基于势场理论的多航空器实时交互风险评估方法及系统
- 国知局
- 2024-07-31 20:47:16
本发明涉及空中交通管制,特别涉及一种基于势场理论的多航空器实时交互风险评估方法及系统。
背景技术:
1、航班量的不断增长增加了空中交通的复杂性,导致运行条件不断变化,对空中交通管制提出了更高的安全要求。在空中交通系统中,航空器主要沿着航路航行。然而,错综复杂的航路网络不可避免地会产生许多相交和汇聚点,这就要求航空器需要保持一定的安全间隔。此外,航空器需要在机场和航路之间转换,这都进一步增加了空中交通管理的工作量。与地面交通不同的是,航空器与航空器之间或者航空器与空中交通要素之间的交互通常被限制在固定的间隔模式之下,而且精度要求较高,所以在空域中保持特定的水平或垂直间隔是一项较为复杂的任务。考虑到空中交通运行的规则和航空器飞行性能限制,这种复杂交互行为将会对航空器运行带来巨大的风险。因此,建立一种针对复杂空中交通场景的交互式风险评估方法至关重要,旨在揭示空中交通各种复杂要素之间的相互作用机制。
技术实现思路
1、本发明的目的在于提供一种基于势场理论的多航空器实时交互风险评估方法及系统,以提高风险评估的准确性,为更合理制定空中交通管制策略提供技术支持。
2、为了实现上述发明目的,本发明实施例提供了以下技术方案:
3、一种基于势场理论的多航空器实时交互风险评估方法,包括以下步骤:
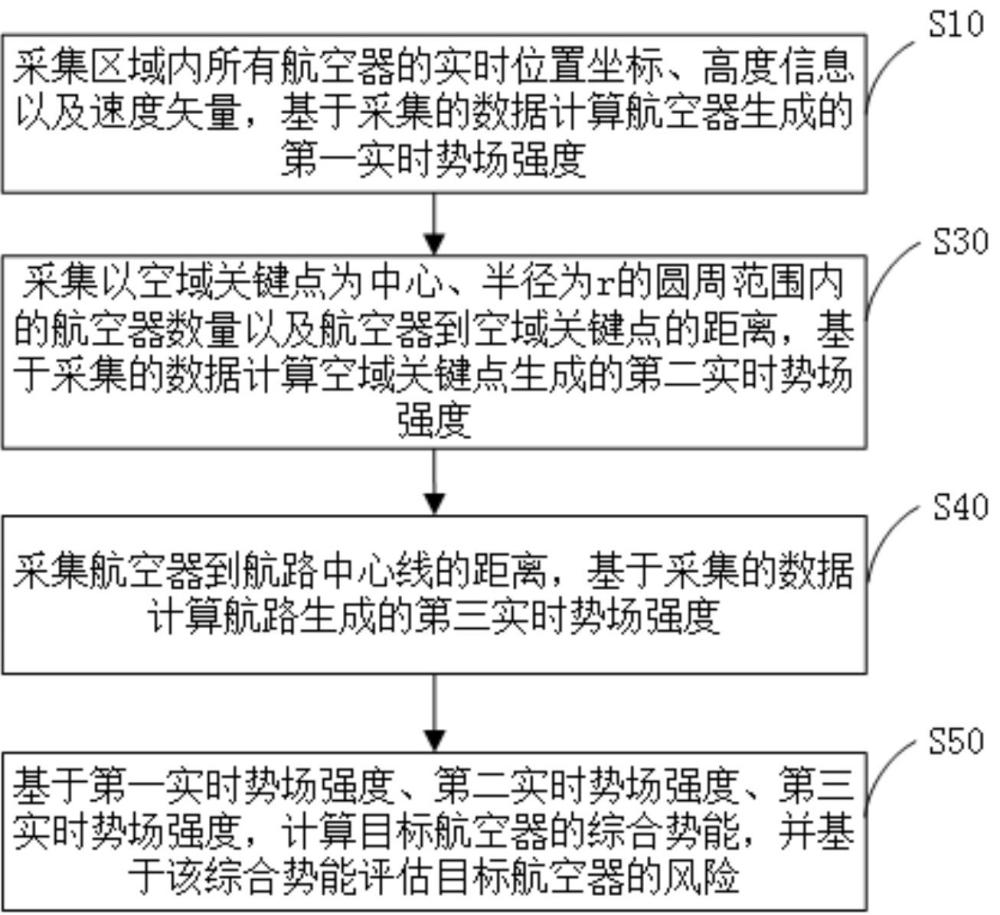
4、s10,采集区域内所有航空器的实时位置坐标、高度信息以及速度矢量,基于采集的数据计算航空器生成的第一实时势场强度;
5、s30,采集以空域关键点为中心、半径为r的圆周范围内的航空器数量以及航空器到空域关键点的距离,基于采集的数据计算空域关键点生成的第二实时势场强度;
6、s40,采集航空器到航路中心线的距离,基于采集的数据计算航路生成的第三实时势场强度;
7、s50,基于第一实时势场强度、第二实时势场强度、第三实时势场强度,计算目标航空器的综合势能,并基于该综合势能评估目标航空器的风险。
8、上述方案中,充分考虑了航空器在空域中的复杂环境,从势场角度分别分析了势场源航空器、空域关键点、航路对目标航空器的影响,以综合势能评估目标航空器的风险,准确度高,可靠性好,为更合理制定空中交通管制策略提供了技术支持。
9、所述s10中,按照如下公式计算得到第一实时势场强度:
10、;
11、;
12、式中,为第一实时势场强度,表示航空器的速度矢量与势场源航空器质心方向的夹角;为场强系数,参数为高斯函数的方差,表示航空器的伪距离,、c、λ均为设置的参数,为势场源航空器运行方向与x轴之间的夹角,β为势场源航空器运行方向与y轴之间的夹角,γ为势场源航空器运行方向与z轴之间的夹角,为势场源航空器质心的空间位置坐标,(x,y,z)为空间内的点的空间位置坐标。
13、在所述s30之前,还包括步骤s20,搜集航空器的历史航迹,根据历史航迹计算历史航迹势场强度,并用历史航迹势场强度修正所述第一实时势场强度;
14、所述s50中则是基于修正后的第一实时势场强度、第二实时势场强度、第三实时势场强度计算目标航空器的综合势能。
15、上述方案中,还考虑了历史航迹对目标航空器的影响,通过历史航迹势场强度对第一实时势场强度进行修正,使得修正后的第一实时势场强度更加准确,继而进一步提高目标航空器风险评估结果的准确度。
16、所述s20包括以下步骤:
17、s201,建立参考航迹集的时空边界;
18、s202,基于所述参考航迹集的时空边界确定参考航迹点;
19、s203,基于所述参考航迹点筛选出对航空器产生影响的历史航迹点;
20、s204,基于筛选出的历史航迹点计算历史航迹势场强度;
