混合交通流环境下高速公路移动瓶颈限速控制方法
- 国知局
- 2024-07-31 21:10:34
本发明涉及高速公路移动瓶颈,具体地说,尤其涉及一种混合交通流环境下高速公路移动瓶颈的可变限速控制方法。
背景技术:
1、目前,在高速公路主线路段,可变限速(variable speed limit,vsl)控制成为一种新型的用于高速公路主线瓶颈路段速度控制方式。通过在路段上设置一系列带有可变速度显示牌的龙门架的方式,在车流量较大的高速公路主线路段,控制瓶颈上游交通流的整体流速逐渐与瓶颈路段流速靠拢,从而达到缓和交通流量、减少路段行程时间和提高交通整体安全性的目的。
2、可变限速控制多涉及宏观交通流模型以及元胞自动机(cellular automata,ca)、元胞传输模型(cell transmission model,ctm)等中微观模型,描述不同种类车辆在高速公路瓶颈路段的运行状态,并采用以mpc(model predictive control,模型预测控制)或最优控制为主的可变限速控制机制完成。
3、目前对于移动瓶颈的研究,更多关注于重型车辆产生的屏障效应,通过理论研究或者模型仿真寻求解决方案。所研究的高速公路交通环境更多为传统交通流,对于车联网车辆加入对移动瓶颈的改善效果研究并不充分。同时,对于在道路主线路段应用可变限速控制手段解决移动瓶颈效果研究十分稀少,可变限速控制效果尚未充分探讨。
技术实现思路
1、本发明的目的在于解决现有技术的缺点与不足,提供一种混合交通流环境下高速公路移动瓶颈限速控制方法,通过可变限速控制手段,降低高速公路主线行程时间,提升车辆运行速度,实现高速公路服务的降本增效。
2、为了实现上述目的,本发明所采用的技术方案如下:
3、一种混合交通流环境下高速公路移动瓶颈限速控制方法,包括以下步骤:
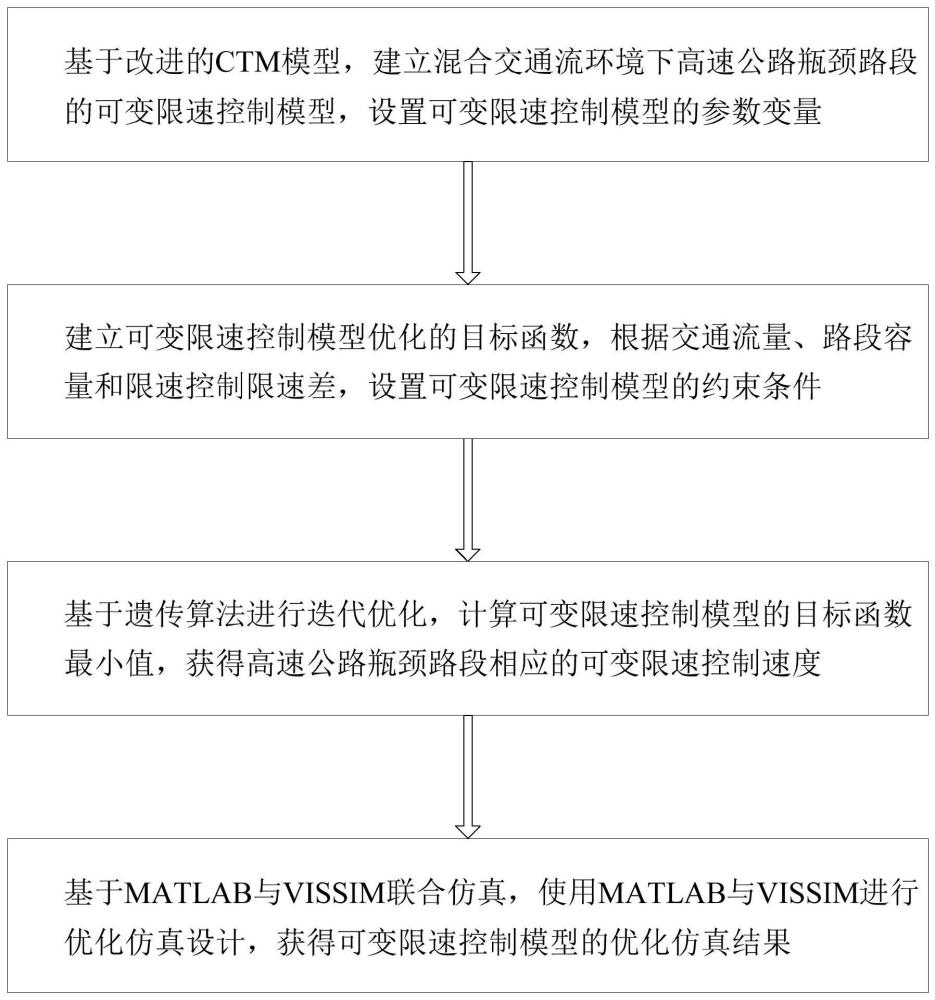
4、基于改进的ctm模型,建立混合交通流环境下高速公路瓶颈路段的可变限速控制模型,设置可变限速控制模型的参数变量;
5、建立可变限速控制模型优化的目标函数,根据交通流量、路段容量和限速控制限速差,设置可变限速控制模型的约束条件;
6、基于遗传算法进行迭代优化,计算可变限速控制模型的目标函数最小值,获得高速公路瓶颈路段相应的可变限速控制速度;
7、基于matlab-vissim联合仿真,使用matlab与vissim进行优化仿真计算,获得可变限速控制模型的优化仿真结果。
8、进一步地,ctm模型为lwr模型在时空上离散化得到的交通流模型,用于描述路段内车流密度变化情况,反映路段交通运行状况;
9、经典的ctm模型将道路路段划分为若干相同间距的元胞,每个元胞代表一个特定的路段,将时间细分成相等间隔,模拟交通流的运行状态,从流量角度描述路段交通变化;
10、ctm模型中车辆在元胞之间移动并根据设定的规则进行转移,改进的ctm模型将流量转化为密度,可变限速控制模型通过预测路段交通流密度的方式滚动迭代交通流密度。
11、进一步地,设置可变限速控制模型的参数变量,具体为:
12、交通仿真路段长度为l,其由n个细胞组成,每一个细胞长度相同且为l,l=nl;
13、道路上共有j种车辆,j=1为小汽车,j=2为重型货车,j=3为cav车辆,j型车辆的总停车距离为sdj,j型车辆的平均车头时距为hwj;
14、交通仿真间隔时间长为k,k时间段流入细胞i的j型车辆的车流量为k时间段流入细胞i的j型车辆的车流速度为k时间段流入细胞i的j型车辆的车流密度为k时间段流入第一个细胞的j型车辆的交通流量为k时间段流入第一个细胞的j型车辆的车流密度为k时间段细胞i内j型车辆的车流密度为k时间段细胞i内的可变限速值为
