一种智能网联汽车自动驾驶保障责任的判定方法、装置、设备及可读存储介质与流程
- 国知局
- 2024-07-31 21:32:07
本发明涉及车辆保险领域,尤其涉及一种智能网联汽车自动驾驶保障责任的判定方法、装置、设备及可读存储介质。
背景技术:
1、智能网联汽车通过车联网与智能车的有机联合,表现在搭载车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,以实现车与人、路、后台等智能信息交换共享。智能网联汽车搭载的自动驾驶功能可以辅助驾驶人或自主完成部分驾驶任务,极大提升了驾驶的便捷性及舒适性,已成为全球汽车产业转型升级的重点方向。
2、随着智能驾驶车辆快速上升、l2+级别自动驾驶订阅服务的大众化,自动驾驶事故不可避免会发生,但鲜有自动化、标准化的自动驾驶事故责任认定方法,导致自动驾驶相关事故后处置工作难以开展。同时,由于自动驾驶功能涉及环节复杂,关联驾驶人、自动驾驶系统、汽车企业等多个事故责任主体,因此需要明确一套标准化、自动化、可信的自动驾驶事故责任认定方法,提升自动驾驶事故责任认定效率,保障驾驶人、车企、自动驾驶功能供应商的权益。
3、同时,现有相关文献通过满足自动驾驶设定条件、ads是否故障、是否人为干预车辆等环节进行事故责任判定。但在实际的操作过程中,针对自动驾驶设定条件不同车企缺少统一的自动驾驶设定条件字段开展后续定责,需要根据实际车辆运行参数进行综合判定。另一方面,现有判别方案缺少对于人机交互、事故前驾驶人状态、用户-系统操作一致性等关键参数的分析,使得部分场景的事故责任判别不清甚至责任归属错误。
技术实现思路
1、针对现有技术的上述问题,本发明提出了一种智能网联汽车自动驾驶保障责任的判定方法、装置、设备及可读存储介质,构建自动驾驶保障责任的判定模型,保障驾驶人、车企、自动驾驶功能供应商的合法权益,以促进智能网联汽车行业的可持续发展。
2、具体地,本发明提出了一种智能网联汽车自动驾驶保障责任的判定方法,包括步骤:
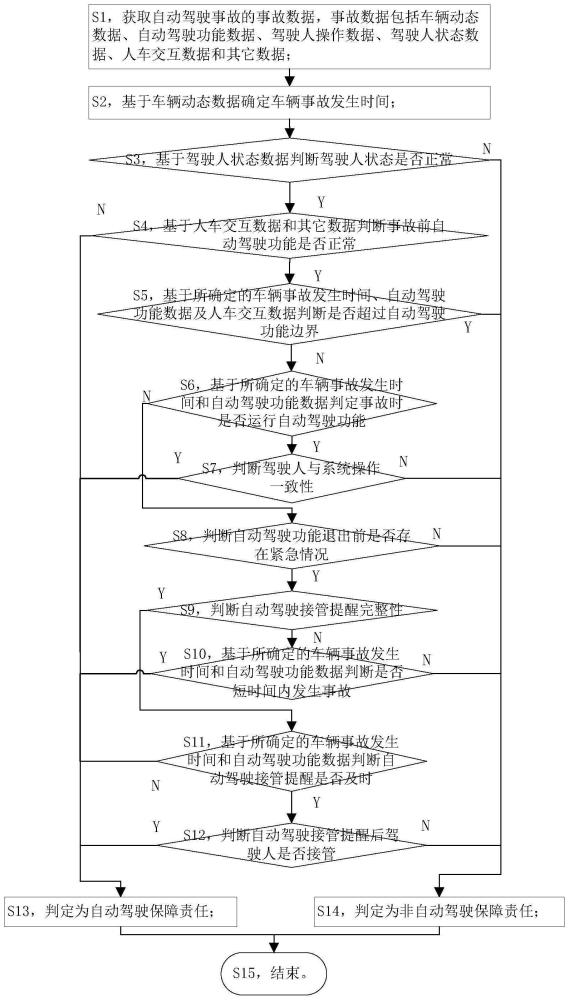
3、s1,获取自动驾驶事故的事故数据,所述事故数据包括车辆动态数据、自动驾驶功能数据、驾驶人操作数据、驾驶人状态数据、人车交互数据和其它数据;
4、s2,基于所述车辆动态数据确定车辆事故发生时间;
5、s3,基于所述驾驶人状态数据判断驾驶人状态是否正常,若正常,则进入步骤s4,若异常,则进入步骤s14;
6、s4,基于所述人车交互数据和其它数据判断事故前自动驾驶功能是否正常,若正常,则进入步骤s5,若异常,则进入步骤s13;
7、s5,基于所确定的车辆事故发生时间、自动驾驶功能数据及人车交互数据判断是否超过自动驾驶功能边界,若未超过,则进入步骤s6,若超过,则进入步骤s14;
8、s6,基于所确定的车辆事故发生时间和自动驾驶功能数据判定事故时是否运行自动驾驶功能,若是,则进入步骤s7;若否,则进入步骤s8;
9、s7,判断驾驶人与系统操作一致性,若一致,则进入步骤s13,若不一致,则进入步骤s14;
10、s8,判断自动驾驶功能退出前是否存在紧急情况,若不存在,则进入步骤s14;若存在,则进入步骤s9;
11、s9,判断自动驾驶接管提醒完整性,若不完整,则进入步骤s10,若完整,则进入步骤s11;
12、s10,基于所确定的车辆事故发生时间和自动驾驶功能数据判断是否短时间内发生事故,若是,则进入步骤s13,若否,则进入步骤s14;
13、s11,基于所确定的车辆事故发生时间和自动驾驶功能数据判断自动驾驶接管提醒是否及时,若否,则进入步骤s13,若是,则进入步骤s12;
14、s12,判断自动驾驶接管提醒后驾驶人是否接管,若是,则进入步骤s13,若否,则进入步骤s14;
15、s13,判定为自动驾驶保障责任,转入步骤s15;
