一种车辆行驶工况合理性评价方法与流程
- 国知局
- 2024-07-31 21:34:34
本发明属于汽车,尤其涉及一种车辆行驶工况合理性评价方法。
背景技术:
1、目前,车辆行驶工况在构建过程中通常以统计学特征参数作为工况合理性评价指标。通过对比工况和样本数据之间特征参数值的差异,可判断构建的工况能否反映某类型车辆在特定区域行驶的能耗、排放等特点。其中,平均车速、车速分布、加速度分布是构建工况时不可或缺的特征参数;同时,几何平均误差和算术平均误差常用于评价工况和样本数据之间的综合差异。
2、为保证行驶工况的代表性,构建工况时应尽可能充分地选取与能耗或排放等特征密切相关的参数,并采用合适的多指标综合评价方法建立相应的评价体系。现有工况构建相关专利普遍存在工况特征参数选取不合理、参数偏少的问题。
3、如发明专利cn113222385a,该专利以12个特征参数为工况评价指标构建行驶工况,但是缺乏功率和速度分布等和车辆综合能耗高度相关的参数;另外,选取的参数包括最大减速度、最大加速度、最高车速等表征车辆极限特征的参数,而此类参数不能反映样本数据的平均特征,使得构建的工况缺乏综合代表性。
4、除参数选取外,选择合适的多指标综合评价方法也是决定工况代表性的关键因素之一。针对行驶工况多评价指标的特点,相关研究通常采用几何平均法和算术平均法评价行驶工况和样本数据之间的综合偏差。
5、如发明专利cn111008505a将特征参数相对偏差的算数均值作为综合评价指标,然而不同特征参数和车辆能耗之间的相关性存在显著差异,为充分保证工况合理性,有必要根据参数和能耗之间相关性强弱设置不同的权重系数,使相关性较强的参数偏差较小。
6、所以,当前工况合理性评价体系存在两个主要问题:(1)参数选取缺乏充分依据;(2)评价方法未充分考虑不同参数和能耗的相关性强弱。
技术实现思路
1、为解决上述技术问题,本发明提供了一种车辆行驶工况合理性评价方法。
2、本发明通过以下技术方案得以实现。
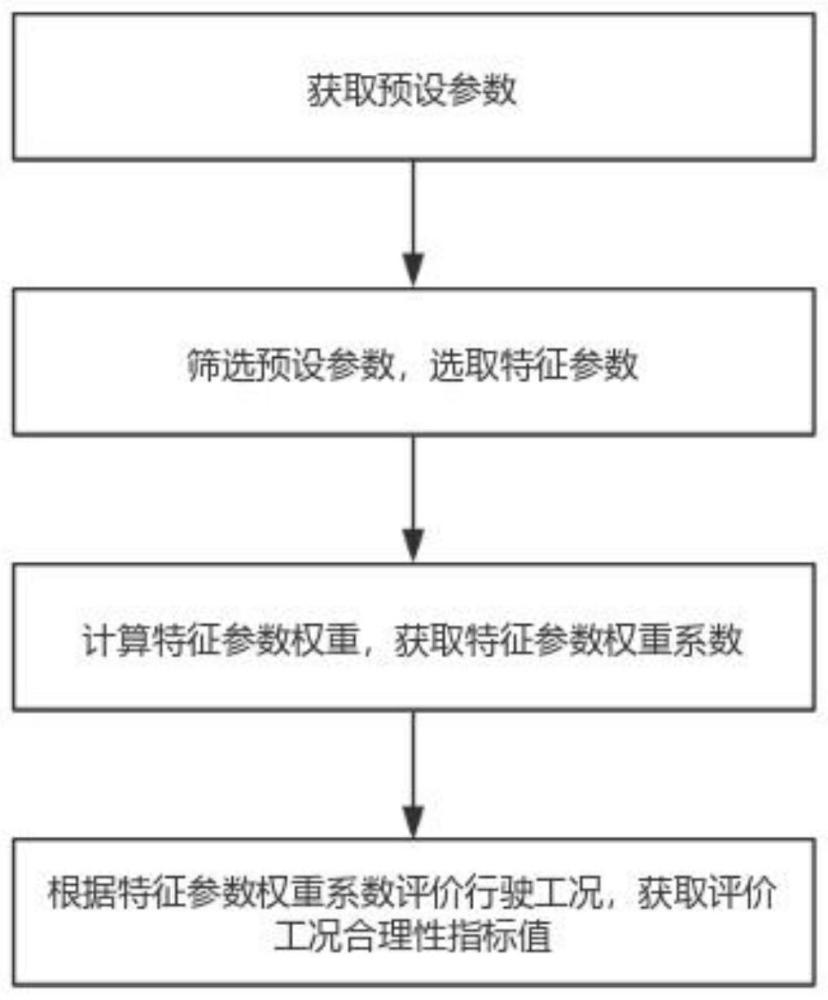
3、本发明提供的一种车辆行驶工况合理性评价方法,包括以下步骤:
4、获取预设参数;
5、筛选预设参数,选取特征参数;
6、计算特征参数的权重,获取特征参数权重系数;
7、根据特征参数权重系数评价行驶工况,获取评价工况合理性指标值。
8、优选地,所述预设参数包括速度类别、加速度类别和功率特点类别;
9、所述速度类别包括平均车速vm、平均运行车速vmr、车速标准差vsd、停车时间比例pti、不同车速段时间比例;
10、所述加速度类别包括加速时间比例pta、减速时间比例ptd、加速度标准差asd、加速段平均加速度减速段平均加速度加速段对应加速度标准差减速段对应加速度标准差平均相对加速度平均相对减速度
11、所述功率特点类别包括平均驱动功率平均制动功率
12、所述平均车速vm为行程片段总里程和总时间的比值;
13、所述平均运行车速vmr为车速值大于0.1km/h的行程片段总行驶里程和行驶时间的比值;
14、所述车速标准差vsd为大于0.1km/h的车速值标准差;
15、所述停车时间比例pti为小于0.1km/h的车速值时间占比;
