一种道路行人位置与个人信息同步感知方法
- 国知局
- 2024-07-31 21:27:52
本发明涉及智能交通系统,具体地说,是一种道路行人位置与个人信息同步感知方法。
背景技术:
1、随着智能交通系统的快速发展,道路行人的位置感知和个人信息获取变得越来越重要。现有的行人感知方法主要依赖于单一的传感器或技术,如gps定位、视频监控、激光雷达点云识别等,这些方法在精度、实时性和全面性方面存在不足。
2、具体而言,行人携带的智能手环、智能手表或智能手机等智能设备可以发送包含设备标识的gps位置数据,通过设备标识可以进一步确定行人的身份和详细个人信息,但是此位置数据精度较差,不足以支持智能交通系统的分析与决策过程。另一方面,双目视觉相机、激光雷达和毫米波雷达等传感器可以获取行人的高精度位置,但是无法获取行人的详细个人信息。因此,开发一种能够同时提供高精度位置信息和详细属性信息的行人感知方法具有重要的现实意义和应用前景。
技术实现思路
1、为了克服上述现有技术的不足,本发明提供了一种道路行人高精度位置与属性信息同步感知方法,该方法结合了双目视觉相机和行人携带的智能设备内置传感器,通过数据融合技术实现对行人高精度位置信息和详细属性信息的同步感知。为实现上述目的,本发明采取以下技术方案:
2、一种道路行人高精度位置与属性信息同步感知方法,包括以下步骤:
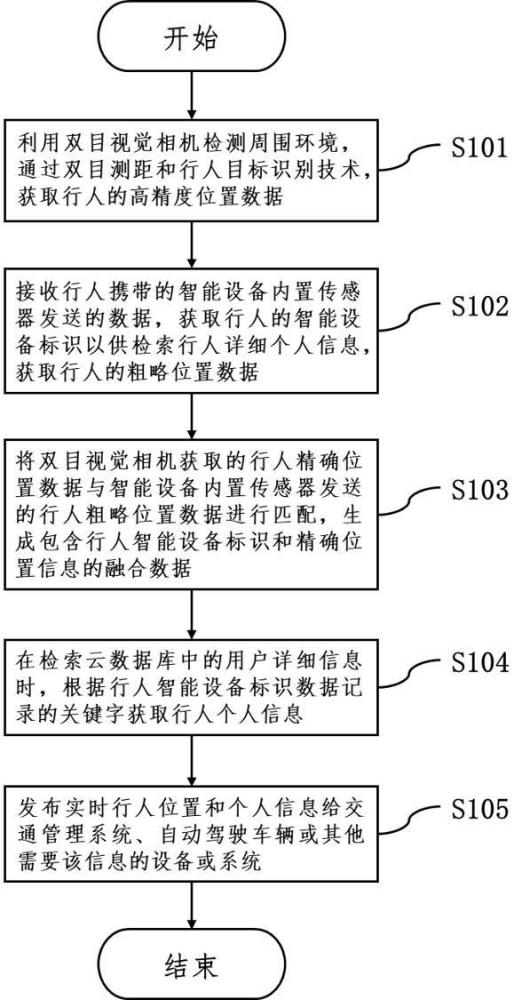
3、利用双目视觉相机检测周围环境,通过双目测距和行人目标识别技术,获取行人的高精度位置信息。具体而言,双目视觉相机采集图像后,利用深度学习算法对图像进行目标检测,识别出行人目标,并通过立体匹配算法获取行人的三维位置信息{x0, y0, z0}。考虑到城市地面一般平坦,且行人离开地面的可能性不大,保留平面位置信息{x0, y0}即可。
4、接收行人携带的智能设备内置传感器发送的数据,该数据包括但不限于行人的智能设备标识{deviceid}、纬度{latitude}、经度{longitude}、纬度数据方差{d(x)}、经度数据方差{d(y)}和纬度经度位置数据协方差{cov(x,y),cov(y,x)}。接下来将纬度、经度数据转换为平面位置信息{x1, y1}。
5、通过数据融合技术,将双目视觉相机获取的行人高精度位置信息与智能设备内置传感器发送的行人粗略位置信息进行同步匹配融合,生成行人携带的智能设备标识和高精度位置信息。传感器数据融合采用对二元高斯分布的概率密度函数进行积分计算的方式,以获得行人处于特定位置的概率。
6、利用行人智能设备的标识信息查询行人详细属性信息。这些属性信息包括但不限于行人的年龄、身份信息、健康数据、交通违章记录等,可以通过行人智能设备的设备标识查询云端数据库的行人属性信息表获取。
7、发布道路行人高精度位置和属性信息。这些信息可以通过无线通信网络发布给交通管理系统、自动驾驶车辆或其他需要该信息的设备或系统,为智能交通系统的决策提供数据支持。
8、本发明的有益效果是:
9、通过结合双目视觉相机和智能设备内置传感器,实现了对行人高精度位置信息和详细属性信息的同步感知,提高了感知的准确性和全面性。
