设在轴ⅰ上,位于躯干前挡板和躯干后挡板之间,由滑块驱动组件驱动沿轴ⅰ前后移动,滑块的后侧面设置有弧形槽;弹性元件穿过躯干后挡板,两端分别与滑块和传动板连接;卡扣与躯干后挡板通过卡扣轴铰接,卡扣的前端设置有向下弯曲的弧形结构,卡扣的后端设置有卡板结构;后腿机构包括前肢、后肢和脚部;两组前肢和两组后肢分别对称设置在躯干和传动板的两侧;脚部包括脚掌以及设置在脚掌前侧面上的连接耳;前肢的上端与躯干后挡板通过旋转关节连接;前肢的下端与后肢的上端通过旋转关节连接;后肢的下端、传动板、脚部的连接耳通过旋转关节连接;卡板结构用于卡接在传动板上,使传动板处于第一位置;弧形结构用于被滑块的弧形槽下压使卡板结构向上旋转释放传动板,使传动板在弹性元件作用下向后翻转至第二位置对后腿机构施加瞬时推力。
3、上述高性能仿生青蛙跳跃机器人中,弹性元件为弹簧;弹簧套设在轴ⅰ上,穿过躯干后挡板,两端分别与滑块和传动板连接;卡板结构为直角卡板;传动板上设置有与直角卡板配合的直角限位槽;传动板的第一位置为平行于躯干后挡板的位置。
4、上述高性能仿生青蛙跳跃机器人中,滑块驱动组件包括丝杠、丝杠螺母和电机;丝杠螺母固定在滑块上;丝杠平行于轴ⅰ,穿过丝杠螺母和滑块,由电机驱动旋转。
5、上述高性能仿生青蛙跳跃机器人中,滑块驱动组件还包括联轴器;丝杆的后端与电机的输出轴通过联轴器连接;丝杆、联轴器和电机沿着躯干的中心轴线布置;电机固定在躯干后挡板上;两根轴ⅰ对称设置在丝杆的两侧。
6、上述高性能仿生青蛙跳跃机器人中,还包括外壳和轴ⅱ;外壳位于躯干的上方,前端设置有卡槽,后端设置有卡扣避让槽,下表面设设置有连接耳;躯干前挡板插设在卡槽中;两根轴ⅱ对称设置在丝杆的两侧;轴ⅱ穿过滑块、外壳的连接耳,两端与躯干前挡板和躯干后挡板连接。
7、上述高性能仿生青蛙跳跃机器人中,滑块上与轴ⅰ和轴ⅱ对应的轴孔上安装有直线轴承,轴ⅰ和轴ⅱ穿过直线轴承。
8、上述高性能仿生青蛙跳跃机器人中,外壳为仿生流线型外壳;脚掌的表面设置有防滑材料。
9、上述高性能仿生青蛙跳跃机器人,还包括前腿机构;躯干还包括连接躯干前挡板和躯干后挡板的躯干底板;前腿机构包括连接件ⅰ、连接件ⅱ和前腿;连接件ⅰ的上表面与躯干底板的下表面固定连接,下表面设置有两个连接耳;连接件ⅱ设置有两个上连接耳和两个下连接耳,两个上连接耳与连接件ⅰ的两个连接耳通过连接轴铰接,连接件ⅱ的旋转角度为前后90°;前腿为弯折的板状结构,包括依次连接的第一连接板、第二连接板、第三连接板和第四连接板,第一连接板通过固定件固定在连接件ⅱ的下连接耳上,固定件垂直于连接轴。
10、上述高性能仿生青蛙跳跃机器人还包括控制系统;控制系统包括锂电池、电机驱动板、dc-dc升压稳压模块、无线遥控器;锂电池、电机驱动板、dc-dc升压稳压模块安装在躯干中,位于滑块的下方。
11、本发明还提供一种上述高性能仿生青蛙跳跃机器人的控制方法,包括下述步骤:
12、s1,旋转连接件ⅱ和前腿,支撑躯干,调整跳跃角度,确保跳跃的稳定性和准确性;
13、s2,旋转调节前肢、后肢和脚部,使脚掌与支撑面紧贴,增加高性能仿生青蛙跳跃机器人与支撑面的接触面积,以最大限度地增加与支撑面的摩擦,提高跳跃的效率;
14、s3,控制电机匀速正转,滑块沿着丝杠由前向后进行直线运动,压缩套设在轴ⅰ上的弹簧,为高性能仿生青蛙跳跃机器人的跳跃储能;
15、s4,滑块继续向后移动,滑块的弧形槽与卡扣的弧形结构接触对弧形结构施加向下的压力,当压力达到预设阈值时,卡扣旋转,卡板结构向上旋转释放传动板,传动板在弹性元件作用下向后翻转至第二位置,对后腿机构施加瞬时推力,高性能仿生青蛙跳跃机器人按照步骤s1所设定的跳跃角度向前方跃进,至此一个完整的跳跃运动完成。
