一种冠脉介入手术机器人及控制方法与流程
- 国知局
- 2024-08-19 14:18:53
本发明属于医疗机器人领域,应用于主从式血管介入手术机器人,尤其涉及一种冠脉介入手术机器人及控制方法。
背景技术:
1、介入手术作为目前心脑血管疾病的主要治疗方式,具有创伤小、疼痛少、并发症少等特点。在传统手术过程中,医生需要身着厚重的铅衣抵御手术室的强辐射,同时完成精细且繁琐的器械操作。为了延长医生的职业寿命、提高心血管介入手术的精准性和安全性,血管介入手术机器人应运而生。虽然血管介入手术机器人相较于传统手术具有一定的优势,但现有的血管介入手术机器人的手术器械兼容性不足,只能完成简单的单通道冠脉术式,面对较复杂的分叉病变,因在术中需要使用更多的手术器械,血管介入手术机器人无法兼容,现有的血管介入手术机器人可完成的术式较单一。
技术实现思路
1、本发明的目的在于提供一种冠脉介入手术机器人及控制方法,旨在解决现有技术的血管介入手术机器人只能完成简单的单通道冠脉术式,可完成的术式较单一的技术问题。
2、本发明是这样实现的:
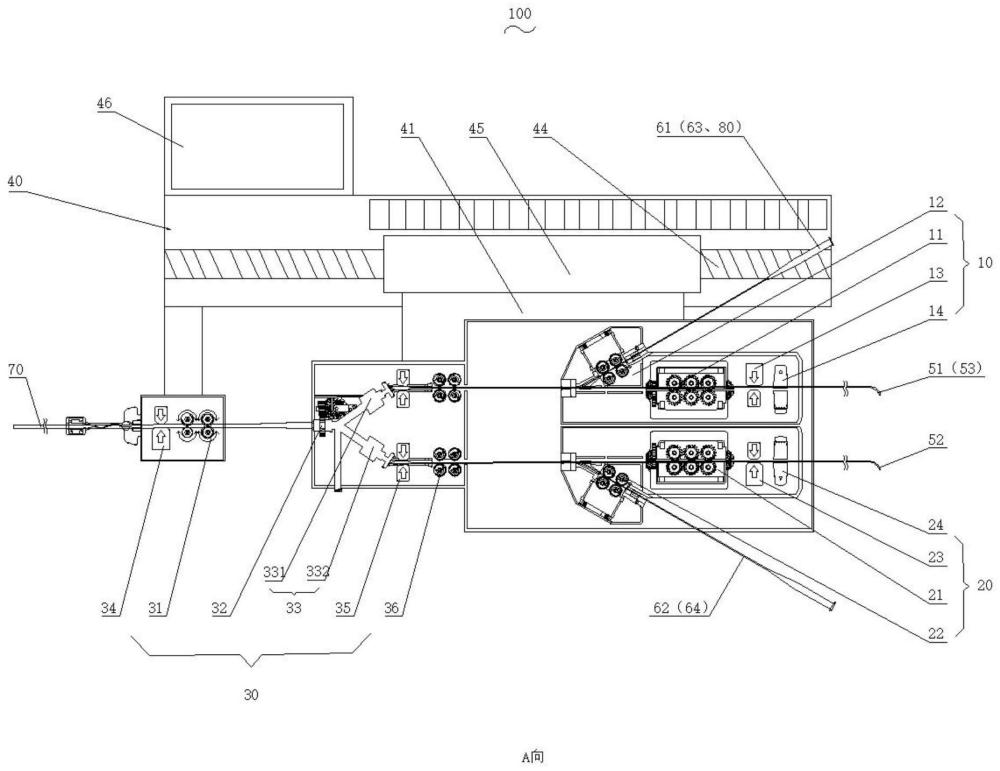
3、本发明第一方面提供一种冠脉介入手术机器人,用于导管、第一导丝、第二导丝、第一快交球囊导管、第二快交球囊导管、第三快交球囊导管、第四快交球囊导管和球囊扩张支架的协同递送,所述冠脉介入手术机器人包括机器人本体、导管递送装置、第一通道器械递送装置组件和第二通道器械递送装置组件,
4、所述机器人本体用于安装所述导管递送装置、所述第一通道器械递送装置组件和所述第二通道器械递送装置组件;
5、所述导管递送装置用于驱动所述导管运动至预定位置;
6、所述第一通道器械递送装置组件用于驱动所述第一导丝运动至第一指定区域;用于驱动所述第一快交球囊导管沿所述第一导丝运动至所述第一指定区域,并回撤所述第一快交球囊导管;用于驱动所述球囊扩张支架沿所述第一导丝运动至所述第一指定区域,并回撤所述球囊扩张支架的球囊;用于驱动所述第一导丝由所述第一指定区域运动至第二指定区域;用于驱动所述第三快交球囊导管沿所述第一导丝运动至所述第二指定区域,并回撤所述第一导丝和所述第三快交球囊导管;
7、所述第二通道器械递送装置组件用于驱动所述第二导丝运动至所述第二指定区域;用于驱动所述第二快交球囊导管沿所述第二导丝运动至所述第二指定区域,并回撤所述第二快交球囊导管;用于驱动所述第二导丝由所述第二指定区域运动至所述第一指定区域;用于驱动所述第四快交球囊导管沿所述第二导丝运动至所述第一指定区域,并回撤所述第二导丝和所述第四快交球囊导管。
8、进一步的,所述第一通道器械递送装置组件包括第一导丝旋转递送机构和第一快交递送机构,所述第一导丝旋转递送机构用于驱动所述第一导丝,所述第一快交递送机构用于驱动所述第一快交球囊导管、所述第三快交球囊导管和所述球囊扩张支架;所述第二通道器械递送装置组件包括第二导丝旋转递送机构和第二快交递送机构,所述第二导丝旋转递送机构用于驱动所述第二导丝,所述第二快交递送机构用于驱动所述第二快交球囊导管和所述第四快交球囊导管。
9、进一步的,所述第一通道器械递送装置组件和所述第二通道器械递送装置组件平行安装于所述机器人本体,所述第一通道器械递送装置组件和所述第二通道器械递送装置组件分别独立沿递送方向移动。
10、进一步的,所述第一通道器械递送装置组件和所述第二通道器械递送装置组件通过基板连接形成一体结构后安装于所述机器人本体,所述第一通道器械递送装置组件和所述第二通道器械递送装置组件分别通过第一连接组件和第二连接组件与所述基板沿所述递送方向活动连接。
