一种基于数字孪生虚实结合的混合交通流测试方法及系统
- 国知局
- 2024-07-31 20:51:52
本发明涉及自动驾驶测试方法,具体涉及一种基于数字孪生虚实结合的混合交通流测试方法及系统。
背景技术:
1、在自动驾驶汽车真正商业化应用之前,需要进行大量的道路测试以满足商用要求。然而,传统的道路测试会消耗大量人力和物力,可能导致车辆损坏和人员伤害,同时经济性和安全性也难以保证。随着仿真技术水平的提升和软硬件性能的改善,自动驾驶仿真逐渐成为测试自动驾驶系统性能的关键环节。大型自动驾驶仿真技术依靠高性能计算平台,借助自动驾驶仿真器提供的场景和车辆配置,完成自动驾驶系统的闭环仿真测试,使自动驾驶的研发更加高效和经济,但是,单一的仿真测试由缺乏真实性,很难进行商用落地。
2、自动驾驶车辆虚实结合测试平台是自动驾驶车辆虚实结合测试的主要工具,在测试过程中将真实的自动驾驶车辆置于真实的道路环境中,通过测试平台向自动驾驶系统注入虚拟的交通目标物,实现自动驾驶车辆的虚实结合测试。
3、相较于单一的实车测试和仿真测试,虚实结合测试的场景配置更加灵活,场景覆盖率高,测试过程安全,并且可实现自动测试和云端加速测试,有利于提升测试效率和降低测试成本,并且基于数字孪生的数字场景,测试实验的可行性和真实性更高
技术实现思路
1、本发明提供一种基于数字孪生虚实结合的混合交通流测试方法及系统,以解决现有的问题:
2、本发明的一种基于数字孪生虚实结合的混合交通流测试方法及系统采用如下技术方案:
3、本发明一个实施例提供了一种基于数字孪生虚实结合的混合交通流测试方法,该方法包括以下步骤:
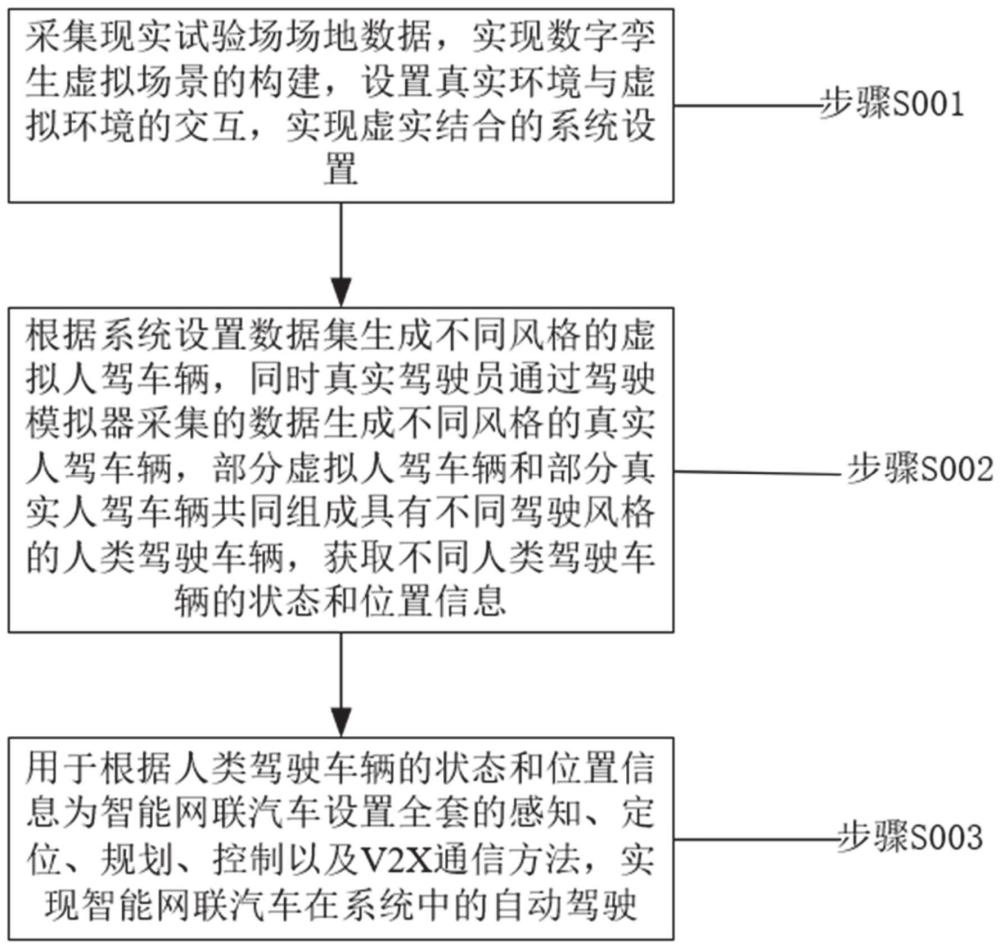
4、采集现实试验场场地数据,实现数字孪生虚拟场景的构建,设置真实环境与虚拟环境的交互,实现虚实结合的系统设置;
5、根据系统设置数据集生成不同风格的虚拟人驾车辆,同时真实驾驶员通过驾驶模拟器采集的数据生成不同风格的真实人驾车辆,部分虚拟人驾车辆和部分真实人驾车辆共同组成具有不同驾驶风格的人类驾驶车辆,获取不同人类驾驶车辆的状态和位置信息;
6、根据人类驾驶车辆的状态和位置信息为智能网联汽车设置全套的感知、定位、规划、控制以及v2x通信方法,实现智能网联汽车在系统中的自动驾驶。
7、进一步地,所述采集现实试验场场地数据,实现数字孪生虚拟场景的构建,设置真实环境与虚拟环境的交互,实现虚实结合的系统设置,包括的具体方法为:
8、采集真实的自动驾驶试验场的场地数据,构建点云地图,构建三维重建的场景完成数字孪生的虚拟环境的基本构建;在虚拟环境中导入实车的外观、物理模型及骨骼,生成实车在虚拟环境中的映射,将车辆的状态、控制信息通过数据传输至虚拟环境中更新车辆状态,对智能联网汽车进行建模并同步传入现实场景中,对实车进行控制;虚拟交通参与者通过虚实结合测试设备完成场景编辑,真实交通参与者则通过穿戴设备,实时传输自身的姿态进入该系统中;