16、s14,判定为非自动驾驶保障责任,转入步骤s15;
17、s15,结束。
18、根据本发明的一个实施例,在步骤s2,提取所述车辆动态数据中的纵向加速度绝对值最大且为负值的时间点为t1,车辆横向加速度首次为0的时间点为t2,选取两者中更早发生的时间点为事故发生时间t。
19、根据本发明的一个实施例,步骤s3包括:
20、s31,判断是否出现疲劳立即接管信息,若否,则进入步骤s32,若是,则进入步骤s14;
21、s32,判断是否出现脱手立即接管信息,若否,则进入步骤s33,若是,则进入步骤s14;
22、s33,判断是否出现分心立即接管信息,若否,则进入步骤s34,若是,则进入步骤s14;
23、s34,判断是否出现打电话立即接管信息,若否,则进入步骤s35,若是,则进入步骤s14;
24、s35,判断是否出现安全带解开信息,若否,则进入步骤s36,若是,则进入步骤s14;
25、s36,判断是否出现四门两盖开启信息,若否,则进入步骤s4,若是,则进入步骤s14。
26、根据本发明的一个实施例,步骤s4包括步骤:
27、s41,判断在事故前是否出现安全报警,若是,则进入步骤s42,若否,则进入步骤s13;
28、s42,判断在事故前是否出现第三者信号,若否,则进入步骤s5,若是,则进入步骤s13。
29、根据本发明的一个实施例,所述安全报警包括车道偏离预警、前向碰撞预警、方向盘震动提醒,以及自动驾驶功能预警。
30、根据本发明的一个实施例,在步骤s5中,基于所确定的车辆事故发生时间t、事故数据内首次接管请求时间t3、事故数据内自动驾驶功能退出时间t4综合判断事故发生是否超出自动驾驶功能边界;
31、其中,当自动驾驶功能数据出现需要立即接管的第一设定条件,则判断系统发出接管请求,获取事故数据内接管请求对应时间集合{t请求},并选取{t请求}内事故数据内首条数据作为首次接管请求时间t3;若系统未发出接管请求,则首次接管请求时间t3取值为na;
32、当自动驾驶功能数据的功能状态信号符合第二设定条件,则判断为自动驾驶功能状态退出,获取事故数据内自动驾驶功能退出对应时间集合{t退出},并选取{t退出}内事故数据内事故发生时间t前的最后数据作为自动驾驶功能退出时间t4;若事故数据内自动驾驶功能未退出,则自动驾驶功能退出时间t4取值为na;
33、当首次接管请求时间t3或自动驾驶功能退出时间t4在事故发生时间t前s秒内发生,则进入步骤s14;否则,进入步骤s6。
34、根据本发明的一个实施例,在步骤s6,提取车辆事故发生时间t时的自动驾驶功能数据,若其中的自动驾驶功能状态为运行,则认为事故时自动驾驶功能正常运行;若其中的自动驾驶功能状态为挂起或关闭,则认为事故时自动驾驶功能关闭。
35、根据本发明的一个实施例,在步骤s7,判断驾驶人与系统操作一致性包括步骤:
36、s71,基于所述自动驾驶功能数据和驾驶人操作数据判断驾驶人操作与系统请求是否一致,若是,则进入步骤s13,若否,则进入步骤s72;
37、s72,判断事故前是否出现不一致提醒,若是,则进入步骤s14,若否,则进入步骤s13。
38、根据本发明的一个实施例,在步骤s8中,若在自动驾驶功能退出前车道偏离预警、前向碰撞预警、方向盘震动提醒、自动驾驶功能预警存在有轻微报警或严重报警信号,则判断为自动驾驶功能退出前有紧急情况;若在自动驾驶功能退出前车道偏离预警、前向碰撞预警、方向盘震动提醒、自动驾驶功能预警保持正常信号,则判断为自动驾驶功能退出前未有紧急情况。
39、根据本发明的一个实施例,在步骤s9中,若在事故前自动驾驶功能预警存在有严重报警、立即接管信号,则判断为自动驾驶接管提醒完整;若在事故前自动驾驶功能预警保持正常或轻微报警信号,则判断为自动驾驶接管提醒不完整。