11、进一步的,所述第一连接组件包括第一连接板和安装在所述基板上的第一丝杆和第一电机,所述第一通道器械递送装置组件通过所述第一连接板与所述第一电机的壳体固定连接;所述第二连接组件包括第二连接板和安装在所述基板上的第二丝杆和第二电机,所述第二通道器械递送装置组件通过所述第二连接板与所述第二电机的壳体固定连接;所述机器人本体包括第三丝杆和第三电机,所述基板与所述第三电机的壳体固定连接。
12、进一步的,所述导管递送装置包括导管递送机构、导管旋转机构和止血阀,所述导管的尾端通过止血阀安装于所述导管旋转机构,所述导管的前端安装于所述导管递送机构,所述导管递送机构和所述导管旋转机构协作驱动所述导管。
13、进一步的,所述导管递送机构安装于所述机器人本体,所述导管旋转机构和所述止血阀安装于所述基板。
14、进一步的,所述止血阀包括独立的第一阀体和第二阀体,所述第一阀体与所述第一通道器械递送装置组件对应设置,所述第一通道器械递送装置组件递送的器械经所述第一阀体插入所述导管内;所述第二阀体与所述第二通道器械递送装置组件对应设置,所述第二通道器械递送装置组件递送的器械经所述第二阀体插入所述导管内。
15、本发明第二方面提供一种冠脉介入手术机器人的控制方法,用于上述任一项所述的冠脉介入手术机器人,包括以下步骤:
16、s1、所述第一通道器械递送装置组件驱动所述第一导丝运动至所述第一指定区域;所述第二通道器械递送装置组件驱动所述第二导丝运动至所述第二指定区域;
17、s2、所述第一通道器械递送装置组件驱动所述第一快交球囊导管沿所述第一导丝运动至所述第一指定区域,待所述第一快交球囊导管完成预扩后回撤所述第一快交球囊导管;
18、s3、所述第二通道器械递送装置组件驱动所述第二快交球囊导管沿所述第二导丝运动至所述第二指定区域,待所述第二快交球囊导管完成预扩后回撤所述第二快交球囊导管;
19、s4、所述第一通道器械递送装置组件驱动所述球囊扩张支架沿所述第一导丝运动至所述第一指定区域,待所述球囊扩张支架完成支架释放后回撤所述球囊扩张支架的球囊;
20、s5、所述第一通道器械递送装置组件驱动所述第一导丝的头端穿过所述支架的侧面网眼,所述第一导丝由所述第一指定区域运动至第二指定区域;所述第二通道器械递送装置组件驱动所述第二导丝的头端穿设所述支架,所述第二导丝由所述第二指定区域运动至所述第一指定区域,完成所述第一导丝和所述第二导丝的位置互换;
21、s6、所述第二通道器械递送装置组件驱动所述第四快交球囊导管沿所述第二导丝运动至所述第一指定区域,所述第一通道器械递送装置组件驱动所述第三快交球囊导管沿所述第一导丝运动至所述第二指定区域;
22、s7、待所述第三快交球囊导管和所述第四快交球囊导管完成双球囊对吻并进行造影确认后,所述第一通道器械递送装置组件回撤所述第一导丝和所述第三快交球囊导管,所述第二通道器械递送装置组件回撤所述第二导丝和所述第四快交球囊导管,所述导管递送装置回撤所述导管。
23、进一步的,所述步骤s1前还包括步骤s0:所述第一通道器械递送装置组件和所述导管递送装置协同递送造影导丝和所述导管至造影位置后,所述第一通道器械递送装置组件回撤所述造影导丝,启动造影。
24、本发明的有益效果是:本发明通过设置第一通道器械递送装置组件和第二通道器械递送装置组件并进行合理布局,实现了对第一导丝、第二导丝、第一快交球囊导管、第二快交球囊导管、第三快交球囊导管、第四快交球囊导管和球囊扩张支架在不同通道的有序递送,提高了介入手术机器人对手术器械的兼容性,不仅能够完成单通道造影手术,还可以完成针对分叉病变的复杂手术,增加了可完成术式的多样性。
本文地址:https://www.jishuxx.com/zhuanli/20240819/274720.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表