传感器计数的停车位分区搜索方法与流程
- 国知局
- 2024-07-31 21:11:24
本发明是一种传感器划分定位区与分区统计的空车位搜索方法,用于智慧城市的停车统计与车位检索,属于物联网控制技术。
背景技术:
1、目前市域范围普遍用地紧张,车位不足是一大难题,车主迫切需要预先了解市域范围的停车情况,快速找到空车位。由于停车场不足,目前很多城市依靠街区做路边停车,依靠人力无法顾及大范围的街区车位,不能精准掌握停车实况,乱停车现象严重。
2、现有的停车管理系统采用车牌拍照来确定身份,一般在出入口布置摄像头,通过分析车牌号,实现停车计时与自动管理。车牌拍照也可以做汽车定位,限于镜头视野,要求3~4个车位安装1个摄像头,用于捕捉车牌,这样的系统经济性很差,摄像头供电也很成问题。城市停车范围太大,无法安装如此规模的摄像系统,智慧城市迫切需要新的物联网解决方案,来达到自动停车管理的目标。
3、注意到上述问题,本发明提出一种传感器划分定位区与分区统计的空车位搜索方法,把停车区划分成多个矩形的定位区,并在各定位区的所有车辆出入口安装红外线传感器,每个定位区设定可使用的车位数,车辆进出各定位区时会遮挡红外线束,系统通过线束遮挡的顺序与时间等数据,判断车辆是否进出定位区,并通过统计各定位区的车辆数量,计算各搜索区的空车位,然后把计算结果发到云服务器,实现城市区域的车位检索与智能管理。
技术实现思路
1、城市的常规停车区域分为街区与停车场两类,街区是沿路边停车,占用部分道路停放车辆,停车场是专门建设的停车设施,按照设计规范布置停车位。在这两种停车区里,车辆都是顺序排列,其车位数有一个限值,超出限值的车辆即使进入停车区,也无法找到停放位置,这一限值是本发明的统计基础。
2、基于本地的停车管理,要求边缘算力靠近现场,就近感知与计算,基础数据无须发送云服务器,边缘计算是非常合适的应用技术,车辆进出数据通过传感器生成,由边缘算力形成计算结果,然后把计算结果发送到云服务器,流程简洁,安全合理。边缘计算可以充分利用边缘节点(手机、路由器或边缘计算机)就近处理,形成协同效应,大大提高数据处理效率。
3、按照上述原理,本发明的技术目的是这样实现的:
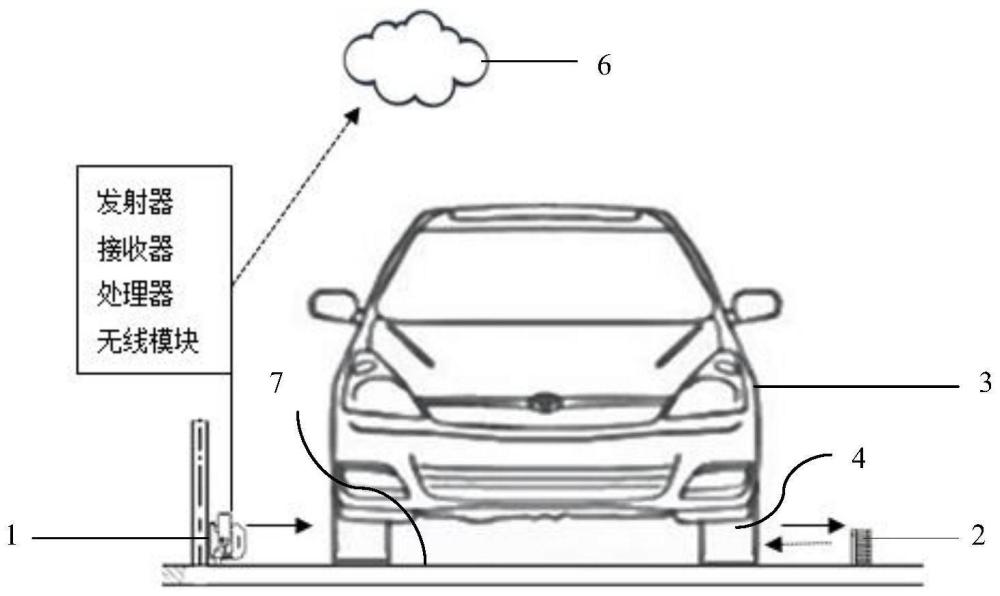
4、首先,把停车区划为若干个矩形的定位区,每个定位区包含3~15个车位,这些定位区均匀分布,确保对整个停车区的覆盖。在各定位区的所有出入口分别安装红外线传感器,每个定位区都有专属的传感器,传感器由主机与反射器组成,在车道两侧分开安装,间距为1~4个车道的宽度,主机发射红外线束,反射器将线束按照原角度反射回去,每组传感器至少形成2个平行的红外线束。主机集成发射器、接收器、处理器及无线模块,发射器用于发射红外线束,接收器感知反射回来的线束,由此形成探测用的平行线束,处理器依据接收器感知的线束遮挡的顺序与时间等数据,计算并确认车辆是否进出定位区,统计定位区内的实时车辆数量,无线模块将计算结果发送云服务器。传感器在靠近地面的位置安装,红外线束的高度不高于车轮,即只有车轮能够遮挡线束,车身不会遮挡线束。
5、进一步,传感器划分出所述的多个定位区,由于各定位区互相拼接,车辆只能在逐一通过各定位区。汽车进入某个定位区,前车轮首先遮挡红外线束,由于至少有2个平行线束,从线束遮挡的顺序与时间差,可以判断前车轮是否进入该定位区,接着后车轮遮挡红外线束,按照同样方式判断后车轮是否进入该定位区,该区传感器计算出前后两个车轮都进入本区后,给该区计正数一次,汽车继续行驶,通过这个定位区进入下个定位区,下个定位区的传感器依据上述计算模式,计算出汽车进入下区,给下区计正数一次,同时上区传感器计负数一次,两个定位区的统计数n同时增减。汽车逐一穿越多个定位区,最终在一个定位区停下来,最后那个定位区就是汽车的停放位置。
6、传感器的红外线束只会被车轮遮挡,车身对线束没有影响,对每个汽车都能够依次探测到两次的车轮遮挡数据,确保各定位区能够准确统计车辆进出。车轮宽度是固定的,对红外线束的遮挡顺序与时间具有特定的数据特征,与行人、动物或自行车的数据特征差别较大,很容易在计算中鉴别。汽车进入或离开某个定位区,车轮遮挡红外线束的顺序是相反的,系统能够准确识别汽车的进出状态。