15、细胞i的所有前向细胞集合为所有后向细胞集合为
16、进一步地,建立可变限速控制模型优化的目标函数,包括:
17、根据改进的ctm模型的交通流密度迭代公式,得到
18、
19、式中,为k+1时间段内细胞i内j型车辆的车流密度,下一时间段细胞i内车辆的车流密度等于当前时间段细胞i内车辆的车流密度加上当前时间段内驶入细胞交通流换算密度减去驶出细胞交通流换算密度;
20、对于小汽车和cav车辆,当前时间段驶入细胞交通流量等于当前时间段驶入细胞交通流密度乘以可变限速值表示为
21、
22、公式(1)改写为
23、
24、式中,为k时间段流入细胞i-1的j型车辆的车流密度;
25、对于第一个细胞而言,公式变为
26、
27、式中,为k时间段流入第一个细胞的j型车辆的车流密度;
28、对于重型货车,则流入流量等于路段重型货车平均速度乘以路段重型货车密度,表示为
29、
30、重型货车交通流密度对应式(3)和式(4)依次更改;
31、为准确衡量重型货车在仿真过程中占有的交通资源大小,引入动态等效车当量系数dpce,小汽车的动态等效车当量系数dpce值恒为1,对于其他车型,动态等效车当量系数dpce值的计算公式为
32、ηj(k)=[sdj+hwjvi,j(k)]/[sdcar+hwcarvi,car(k)] (6)
33、式中,sdj为j型车辆的总停车距离,等于车辆在路段上的总停车次数乘以车辆的车长;hwj为j型车辆的平均车头时距;sdcar为小汽车的总停车距离;hwcar为小汽车的平均车头时距;vi,j(k)为k时间段细胞i内j型车辆的速度;vi,car(k)为k时间段细胞i内小汽车的速度;ηj(k)为k时间段j型车辆的动态等效车当量系数dpce值。
34、进一步地,建立可变限速控制模型的目标函数,包括:
35、优化的目标函数表示为
36、minf=α×td+β×tsd (7)
37、式中,α和β为系数,α与β的最优解比值为
38、α/β=1/100 (8)
39、td为路段内车辆总延误,描述为k时间段细胞i内所有未驶出细胞的车辆经过时间之和,未驶出细胞的车辆表示k时间段细胞现有车辆减去k时间段驶出细胞车辆;tsd为计算的可变限速值与实际车辆运行速度之差;
40、在k-1时间段末尾,即k时间段初需要预测k时间段的最小总延误,k时间段路段内车辆总延误表示为
41、
42、式中,减去的总流出流量表示k时间段从细胞i流出至细胞i+1的流量;
43、将公式(2)带入上式(9)中,得到k时间段细胞i内j型车辆的延误为
44、
45、式中,为k-1时间段内细胞i内j型车辆的车流密度;为k-1时间段流入细胞i-1的j型车辆的车流密度;为k-1时间段内细胞i内的可变限速值;为k-1时间段流入细胞i的j型车辆的车流密度;为k-1时间段流入细胞i-1的重型货车的车流密度;为k-1时间段流入细胞i的重型货车的车流密度;η2(k)为k时间段重型货车的动态等效车当量系数dpce值;为k-1时间段第二个细胞内的可变限速值;
46、当i=1时,k时间段第一个细胞内j型车辆的延误为
47、
48、式中,为k-1时间段内细胞i内j型车辆的车流密度;为k-1时间段流入细胞i-1的j型车辆的车流密度;为k-1时间段流入细胞i-1的重型货车的车流密度;为k-1时间段流入细胞i的重型货车的车流密度;
