一种预算约束下的交通检测器布局优化及路径流估计方法
- 国知局
- 2024-07-31 20:45:43
本发明属于交通检测,具体涉及一种预算约束下的交通检测器布局优化及路径流估计方法。
背景技术:
1、为了有效应对交通拥堵问题,必须建立起高效的交通监控系统。随着图像识别技术的提升与成熟,车辆自动识别(automatic vehicle identification,avi)传感器我国得到了广泛应用。avi传感器能够更加全面地捕获车辆行驶信息,包括车牌号码、出现时间位置以及瞬时速度等。通过合理布置avi检测器,我们不仅可以直接获取检测断面的交通流量,还可以推断出全局网络上各路径的交通流分布情况。
2、考虑到avi检测器高昂的成本,如何在有限的成本预算下,优化检测器的布局,以实现对全局网络路径流量的最大化观测,是近年来主管部门和研究人员共同关注的焦点。然而,目前的方法往往更注重时段统计数据,而忽视了个体运行信息,也未能充分利用avi数据中记录的个体出行时间信息。尽管这些方法能够提供有限预算下路网最大化观测的检测器布局方案,但无法保证所需检测器的数量最少,从而增加了交通检测系统建设的成本。
3、公开号为cn103489316b的发明中公开了一种基于路网拓扑关系的网络交通流量检测器布设方法,首先将路网内的路段划分为路网进口路段、出口路段和内部路段三类,并确定有交通生成的路段,所需的最少检测路段数量即为路网进口路段与有交通生成路段数之和;然后根据交叉口交通流量守恒规律,建立路网流量守恒方程组;接着根据道路等级与费用对路段进行检测优先排序,取其逆序作为检测权重;最后以检测路段集的优先性最高为优化目标,以检测器布设的数量、检测器优化系数矩阵的秩为约束条件,建立检测器布设优化模型,并采用贪婪算法进行求解,确定检测器的最优布设位置。该发明可在降低路网交通流检测系统建设与维护费用的同时,避免od矩阵调查的高昂成本和出行者路径选择行为的失真假设。但是并不能解决有限预算下路网最大化观测的检测器布局的技术问题。
技术实现思路
1、解决的技术问题:针对现有研究更注重时段统计数据,虽然能够提供有限预算下路网最大化观测的检测器布局方案,但无法保证所需检测器的数量最少的技术问题,本发明公开了一种预算约束下的交通检测器布局优化及路径流估计方法,利用车辆自动识别检测器中的出行时间数据,在有限的检测器预算约束下,实现了使用更少的检测器完成路径数量的最大化观测,并在此基础上改进了传统的路径流量估计模型,将计算得到的可观测路段数据纳入传统的流量估计模型,实现有限观测条件下的全局网络路径流量估计。
2、技术方案:
3、一种预算约束下的交通检测器布局优化及路径流估计方法,所述交通检测器布局优化及路径流估计方法包括以下步骤:
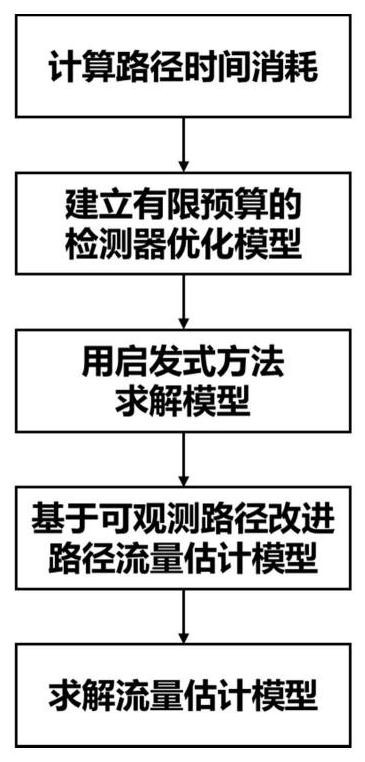
4、s1、根据路径时间消耗分布曲线计算得到路网中所有路径的时间消耗;
5、s2、建立有限检测器数量预算约束下的道路交通检测器布局优化模型;
6、s3、求解道路交通检测器布局优化模型,得到检测器布局方案;
7、s4、基于检测器布局方案,建立改进的路径流量估计模型;
8、s5、结合检测器的观测数据,求解改进的路径流量估计模型,完成路径流量估计。
9、进一步地,步骤s1中,根据样本数据估计路径时间消耗分布曲线的过程包括以下步骤:
10、假定路径时间消耗服从对数正态分布,即ln(cp)~n(μ,σ),则:
11、
12、
13、
