一种协动式管道校装机器人及其校装方法与流程
- 国知局
- 2024-10-21 14:44:57
本发明涉及校装机器人领域,尤指一种协动式管道校装机器人及其校装方法。
背景技术:
1、管道作为基建的基础设施频繁应用于各种复杂环境中,比如建筑物内部、工业厂房、市政道路、地下综合管廊和住宅小区等区域,但应对如此复杂的设置环境现如今常以人工的方式进行安装,由于安装环境往往是空间狭窄局促、安装路面不平整等原因,人工安装难度较高且存在一定的危险,管道安装也需要多人协作完成,且安装过程中携带大量的安装工具,整体成本较高且安装效率较低。
技术实现思路
1、为解决上述问题,本发明提供一种协动式管道校装机器人及其校装方法,可以通过管道校装机器人对管道进行识别、选择、搬运、校准以及安装。
2、为实现上述目的,本发明采用的技术方案是:
3、一种协动式管道校装机器人,包括:主动机器人和从动机器人,主动机器人与从动机器人通信连接,其中:
4、主动机器人包括图像采集模块、图像识别模块和管道匹配模块;
5、图像采集模块,用于获取不同角度的已连接管道图像,图像采集模块设置有互为冗余的双目相机;
6、图像识别模块,用于将所述已连接管道图像转化为三维空间信息;
7、管道匹配模块,用于根据所述三维空间信息,生成与所述已连接管道相匹配的待连接管道参数;
8、从动机器人包括目标抓取模块、校准模块和操作模块;
9、目标抓取模块,用于根据待连接管道参数,识别待连接管道并通过第一机械臂抓取识别到的待连接管道;
10、校准模块,用于对已抓取的待连接管道升举,使已连接管道与待连接管道的连接口对齐并贴紧;
11、操作模块,用于对已校准的待连接管道的连接口与已连接管道固定处理。
12、进一步地,所述已连接管道图像转化为三维空间信息,包括以下步骤:
13、s1:通过预设的双目相机成像模型,选用光轴汇聚模型匹配计算出所述已连接管道图像的两个相机视野中同一物体的像素偏移量,获取物体的三维信息;
14、s2:利用双目立体视觉标定法和坐标系转换关系获得双目相机的位置关系和动态基线,进行立体校正和立体匹配,根据三角测量原理获取深度信息;
15、s3:通过相机内参矩阵和投影关系转换为归一化相机坐标系下坐标,再由坐标系转换关系转换为世界坐标系下坐标,得到空间点的三维坐标,结合三维信息生成三维空间信息。
16、进一步地,所述三维空间信息,生成与已连接管道相匹配的待连接管道参数,包括以下步骤:
17、a1:根据图像识别模块获取管道内径和外径的大小,以及管道内表面粗糙度和弯曲半径,采用聚类分析方法对粗糙度和弯曲半径进行分类,获得管道外形指数;计算管道外径和内径的比值,获得管道壁厚指数;
18、a2:以管道特征为解释变量,管道外形指数和管道壁厚指数为响应变量,构建随机森林模型对管道特征的重要性进行排序,以识别关键区别特征信息;
19、a3:以关键区别特征信息为输入变量,管道外形指数和管道壁厚指数为输出变量,构建bp人工神经网络模型量化二者间的响应关系。
