一种现实路网场景下的数字孪生辅助多交通信号灯智能调配方法、系统、装置及存储介质
- 国知局
- 2024-07-31 21:20:11
本发明涉及多交通信号灯自适应配时领域,具体涉及一种现实路网场景下的数字孪生辅助多交通信号灯智能调配方法、系统、装置及存储介质。
背景技术:
1、为提升交通通行效率,对交通信号灯的智能控制便成为了城市交通管理中至关重要的组成部分。传统的交通信号灯配时是基于固定的时间间隔来控制交通流量,这种方法由于策略的固定。因此无法有效地应对交通需求的变化。同时路网中随时会出现各类交通状况例如早晚高峰,车辆分布不均匀等事件进一步的提高了疏通的难度。交通信号灯自适应配时本质上适合于城市交通的动态规划,其目的是通过应用先进的技术和算法,使交通信号灯能够根据实时交通情况进行自主调整,以最大程度地提高交通效率和道路通行能力。自适应配时研究中主流的方向是利用强化学习来训练模型,进而利用模型来对交通信号灯的亮灯状态即相位作以控制来最大化的提高车辆的通行效率。
2、但事实上当前针对交通信号灯的强化学习模型由于路网中的车辆的分布情况情况千变万化,由于前一步的不同决策会导致后一步出现不同的路网情况,这导致单个强化学习模型泛化性不强,完全训练完毕一个模型代价极大,这不可避免的导致了交通信号灯自适应配时模型容易出现错误决策的问题。因此这便需要以智慧交通系统its为实体路网中信息收集的来源,搭建出等比的数字孪生系统来缓解这个缺陷。然而基于its的数字孪生系统是一个大型的交通数字孪生系统,其生成与运行需要平稳而有效率的数据流传输,这一直是数字孪生系统搭建研究中的一个问题,因为这会直接影响到系统的准确性和实用性,同时不精确的交通数据流将会进一步的诱使模型产生错误的决策,道路中存在着许多不具有联网能力而缺乏定位的车辆,它们的存在会导致道路中交通数据的精确性明显下降。
技术实现思路
1、本发明目的在于解决大型交通数字孪生系统中由于数据传输方式固定导致的传输低效,道路中由于非联网车辆大量存在而导致的交通流数据严重失真,交通路网中由于单个信号灯配时模型决策错误所导致的道路拥堵这三个问题。本发明提出了用数字孪生辅助的信号灯自适应配时方案优化机制—adaptive control of signal lights bydigital twin(acsl-dt),同时生成多个克隆场景并在经过预测的交通数据流下使用不同的强化学习模型进行实验进而验证各个方案的优劣,大幅提高生成正确配时策略的可能性。同时针对数字孪生系统的数据传递,使用一种矩阵数据处理方法实现海量数据的轻便传输,并用每辆自动驾驶车辆实现对道路中所有车辆的定位进而形成真实交通流的数据预测。
2、本发明解决其技术问题所采用的方案如下:第一方面,本发明提供了一种现实路网场景下数字孪生辅助的多交通信号灯智能调配方法,该方法包括如下步骤:
3、(1)获取现实路网中描述物体形状的关键点位,根据关键点位搭建数字映射体,生成多个当前现实路况的克隆场景;
4、(2)利用差分矩阵的方式进行数据传输,驱动数字映射体运动,并以不同时隙重复元素为基点对矩阵数据降维聚合进行数据压缩;
5、(3)以智能车辆实时探测信息为基点,并进行数据共享,不断更新实现非联网车辆的相对定位,统计真实道路交通数据;
6、(4)给定时间间隔,让各交通信号灯强化学习算法配时模型在规定时间间隔内进行前瞻性实验去获取多个未来结果,择优选择策略反馈回现实,实现交通信号灯智能调配效率的最大化。
7、进一步地,步骤(1)中,根据关键点位搭建数字映射体,具体包括如下步骤:
8、(1.1)初始化一个边长为1的正方形数字模型材料,该材料能够自定义伸缩及放置在正确位置,进入步骤(1.2);
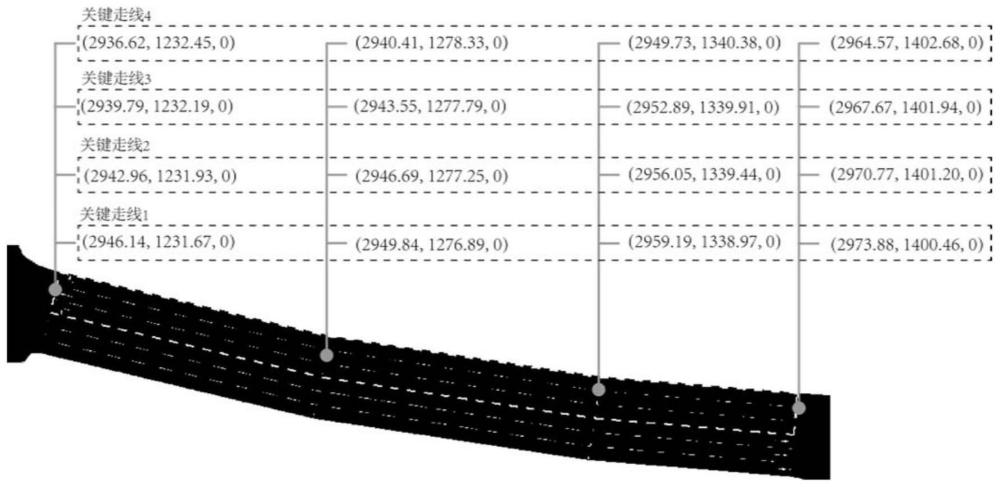
9、(1.2)对现实物体自下而上获取多条关键走线用于垂直切割物体并分别描述物体对应形状,确保被切割后每一物体各自的走线关键点位数相同,获取走线中的相邻两个关键拐点坐标,以及相邻的物体的对应走线中相邻两个关键拐点坐标,由此得到四个拐点所包围四边形中心坐标,此时将正方形数字模型材料中心点放置于该四边形中心坐标,进入步骤(1.3);
10、(1.3)求取四边形的对角线长度,并以此为依据对正方形数字模型材料进行伸缩变为合适的形状,进入步骤(1.4);