16、与现有技术相比,本发明具有以下有益效果。
17、1、本发明在蓄能阶段,卡扣和传动板连接,使传动板处于第一位置,滑块驱动组件能够滑块向后移动压缩套设在轴ⅰ上的弹簧,为跳跃储能,当滑块的弧形槽与卡扣的弧形结构接触时,二者产生交互作用,滑块的弧形槽对弧形结构施加向下的压力,当压力达到预设阈值时,卡扣旋转,卡板结构向上旋转释放传动板,实现瞬间释能,传动板在弹性元件作用下向后翻转至第二位置,对后腿机构施加瞬时推力,使后腿机构迅速伸展,对支撑面施加强大的推动力,实现高性能、远距离的跳跃。
18、2、卡板结构的设计为卡扣提供了稳定卡紧力,确保在静止状态下卡扣能够精确地保持在预设位置,有效防止了晃动或移位等不稳定现象的发生,不仅增强了卡扣的稳定性,也提升了整个装置的可靠性;弧形结构的设计充分考虑了滑块的运动特性,允许在滑块移动至特定距离后,通过弧形结构作用于卡板结构实现其旋转,使得卡扣能够根据躯干内滑块的运动状态进行灵活响应,实现了从静态到动态的稳定转换,提高了装置的响应速度和灵活性;滑块对卡扣的推力经过精心设计,转化为对卡板结构的竖直向上的拉力,不仅转化高效,而且能够充分利用滑块的作用力,确保卡板结构能够顺利地从传动板上分离,为后腿机构的释放提供了有力的支持;整个卡扣设计结构紧凑,运动过程流畅,减少了不必要的摩擦和能量损失,从而提高了装置的机械效率。
19、3、躯干后挡板、前肢、后肢、脚部、传动板通过旋转关节连接,允许在跳跃时进行大幅度的弯曲和伸展;宽大的脚掌设计,增加与地面的接触面积,提供更好的稳定性;脚掌的表面覆盖有防滑材料,确保在跳跃过程中能够牢固地抓住支撑面,防止滑脱。
20、4、丝杆滑块储能机构的设计允许对弹簧的压缩程度进行精确控制;通过调整丝杆的旋转角度或圈数,可以精确地设定弹簧的压缩量,从而控制跳跃的高度和力度;丝杆的运动是平稳且连续的,可实现弹簧的平稳压缩,平稳压缩有助于减少机械应力和磨损,延长装置的使用寿命;丝杆能够承受较大的压力和负载,可以有效地传递力量以压缩弹簧,使装置能够承受更高的跳跃需求,而不会因为动力不足而影响性能;丝杆可以方便地实现正向和反向旋转,弹簧的压缩和释放过程都可以通过丝杆的旋转进行控制,这种可逆性使得装置能够灵活地适应不同的操作需求,如连续跳跃或间歇跳跃;同时,丝杆的维护也相对简单,可以通过定期清洁和润滑来保持其良好的工作状态;丝杆作为动力源在压缩弹簧以提供弹力跳跃的装置中具有精确控制、平稳操作、高负载能力、可逆操作以及易于集成和维护等优势。
21、5、轴采用轻质坚固材料制成,结构稳定且轻盈,提高跳跃的灵活性;采用双轴支撑的躯干和外壳,提高装置的稳定性,增强其承受高负荷的能力;仿照青蛙设计的外壳,继承青蛙皮肤自然流畅的线条美,更在轻盈的材质上赋予了现代审美观念,使其既轻便又充满艺术感。
22、6、前腿与躯干可分离式设计以及铰链连接,能够实现前后90°的角度调整,在不同的支撑面条件和跳跃需求下灵活应对,确保跳跃的稳定性和准确性,提高对不同环境的适应性,使其在实际应用中更加便捷和高效;前腿机构的模块化设计简化组装和拆卸过程,易于维护和更换部件。
23、7、本发明设计结构紧凑,与真实青蛙大小相仿;稳定耐受,具有良好的使用寿命;可实现远距离跳跃,具有卓越的越障能力,可搭载多种探测装置,结构简单、易于控制,可完成多项作业任务。
本文地址:https://www.jishuxx.com/zhuanli/20240722/231181.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表