20、进一步地,所有所述待连接管道均设置无源rfid标签,标签存储相应待连接管道的管道信息,包括管道参数、连接方式以及堆放位置坐标,所述第一机械臂设置有读写器和角度传感器;
21、所述根据待连接管道参数,识别待连接管道并通过第一机械臂抓取识别到的待连接管道;包括以下步骤:
22、b1:通过读写器的射频信号获取反射回的标签信息;
23、b2:通过获取到的标签信息与管道匹配模块的管道参数对比,确定待连接管道,再通过第一机械臂抓取对应类型的待连接管道。
24、进一步地,所述对已抓取的待连接管道升举,使已连接管道与待连接管道的连接口对齐并贴紧,包括以下步骤:
25、c1:通过已抓取的待连接管道的连接口靠近已连接管道的连接口;
26、c2:运用改进后的最小二乘法结合角度传感器采集的数据,对已连接管道与待连接管道的连接口进行角度校准对齐;
27、c3:通过第一机械臂校准对齐的待连接管道已平行于已连接管道,向连接口方向平移贴紧后进行连接。
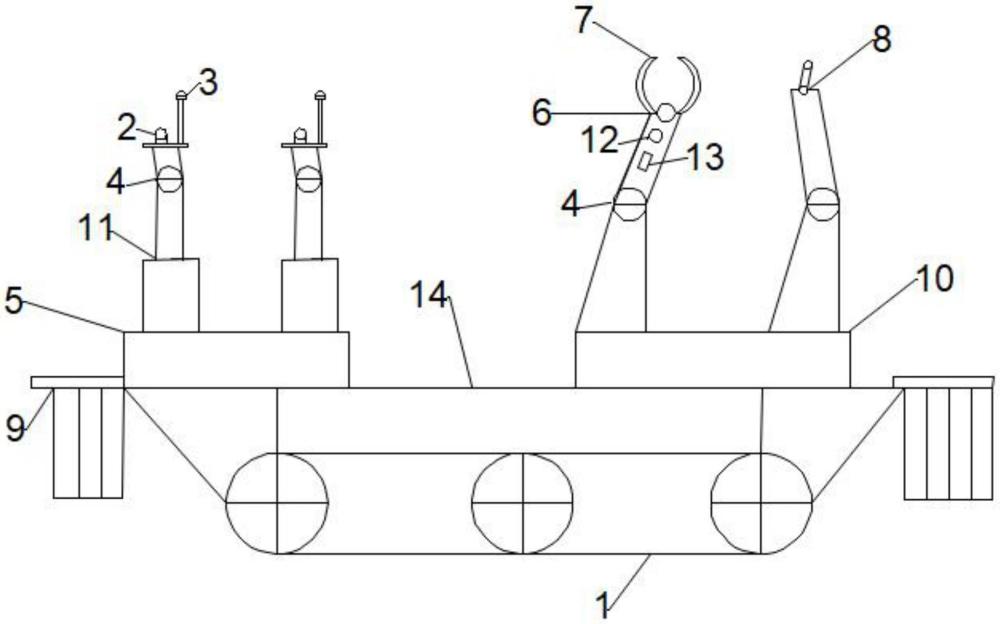
28、进一步地,从动机器人还包括第二机械臂,所述第二机械臂与操作模块连接,第二机械臂的操作头为可拆卸装置。
29、进一步地,还包括固定支架、主动机器人底座和从动机器人底座,所述主动机器人底座和从动机器人底座设置在固定支架上,固定支架的下部设有履带式车轮,固定支架的两端设有配重装置。
30、进一步地,主动机器人上设置有可伸缩支杆和转向轴,用于调换双目相机的角度,双目相机设置有补光设备。
31、进一步地,第一机械臂的抓取部件设置有橡胶垫,抓取部件的中部设置有滚轮。
32、一种协动式管道校装机器人的校装方法,包括以下步骤:
33、d1:主动机器人通过图像采集模块获取已连接管道的图像,经过图像识别模块将已连接管道图像转化为三维空间信息;
34、d2:管道匹配模块将d1转化的三维空间信息生成相匹配的待连接管道参数,并传输到从动机器人;
35、d3:通过从动机器人的目标抓取模块获取待连接管道参数,通过第一机械臂设置的读写器与待连接管道设置的无源rfid标签获取管道信息,匹配确定待连接管道并进行抓取;
36、d4:通过从动机器人的校准模块使已连接管道与待连接管道的连接口对齐并贴紧;
37、d5:通过第二机械臂与操作模块对已连接管道与待连接管道的连接口进行固定处理。
38、本发明的有益效果在于:
39、1.本发明由于图像识别模块通过改进的立体视觉算法还原的三维空间信息,即使已连接管道在拍摄过程中被部分遮挡也可以对管道识别的准确率不受影响,从而大大提高了机器人的工作效率;
40、2.本发明通过深度学习模块在获取已连接管道的实际数据后通过无源rfid标签迅速确认匹配管道,提高了待连接管道的选择准确率和效率,为从动机器人的工作做好铺垫;
41、3.本发明选用改进后的最小二乘法对已连接管道和待连接管道连接角度校准,可减小误差,提高在安装过程中的准确率并提高安装效率;
42、4.本发明通过改进的机械臂对管道进行抓取和固定连接,操作简单且准确,应对不同的安装环境也可以通过调整机械臂角度完成安装,适用于各种安装环境;