11、(1.4)确定两条对角线的夹角,以及确定由两条对角线相交所对应的两条线各自长度,通过求取两条线段向量的模获得对应线段的长度,进一步获得另外两条线段的长度,完成正方形数字模型材料的正确放缩后进入步骤(1.5);
12、(1.5)获取材料放置所需角度,所需角度包括对于水平面,侧平面与前平面的倾斜角度,选择其中一个关键拐点与四边形中心坐标所连结的直线来确定角度实现整个平面的正确放置,通过直线方向向量进一步获取与三个面所对应角度,完成正方形数字模型材料的放置,进入步骤(1.6);
13、(1.6)重复以上步骤将所有由四个关键拐点所包围的四边形区域使用正方形数字模型材料生成并编组成为一部分切割物体,并将所有切割物体整合变为最终数字映射体。
14、进一步地,步骤(2)中,对矩阵数据降维聚合包括如下步骤:
15、(2.1)初始化交通流通数据矩阵,具体如下:
16、
17、数据矩阵中每一行均包含车辆的编号carn,在道路中笛卡尔坐标速度speedn以及角速度anglen数据,判断是否为第一次传输,若是,则完全传输,若不是,进入步骤(2.2)
18、(2.2)与前一次传输的矩阵数据进行对比,剔除重复的数据,并生成差分矩阵,差分矩阵中第三列为发生变化的数据,第一列和第二列为相同行内第三列中数据在交通流通数据矩阵中的对应位置描述,进入步骤(2.3);
19、(2.3)针对差分矩阵,合并具有相同行数特征的元素,并转化为不定长矩阵,不定长矩阵中每一行第一列数据代表发生变化的数据在原始交通流通数据矩阵对应行数,每一行剩余数据对半的前一部分代表发生变化的数据在原始交通流通数据矩阵中对应列数,对半的后一部分代表更新数据,进入步骤(2.4);
20、(2.4)基于不定长矩阵数据与前一次传输交通流通数据矩阵进行比对,更新发生改变的数据,进入步骤(2.5);
21、(2.5)根据矩阵数据驱动数字映射体运动,返回步骤(2.2)。
22、进一步地,步骤(3)中,进行数据共享,不断更新实现非联网车辆的相对定位,统计真实道路交通数据,具体包括如下步骤:
23、(3.1)初始化并获取道路r中智能车辆ici并形成集合ic,进入步骤(3.2);
24、(3.2)初始化智能车辆局部感知信息集合d,超越ici车辆集合ex,被ici超越车辆集合sp,进入步骤(3.3);
25、(3.3)更新智能车辆集合,以车辆位置对ic从前往后进行排序,进入步骤(3.4);
26、(3.4)对于每一辆智能车辆ici,智能车辆ici记录当前其局部感知范围内的车辆进入步骤(3.5);
27、(3.5)ici记录超过其自身的车辆集合ici记录其自身超过的车辆集合进入步骤(3.6);
28、(3.6)遍历智能车辆信息,更新感知信息集合,局部感知信息集合d获取所有智能车辆处于其局部感知内的车辆信息进入步骤(3.7);
29、(3.7)超越ici车辆集合ex获取所有智能车辆所记录的被超车车辆信息被ici超越车辆集合sp获取所有智能车辆所记录的超车车辆信息进入步骤(3.8);
30、(3.8)局部感知车辆集合d对探测目标进行去重,进入步骤(3.9);
31、(3.9)超越ici车辆集合ex根据智能车辆集合ic顺序从前往后进行目标去重,超越车辆集合sp根据ic顺序从后往前对探测目标进行去重,进入步骤(3.10);
32、(3.10)根据ici位置生成动态车辆间隔集合s,用于统计前后相邻两辆智能车辆之间的非联网车辆目标集合初始化该集合进入步骤(3.11);
33、(3.11)同时遍历ex与sp中探测车辆目标元素与提取与中相同元素并将值赋予即进入步骤(3.12);
34、(3.12)清除中存在的智能车辆目标ici,初始化sfirst并赋予最前方目标车辆集合元素即初始化send并赋予最前方目标车辆集合元素即进入步骤(3.13);
35、(3.13)统计道路r中智能车辆总数为集合的元素个数为集合的元素个数为集合sfirst的元素个数为集合send的元素个数为则道路r中真实的车辆总数sumr计算公式如下:
36、
37、进一步地,步骤(4)所述的规定时间间隔内进行前瞻性实验,具体在于通过交通流通数据矩阵获取到智能车辆的行驶路线,并与数字孪生系统内的交通信号灯数字映射体进行交互实现通行与停驻;进一步通过交通信号灯强化学习算法配时模型控制交通信号灯数字映射体亮灯状态来进行实验。
38、进一步地,步骤(4)中,获取多个未来结果,择优选择策略反馈回现实,实现交通信号灯智能调配效率的最大化的具体包括如下步骤:
39、(4.1)初始化交通信号灯集合n,初始化交通信号灯强化学习算法配时模型输入数据空间obs,进入步骤(4.2);
40、(4.2)获取现实时间step时的信号灯相位动作集合p,道路集合e,各道路车辆密度道路车辆队列长度进入步骤(4.3);
41、(4.3)在交通信号灯集合n中遍历每一个信号灯ni,获取其相邻接道路的道路车辆密度道路车辆等待队列长度结合信号灯编号ni及在step时的相位动作逐行加入数据空间obs即完成针对交通信号灯强化学习算法配时模型输入的准备,进入步骤(4.4);
42、(4.4)以当前step为起点,对于多个克隆场景其集合如下:
43、
44、在h个克隆场景中加入不同的交通信号灯强化学习算法配时模型并且每个配时模型将各自生成策略,进入步骤(4.5);
45、(4.5)克隆场景中对应配时模型方案在时隙θ下进行测试,并各自生成结果指标分别代表经过θ时间以后在各克隆场景中经过不同交通信号灯强化学习算法配时模型的调配下全局的车辆数量,平均车辆等待时间,平均速度以及平局队列长度,进入步骤(4.6);
46、(4.6)生成评价指标用于评价每一个克隆场景中策略的优劣,其公式如下:
47、
48、实验指标为参数集合ρα与全局停驻车辆数量、车辆平均等待时间,平均队列长度及平均速度集合的内积,其ρα集合如下:
49、ρα=<λ1,λ2,λ3,λ4>,
50、其中,λ1,λ2,λ3,λ4分别表示为全局停驻车辆数量、车辆平均等待时间,平均队列长度及平均速度的权重,使用参数集合ρα调整最终方案选择中的各要素考虑比重最终获取到评价指标,进入步骤(4.7);
51、(4.7)使用rustep选取评价指标值最大的实验场景中所对应的策略,并在现实场景中加以应用,其公式如下:
52、
53、销毁各克隆场景,现实使用最终方案进行信号灯调控,并重新进入步骤(4.1)重置obs开始下一时隙仿真。
54、第二方面,本发明还提供了一种现实路网场景下数字孪生辅助的多交通信号灯智能调配系统,该系统包括数字映射体搭建模块、数据传输模块、交通数据统计模块和智能调配模块;
55、所述数字映射体搭建模块用于获取现实路网中描述物体形状的关键点位,根据关键点位搭建数字映射体,生成多个当前现实路况的克隆场景;
56、所述数据传输模块用于利用差分矩阵的方式进行数据传输,驱动数字映射体运动,并以不同时隙重复元素为基点对矩阵数据降维聚合进行数据压缩;
57、所述交通数据统计模块用于以智能车辆实时探测信息为基点,并进行数据共享,不断更新实现非联网车辆的相对定位,统计真实道路交通数据;
58、所述智能调配模块用于给定时间间隔,让各交通信号灯强化学习算法配时模型在规定时间间隔内进行前瞻性实验去获取多个未来结果,择优选择策略反馈回现实,实现交通信号灯智能调配效率的最大化。
59、第三方面,本发明还提供了一种现实路网场景下数字孪生辅助的多交通信号灯智能调配装置,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述处理器执行所述可执行代码时,实现所述的一种现实路网场景下数字孪生辅助的多交通信号灯智能调配方法。
60、第四方面,本发明还提供了一种计算机可读存储介质,其上存储有程序,所述程序被处理器执行时,实现所述的一种现实路网场景下数字孪生辅助的多交通信号灯智能调配方法。
61、第五方面,本发明还提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时,实现所述的一种现实路网场景下数字孪生辅助的多交通信号灯智能调配方法
62、本发明的有益成果:
63、(1)本发明利用道路探测设备采集交通路网数据并利用物体模型关键点位生成高保证数字映射体促进生成数字孪生系统,同时基于差分矩阵的数据优化机制来降低其数据传输中的开销,保障数据传输的效率。
64、(2)本发明提出一种交通流统计机制来进一步精确交通数据流,这能够为交通决策提供关键性数据支撑。
65、(3)本发明是在数字孪生中实现交通信号灯自适应调配的开创性工作,在优化路网信号灯调配同时能够预防错误决策在现实中的应用。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189310.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表