9、虚拟测试车辆根据获取的真实车辆状态、控制信息以及虚拟场景信息在虚拟环境下执行决策、规划与控制功能,并将虚拟车辆的状态与控制信息通过数据交互协议传输至kafka服务端,并通过kafka服务端传送至真实测试车辆,真实车辆在真实环境下完成控制信息的执行。
10、进一步地,所述根据系统设置数据集生成不同风格的虚拟人驾车辆,同时真实驾驶员通过驾驶模拟器采集的数据生成不同风格的真实人驾车辆,部分虚拟人驾车辆和部分真实人驾车辆共同组成具有不同驾驶风格的人类驾驶车辆,获取不同人类驾驶车辆的状态和位置信息,包括的具体方法为:
11、通过使用数据集和真实驾驶员通过驾驶模拟器采集的数据,将数据进行清洗和降噪处理后,通过聚类分析将人类驾驶员风格分为保守型、常规型、激进型,建立具有不同驾驶风格的人类驾驶员模型,之后使用sumo生成不同驾驶风格的人驾车辆,运用正态分布对不同类型的车辆进行各类相对应的参数的标定:
12、
13、其中,μ为数学期望,σ2为方差,x即为服从参数为μ、σ的正态分布;
14、用状态向量x表示不同类型车辆需要进行不同标定的参数,根据正态分布对状态向量中的不同变量进行驾驶员风格划分,获得不同驾驶风格的虚拟人驾车辆;同时,由真实驾驶员通过驾驶模拟器驾驶部分真实车辆,形成真实人驾车辆,与虚拟人驾车辆车辆共同组成不同渗透率下具有不同驾驶员风格的人类驾驶车辆,获得不同人类驾驶车辆的状态和位置信息。
15、进一步地,所述定位方法,包括的具体方法为:
16、定义卡尔曼滤波的状态向量,其要包含导航状态误差和传感器误差,定义如下:
17、
18、式中,为姿态误差向量,aa为加速度计比例因子误差向量,ag为陀螺比例因子误差向量,ba为三轴加速度计零偏误差向量,bg为三轴陀螺零偏误差向量,δrn为惯性导航位置误差向量,δvn为惯性导航速度误差向量;
19、获取卡尔曼滤波的状态向量德连续时间微分方程,将卡尔曼滤波的状态向量分量分别对时间t求导获得位置、速度以及姿态误差微分方程;陀螺和加速度计比例因子误差向量以及零偏误差向量通过一阶高斯马尔可夫过程进行建模,由卡尔曼滤波的状态向量德连续时间微分方程表达式尅得出连续时间下系统噪声向量和矩阵:
20、
21、e[x(t)wt(τ)]=q(t)δ(t-t)
22、式中,和分别为加速度计和陀螺的测量白噪声,和为陀螺与加速度计零偏误差向量以及比例因子误差向量建模的驱动白噪声;使用离散时间卡尔曼滤波的基本方程,离散化后的系统状态方程如下:
23、δxk=φk/k-1δxk-1+wk-1
24、式中:
25、
26、
27、该等效离散系统满足离散型卡尔曼滤波的基本方程要求,用于求解gnss/imu组合导航的解算,对于序贯到来的自gnss的纬度lat、经度数据lon和来自imu的x轴、y轴、z轴方向的角速度ωx,ωy,ωz以及车辆的x轴、y轴、z轴方向的加速度ax,ay,az进行滤波处理,并输出本车实时的数据给其它智能网联汽车。
28、进一步地,所述感知方法,包括的具体方法为:
29、使用yolov5实现车辆对周围环境的目标检测,同时,如果车辆的协同感知应用程序被激活,则原始感知信息和处理后的感知信息将会通过v2x通信模块传输给周围的智能网联汽车,实现智能网联汽车的协作感知。
30、进一步地,所述规划方法,包括的具体方法为:
31、首先使用以欧几里得距离为启发式算法的a*算法,根据输入的车辆的起点和终点实现一个最优的全局规划路径。之后在车辆行驶过程中,使用三次样条插值生成车辆平滑的局部规划路径,返回路径点的x、y坐标列表,曲率列表和偏航角列表,在车辆行驶过程中生成平滑的局部路径,交付给控制端,生成刹车、油门、转向等指令。
32、进一步地,所述控制方法,包括的具体方法为:
33、使用模型预测控制(model predictive control,mpc)方法补偿车辆运动过程中可能的干扰,并在在智能网联汽车行驶过程中,采用等车头时距控制模型,根据实时传来的路径规划信息,生成相应的油门、刹车以及转向角度的数值。
34、进一步地,所述v2x通信方法,包括的具体方法为:
35、实时传输车辆当前的状态,本车辆周围的智能网联汽车将根据v2x模块与本车实时通讯,传来的供决策规划模块判断当前时刻应该做出何种决策,并进行车辆之间的协同驾驶。
36、进一步地,所述实现智能网联汽车在系统中的自动驾驶,包括的具体方法为:
37、智能网联汽车通过上述感知、定位、规划、控制、v2x通信模块进行实时自动驾驶,并且虚拟环境与真实环境实时交互,实现在试验场地虚实结合的全套自动驾驶开发测试。
38、本发明的实施例提供了一种基于数字孪生虚实结合的混合交通流测试系统,该系统包括数据配置模块、数据采集模块以及数据分析模块,其中:
39、数据配置模块,用于采集现实试验场场地数据,实现数字孪生虚拟场景的构建,设置真实环境与虚拟环境的交互,实现虚实结合的系统设置;
40、数据采集模块,用于根据系统设置数据集生成不同风格的虚拟人驾车辆,同时真实驾驶员通过驾驶模拟器采集的数据生成不同风格的真实人驾车辆,部分虚拟人驾车辆和部分真实人驾车辆共同组成具有不同驾驶风格的人类驾驶车辆,获取不同人类驾驶车辆的状态和位置信息;
41、数据分析模块,用于根据人类驾驶车辆的状态和位置信息为智能网联汽车设置全套的感知、定位、规划、控制以及v2x通信方法,实现智能网联汽车在系统中的自动驾驶。
42、本发明的技术方案的有益效果是:可以加入实车提高测试过程的真实性,设置智能网联汽车全套的感知、定位、规划、控制、以及v2x模块,并且设置具有不同驾驶员风格的虚拟人驾车辆,同时,还可以将真实驾驶员通过驾驶模拟器驱动的真实人驾车辆导入,能够大幅度降低大量实车实验的成本性及安全性,实现了将真实车辆动力学、混合交通流仿真、以及多种复杂虚拟交通场景的融合,真实性更高。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187926.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表