10、采用了数据融合技术,将多源位置信息进行融合处理,提高了位置信息的准确性和稳定性。
11、提供了丰富的行人属性信息,为智能交通系统的决策提供了更多的数据支持。
技术特征:1.一种道路行人位置与个人信息同步感知方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的道路行人位置与个人信息同步感知方法,其特征在于:所述的双目测距和行人目标识别技术包括利用深度学习算法对双目视觉相机采集的图像进行目标检测,并通过立体匹配算法计算行人的三维位置信息。
3.根据权利要求1或2所述的道路行人位置与个人信息同步感知方法,其特征在于:所述的行人智能设备内置传感器包括gps定位模块、加速度传感器和陀螺仪,用于提供行人的设备标识、粗略位置、加速度和移动方向信息。
4.根据权利要求1至3中任一项所述的道路行人位置与个人信息同步感知方法,其特征在于:所述的数据融合技术采用对二维正态分布的概率密度函数进行积分计算的方式,对双目视觉相机获取的行人精确位置信息与智能设备内置传感器发送的行人粗略位置信息进行同步匹配融合。
5.根据任一上述权利要求所述的道路行人位置与个人信息同步感知方法,其特征在于:所述的行人个人信息包括但不限于行人的年龄、身份信息、健康数据、交通违章记录等,该信息通过唯一性的行人智能设备标识查询云端数据库获取。
6.根据任一上述权利要求所述的道路行人位置与个人信息同步感知方法,其特征在于:所述的道路行人位置和个人信息通过无线通信网络发布给交通管理系统、自动驾驶车辆或其他需要该信息的设备或系统。
7.根据任一上述权利要求所述的道路行人位置与个人信息同步感知方法,其特征在于:包括一个反馈机制,用于接收设备或系统对发布的道路行人位置和个人信息准确程度的反馈,并根据反馈调整感知方法的参数或算法,以提高感知的准确性和效率。
技术总结本发明提供了一种道路行人位置与个人信息同步感知方法,旨在提高智能交通系统中对行人位置感知的精度和全面性。该方法通过结合双目视觉相机和行人携带的智能设备内置传感器,实现了对行人位置信息和详细个人信息的同步获取。具体而言,首先利用双目视觉相机通过双目测距和行人目标识别技术获取行人的高精度位置信息;然后接收智能设备内置传感器发送的行人粗略位置、加速度和移动方向等数据;接着通过数据融合技术将两种来源的位置信息进行同步匹配融合,生成行人携带的智能设备标识和高精度位置信息;进一步地,利用行人智能设备的标识信息查询行人详细个人信息;最后将道路行人位置和个人信息发布给交通管理系统、自动驾驶车辆等需要该信息的设备或系统。本发明不仅提高了行人位置感知的精度,还提供了丰富的行人个人信息,为智能交通系统的决策提供有力支持。技术研发人员:周正书,龙潜,马晓晴,宁璐,支强,王改华受保护的技术使用者:天津科技大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240731/189637.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表