49、η2(k)为k时间段重型货车的动态等效车当量系数dpce值;为k-1时间段重型货车的速度;为k-1时间段内细胞i内的可变限速值;为k-1时间段内第一个细胞内的可变限速值;
50、k时间段可变限速值与实际车辆运行速度之差表示为
51、
52、为保障可变限速值大于路段限速,公式(12)变为
53、
54、式中,为k时间段流入细胞i-1的j型车辆的车流速度。
55、进一步地,设置可变限速控制模型的约束条件,具体为:
56、流入细胞i的车流量小于或等于细胞i最大交通流量,表示为
57、
58、式中,为细胞i最大交通流量;
59、流入细胞的车流量小于或等于下游细胞能容纳的最大流量,表示为,
60、
61、式中,w为细胞冲击波速度;pj为j型车辆的拥挤密度;为k时间段细胞i的车流密度;
62、为保障可变限速平滑,相邻细胞的可变限速差小于设定的速度固定值,细胞的可变限速值小于高速公路路段最大限速值并大于最小限速值,表示为
63、
64、
65、
66、
67、式中,为k时间段细胞i+1内的可变限速值;vdiffer为设定的速度固定值;vmax为高速公路路段最大限速值;vmin为高速公路路段最小限速值。
68、进一步地,基于遗传算法进行迭代优化,计算可变限速控制模型的目标函数最小值,包括:
69、遗传算法的目标变量为k时间段所有i路段的可变限速值是长度为n的行向量,遗传算法的适应度函数为f,由式(7)、式(10)、式(11)和式(13)可知
70、
71、上一时间段k-1的可变限速值作为下一时间段k的可变限速值的初始种群,设定仿真开始时的初始种群并且,所有可变限速值都为整数;
72、线性约束变量负责约束相邻两细胞的可变限速差小于设定的速度固定值vdiffer,用矩阵表示为
73、
74、
75、式中,为k时间段细胞1内的可变限速值;为k时间段细胞2内的可变限速值;为k时间段细胞n内的可变限速值;
76、非线性约束函数表示为
77、
78、
79、ceq=[]。
80、进一步地,基于matlab-vissim联合仿真,使用matlab与vissim进行优化仿真计算,包括:
81、可变限速控制模型基于模型预测控制理论,从仿真时间段k初始时刻开始进行以下步骤:
82、vissim收集检测器初始数据,并传输至matlab内完成数据的储存和处理;
83、matlab调用遗传函数完成运算,生成各路段可变限速值;
84、更新各路段内交通流密度和遗传算法的初始种群,交通流密度更新为当前时间段内的交通流密度根据可变限速控制模型进行计算
85、
86、在下一个仿真时间段k+1,被用于预测细胞内交通流密度;
87、可变限速控制参数回传至vissim中作为k时间段内的限速控制值,vissim开始当前时间段内仿真;
88、重复上述步骤,直至达成可变限速控制模型优化目标。
89、与现有技术相比,本发明基于改进的ctm模型,建立混合交通流下的可变限速控制模型,通过预测路段交通流密度的方式滚动迭代交通流密度,目标函数为未驶出路段所有车辆的总延误与可变限速控制速度与实际路段速度之差的线性组合。根据反向波、细胞最大容量、可变限速控制限速差,设置可变限速控制模型的约束条件。采用遗传算法对可变限速控制模型进行最优化求解,通过可变限速控制手段,降低高速公路主线行程时间,提升车辆运行速度,实现高速公路服务的降本增效。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188709.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表