7、进一步,所述的每个定位区的车位数是固定的,各定位区的传感器都预先设定好车位数,如果某个定位区的统计数n小于车位数,说明该区有空余车位,空余数为两者差值。如果统计数n大于或等于车位数,说明该区已经停满了。传感器会把计算结果发送到云服务器,显示在市政管理平台上,用户调用服务器数据,实时获取所有停车区的空余车位数,具体位置精确到3~15个车位的定位区。
8、上述流程要求每个定位区的所有出入口分别安装传感器,各定位区的传感器是专属的,按分区独立计算,确保准确统计每个区的车辆进出数量。每个定位区的车位数在3~15个之间,数量比较合理,位置相对集中,用户按照查询结果,开车到定位区能够快速找到空车位。
9、进一步,停车区建立所述的定位区后,为计算停车时间,在停车区的总进出口设置摄像机,抓拍车辆进入与离开时的车牌号,计算出某个车牌在停车区的停留时间,为自动扣费建立账本。
10、由此,本发明构筑了一个实时、可靠的车位搜索与自动计时的管理平台,能够随时查询城市中的停车区哪里有空余车位,并动态记录停车时间,为车主提供找车与找车位服务,为市政部门完成停车管理和自助收费,有效提升智慧城市的管理水平。
11、有益效果
12、本发明把街区与停车场划分成多个矩形的定位区,在各定位区的所有出入口分别安装红外线传感器,每个定位区设定可使用的车位数,传感器通过红外线束遮挡的顺序与时间等数据,判断车辆是否进出定位区,统计进出各定位区的汽车数量,通过车位数与统计数的正负差额来判断各定位区的空余车位数,并将计算结果发送云服务器,用户访问云服务器,快速找到有空车位的定位区。本发明是边缘计算的创新应用,既能实时显示空车位分布,又为市政部门提供管理平台,网络规模适中,硬件简单实用,是低成本的智慧城市应用系统。
技术特征:1.一种传感器划分定位区与分区统计的空车位搜索方法,把停车区划为若干个矩形的定位区,在各定位区的所有出入口分别安装传感器,其特征是:
2.根据权利要求1所述的空车位搜索方法,其特征是在停车区的总进出口设置摄像机,抓拍车辆进入与离开时的车牌号,计算出某个车牌在停车区的停留时间,为自动扣费建立账本。
3.根据权利要求1所述的空车位搜索方法,其特征是主机集成发射器、接收器、处理器及无线模块,发射器用于发射红外线束,接收器感知反射回来的线束,由此形成探测用的平行线束,处理器依据接收器感知的线束遮挡的顺序与时间等数据,计算并确认车辆是否进出定位区,统计定位区内的实时车辆数量,无线模块将计算结果发送云服务器。
4.根据权利要求1所述的空车位搜索方法,其特征是每个定位区的车位数在3~15个之间,停车位相对集中,用户按照查询结果,开车到定位区能够快速找到空车位。
5.根据权利要求1所述的空车位搜索方法,其特征是主机与反射器都在靠近地面的位置安装,红外线束的高度不高于车轮,即只有车轮能够遮挡线束,车身不会遮挡线束。
6.根据权利要求1所述的空车位搜索方法,其特征是汽车进入或离开定位区,车轮遮挡红外线束的顺序是相反的,系统能够准确识别汽车的进出状态。
7.根据权利要求1所述的空车位搜索方法,其特征是计算结果发送云服务器后,用户访问云服务器,获取停车区的空余车位分布图。
8.根据权利要求1所述的空车位搜索方法,其特征是每个定位区的所有出入口分别安装传感器,各定位区的传感器是专属的,按分区独立计算,确保准确统计每个区的车辆进出数量。
9.根据权利要求1所述的空车位搜索方法,其特征是系统工作中不断有车辆进出,各定位区的统计数n不断增减,统计数n与各区设定车位数的差值也不断增减。
技术总结本发明是一种传感器划分定位区与分区统计的空车位搜索方法,用于智慧城市的停车统计与车位检索,本发明把街区与停车场划分成多个矩形的定位区,在各定位区的所有出入口分别安装红外线传感器,每个定位区设定可使用的车位数,传感器通过红外线束遮挡的顺序与时间等数据,判断车辆是否进出定位区,统计进出各定位区的汽车数量,通过车位数与统计数的正负差额来判断各定位区的空余车位数,并将计算结果发送云服务器,用户访问云服务器,快速找到有空车位的定位区。本发明是边缘计算的创新应用,既能实时显示空车位分布,又为市政部门提供管理平台,是低成本的智慧城市应用系统。技术研发人员:尹梦寒,王代彬,徐君龙受保护的技术使用者:上海吾城微脑数字技术有限公司技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240731/188773.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。