14、其中,exp(cp)和var(cp)分别是每条路径时间消耗cp的期望和方差;对于每一条路径p,exp(cp)和var(cp)都是统计该路径上所有路段的车辆gps数据得到的;计算所有路段上的车辆平均时间消耗,得到exp(cp):
15、
16、其中,cl,n是第n个gps样本在路段l上的时间消耗,nl是路段l的gps样本总数;计算所有路段上的车辆时间消耗方差,得到var(cp):
17、
18、其中var(cl)是路段l的车辆时间消耗方差。
19、进一步地,步骤s2中,所述道路交通检测器布局优化模型为:
20、
21、其中,a,b为路段编号;r,r′为路径百年好;a为所有路段的集合;r为所有路径的集合;za和zb为0-1变量,分别表示是否在路段a或路段b设置检测器,若路段a设置检测器,则za=1,反之为0;为0-1变量,表示路段a是否在路径r上,若路段a在路径r上,则反之为0;yr为0-1决策变量,表示路径r是否被观测,若路径r可观测,则yr=1,反之为0;b为允许安装的检测器数量上限;为路段a和b都设置检测器时,路径r1和r2的时间可区分度,其计算公式为:
22、
23、其中,f(cp)为路径p的时间消耗分布曲线;t0为两条路径时间消耗曲线和的交点的横坐标,其等价于方程的解。
24、进一步地,步骤s3中,求解道路交通检测器布局优化模型的过程包括以下步骤:
25、s3-1、初始化布置传感器的路段集u为空集:
26、s3-2、判断u是否为有限检测器数量预算约束下的道路交通检测器布局优化模型的可行解;若u不可行,转入步骤s3-3;若u可行,则返回u作为初始最优解;
27、s3-3、选取|cov(u,a)|+|div(u,a)|最大值对应的路段a;若最大值不唯一,则依照初始路段次序集中的路段顺序选定新的设置传感器的路段,并更新布置传感器的路段集u,转到步骤s3-2;
28、上述|cov(u,a)|+|div(u,a)|中,a为新增的布置检测器的路段,cov(u,a)为新增的满足约束的路径r的数量,div(u,a)为新增的满足约束的路径对(r,r′)的数量。
29、初始路段次序集的定义为:当u为空集时,根据|cov(u,a)|+|div(u,a)|的大小,对所有路段排序即得到所述初始路段次序集。
30、进一步地,步骤s4中,所述改进的路径流量估计模型为:
31、
32、其中,fa表示路段a上估计的交通量;f′a和f′w,r分别表示被观测到的路段和路径的交通量;w和r分别为路网中的所有od对和od对之间的所有路径r的集合;m和n分别表示观测到的路段集合和未观测到的路段集合;a为所有路段的集合;θ表示离散参数;∈a表示路段a上的允许的交通量测量误差;fw,r表示od对w中包含的路径r上估计的交通量;ca和ta表示路段a上的容量和旅行时间;为0-1变量,表示路段a是否在路径r上,若路段a在路径r上,则反之为0。
33、进一步地,步骤s5中,通过启发式方法或优化求解器求解改进的路径流量估计模型。
34、有益效果:
35、第一,本发明的预算约束下的交通检测器布局优化及路径流估计方法,充分利用avi检测器中的出行时间数据,在有限的检测器预算约束下,实现了使用更少的检测器完成路径数量的最大化观测。
36、第二,本发明的预算约束下的交通检测器布局优化及路径流估计方法,基于已被观测的路径流量,改进了传统路径流量估计模型的约束条件,实现了更准确的路径流量估计。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187748.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表