40、根据本发明的一个实施例,在步骤s10中,若当事故发生时间t与自动驾驶功能退出时间t4的差值小于等于给定时间,则判断为主动接管后短时间内发生事故;当事故发生时间t与自动驾驶功能退出时间t4的差值大于给定时间,则判断为主动接管后短时间内未发生事故。
41、根据本发明的一个实施例,在步骤s11中,若在事故发生t的给定时间段之前,自动驾驶功能预警存在有正常或轻微报警至严重情况、立即接管信号跳变,则判断为自动驾驶接管提醒及时,进入步骤s12;若事故发生t的给定时间段之前,自动驾驶功能预警不存在有正常或轻微报警至严重情况、立即接管信号跳变,则判断为自动驾驶接管提醒不及时,进入步骤s13。
42、根据本发明的一个实施例,步骤s12包括:
43、s121,判断是否人为切换档位,若否,则进入步骤s122;若是,则进入步骤s13;
44、s122,判断是否人为踩动刹车,若否,则进入步骤s123;若是,则进入步骤s13;
45、s123,判断是否人为踩动油门,若否,则进入步骤s124;若是,则进入步骤s13;
46、s124,判断是否人为转动方向盘,若否,则进入步骤s14;若是,则进入步骤s13。
47、本发明还提供了一种智能网联汽车自动驾驶保障责任的判定装置,适用于前述的判定方法,所述判定装置包括:
48、获取模块,用于获取自动驾驶事故的事故数据,所述事故数据包括车辆动态数据、自动驾驶功能数据、驾驶人操作数据、驾驶人状态数据、人车交互数据和其它数据;
49、第一计算模块,用于基于所述车辆动态数据确定车辆事故发生时间;
50、第一判断模块,用于基于所述驾驶人状态数据判断驾驶人状态是否正常;
51、第二判断模块,用于基于所述人车交互数据和其它数据判断事故前自动驾驶功能是否正常;
52、第三判断模块,用于基于所确定的车辆事故发生时间、自动驾驶功能数据及人车交互数据判断是否超过自动驾驶功能边界;
53、第四判断模块,用于基于所确定的车辆事故发生时间和自动驾驶功能数据判定事故时是否运行自动驾驶功能;
54、第五判断模块,用于判断驾驶人与系统操作一致性;
55、第六判断模块,用于判断自动驾驶功能退出前是否存在紧急情况;
56、第七判断模块,用于判断自动驾驶接管提醒完整性;
57、第八判断模块,用于基于所确定的车辆事故发生时间和自动驾驶功能数据判断是否短时间内发生事故;
58、第九判断模块,用于基于所确定的车辆事故发生时间和自动驾驶功能数据判断自动驾驶接管提醒是否及时;
59、第十判断模块,用于判断自动驾驶接管提醒后驾驶人是否接管;
60、判定模块,用于判定为自动驾驶保障责任或非自动驾驶保障责任。
61、本发明还提供了一种智能网联汽车自动驾驶保障责任的判定设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现前述任一项所述判定方法的步骤。
62、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现前述任一项所述判定方法的步骤。
63、本发明提供的一种智能网联汽车自动驾驶保障责任的判定方法、装置、设备及可读存储介质,综合应用智能网联汽车事故时车辆运行、人车交互、驾驶人状态等数据,构建自动化、标准化、可信化的自动驾驶功能保障范围责任判定方法,解决自动驾驶车辆事故责任难以判定的问题,保障驾驶人、车企、自动驾驶功能供应商的合法权益,促进智能网联汽车行业的可持续发展。
64、应当理解,本发明以上的一般性描述和以下的详细描述都是示例性和说明性的,并且旨在为如权利要求所述的本发明提供进一步的解释。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189954.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表