43、5.本发明通过管道校装机器人,完成在管道校装过程中的管道识别、选择、搬运、校准和安装,大大减少了人工操作,提高作业质量,即使环境恶劣也不影响管道安装的作业精准度和效率。
技术特征:1.一种协动式管道校装机器人,其特征在于,包括:主动机器人和从动机器人,主动机器人与从动机器人通信连接,其中:
2.根据权利要求1所述的协动式管道校装机器人,其特征在于,所述已连接管道图像转化为三维空间信息,包括以下步骤:
3.根据权利要求1所述的协动式管道校装机器人,其特征在于,所述三维空间信息,生成与已连接管道相匹配的待连接管道参数,包括以下步骤:
4.根据权利要求1所述的协动式管道校装机器人,其特征在于,所有所述待连接管道均设置无源rfid标签,标签存储相应待连接管道的管道信息,包括管道参数、连接方式以及堆放位置坐标,所述第一机械臂设置有读写器和角度传感器;
5.根据权利要求4所述的协动式管道校装机器人,其特征在于,所述对已抓取的待连接管道升举,使已连接管道与待连接管道的连接口对齐并贴紧,包括以下步骤:
6.根据权利要求1所述的协动式管道校装机器人,其特征在于,从动机器人还包括第二机械臂,所述第二机械臂与操作模块连接,第二机械臂的操作头为可拆卸装置。
7.根据权利要求1所述的协动式管道校装机器人,其特征在于,还包括固定支架、主动机器人底座和从动机器人底座,所述主动机器人底座和从动机器人底座设置在固定支架上,固定支架的下部设有履带式车轮,固定支架的两端设有配重装置。
8.根据权利要求1所述的协动式管道校装机器人,其特征在于,主动机器人上设置有可伸缩支杆和转向轴,用于调换双目相机的角度,双目相机设置有补光设备。
9.根据权利要求1所述的协动式管道校装机器人,其特征在于,第一机械臂的抓取部件设置有橡胶垫,抓取部件的中部设置有滚轮。
10.一种如权利要求1-9任一项所述的协动式管道校装机器人的校装方法,其特征在于,包括以下步骤:
技术总结本发明涉及校装机器人领域,尤指一种协动式管道校装机器人及其校装方法,包括:主动机器人和从动机器人,主动机器人与从动机器人通信连接,其中:主动机器人包括图像采集模块、图像识别模块和管道匹配模块;图像识别模块,用于将所述已连接管道图像转化为三维空间信息;管道匹配模块,用于根据所述三维空间信息,生成与所述已连接管道相匹配的待连接管道参数;从动机器人包括目标抓取模块、校准模块和操作模块。本发明通过协动式管道校装机器人及其校装方法,机器人完成在管道校装过程中的管道识别、选择、搬运、校准和安装,大大减少了人工操作,提高作业质量,即使环境恶劣也不影响管道安装的作业精准度和效率。技术研发人员:陈朝静,任德明,曹明生,舒波,刘强,杨雷,许谟,张聪,张杰受保护的技术使用者:中国建筑第四工程局有限公司技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/319162.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
锁装置及机动车的制作方法
下一篇
返回列表