21、s205,用历史航迹势场强度修正所述第一实时势场强度。
22、所述s30中,按照如下公式计算空域关键点生成的第二实时势场强度:
23、;
24、式中,为第二实时势场强度,nw表示在半径为r的圆周范围内汇聚到空域关键点的航空器数量,alw为航空器到空域关键点的距离,和均是参数。
25、所述s40中,按照如下公式计算航路生成的第三实时势场强度:
26、;
27、式中,为第三实时势场强度,alr表示从航空器到航路中心线的距离,和均为参数。
28、所述s50中,采用如下公式计算目标航空器的综合势能:
29、,;
30、,;
31、,;
32、;
33、表示目标航空器的尾流水平,、为待确定的参数;是速度v与势场源航空器之间的夹角,为第一实时势场强度,为第二实时势场强度,为第三实时势场强度,pea表示目标航空器相对于势场源航空器的势能之和,pew表示目标航空器相对于空域关键点的势能之和,per表示目标航空器相对于航路的势能之和,risk_pe表示目标航空器的综合势能,fa表示目标航空器相对于势场源航空器的势场力,fw表示目标航空器相对于空域关键点的势场力,fr表示目标航空器相对于航路的势场力。
34、所述s50中,采用如下公式计算目标航空器的综合势能:
35、,;
36、,;
37、,;
38、;
39、表示目标航空器的尾流水平,、为待确定的参数;是速度v与势场源航空器之间的夹角,为修正后的第一实时势场强度,为第二实时势场强度,为第三实时势场强度,pea+h表示经过修正后的目标航空器相对于势场源航空器的势能之和,pew表示目标航空器相对于空域关键点的势能之和,per表示目标航空器相对于航路的势能之和,risk_pe表示目标航空器的综合势能,fa+h表示修正后目标航空器相对于势场源航空器的势场力,fw表示目标航空器相对于空域关键点的势场力,fr表示目标航空器相对于航路的势场力。
40、一种基于势场理论的多航空器实时交互风险评估系统,包括:
41、数据采集模块,用于采集航空器的运行数据,所述运行数据包括航空器的实时位置坐标、高度信息、速度矢量、以空域关键点为中心半径为r的圆周范围内的航空器数量、航空器到空域关键点的距离、航空器到航路中心线的距离;
42、第一实时势场强度计算模块,用于根据采集的航空器的实时位置坐标、高度信息、速度矢量,计算航空器生成的第一实时势场强度;
43、第二实时势场强度计算模块,用于根据采集的以空域关键点为中心半径为r的圆周范围内的航空器数量、航空器到空域关键点的距离,计算空域关键点生成的第二实时势场强度;
44、第三实时势场强度计算模块,用于根据采集的航空器到航路中心线的距离,计算航路生成的第三实时势场强度;
45、风险评估模块,基于第一实时势场强度、第二实时势场强度、第三实时势场强度,计算目标航空器的综合势能,并基于该综合势能评估目标航空器的风险。
46、还包括修正模块;
47、所述数据采集模块还用于搜集航空器的历史航迹;
48、所述修正模块用于根据历史航迹计算历史航迹势场强度,并用历史航迹势场强度修正所述第一实时势场强度;
49、所述风险评估模块具体用于,根据修正后的第一实时势场强度、第二实时势场强度、第三实时势场强度计算目标航空器的综合势能,并基于该综合势能评估目标航空器的风险。
50、与现有技术相比,本发明有助于制定更高运行效率的交互间隔策略,并支持空中交通管制中心进行实时风险评估,以减少潜在冲突。
51、本发明所具有的其他技术优势在后文实施例中进行相应阐述。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187779.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。