16、所述不同车速段时间比例包括pt0_10、pt10_20、pt20_30、pt30_40、pt40_50、pt50_60、pt60_70、pt70_80、pt80_90、pt90_100、pt100_110、pt120+,分别为车速在(0.1,10]、(10,20]、(20,30]、(30,40]、(40,50]、(50,60]、(60,70]、(70,80]、(80,90]、(90,100]、(100,110]、(110,120]、(120,+∞]区间内的时间占比;
17、所述加速时间比例pta为加速度大于0.01m/s2的行程片段对应时间占比;
18、所述减速时间比例ptd为加速度小于-0.01m/s2的行程片段对应时间占比;
19、所述加速度标准差asd为大于0.01m/s2、小于-0.01m/s2的加速度值标准差;
20、所述加速段平均加速度为连续的加速数据段中加速度大于0.01m/s2的加速度值均值;
21、所述减速段平均加速度为连续的减速数据段中加速度小于-0.01m/s2的加速度值均值;
22、所述加速段对应加速度标准差为连续的加速数据段中加速度大于0.01m/s2的加速度标准差;
23、所述减速段对应加速度标准差为连续的减速数据段中加速度小于-0.01m/s2的加速度标准差;
24、所述平均相对加速度的计算公式为:其中为加速度,单位为m/s2、a+为所有加速度序列号集合;
25、所述平均相对减速度的计算公式为:其中表示减速度,单位为m/s2、a-表示所有减速度序列号集合;
26、所述平均驱动功率的计算公式为其中为平均驱动需求功率,单位为kw、ft_i表示i时刻车轮处驱动需求转矩,单位为nm、f+为车辆驱动转矩集合、nf+为集合中下标值数量;
27、所述平均制动功率的计算公式为其中为平均制动需求功率,单位为kw、ft_i表示i时刻车轮处驱动需求转矩,单位为nm、f-为制动转矩下标值集合、nf-为集合中下标值数量;
28、其中,所述加速度由采集的车速值计算得到,计算过程如下:
29、
30、其中,v为离散车速值、i为车速值序号、td为车速采样时间步长。
31、优选地,所述筛选初始特征参数,选取特征参数具体步骤包括:
32、根据样本数据、soc数据和油耗数据划分短行程,根据预设参数建立特征参数集;
33、计算短行程能耗;
34、基于线性回归方法验证特征参数充分性;
35、基于方差扩大因子法验证特征参数多重共线性;
36、根据短行程能耗、特征参数的充分性及多重共线性在特征参数集中剔除冗余特征参数;
37、其中,所述样本数据为反映车速和能耗的数据,对于纯电动车辆,样本数据包括同步采集的车速和实时soc数据;对于传统燃油车,样本数据包括同步采集的车速和实时油耗数据;对于混合动力车辆,样本数据包括同步采集的车速、实时soc和实时油耗数据。
38、优选地,所述根据样本数据、soc数据和油耗数据划分短行程的划分规则为:
39、如果数据采集对象车辆为纯电动汽车或传统燃油车,对一条样本数据划分短行程的操作包括:以第一个车速为0的值为短行程起点,对应时刻为t0,等待达到搜索时间标准阈值后向后搜索,当再次出现0车速值后停止搜索,该车速值为短行程终点,对应时刻为tf,以tf为时间切割点,得到短行程;对剩余样本数据重复此步骤,将样本工况数据全部划分为m个短行程,同时得到相应的soc或油耗片段;
40、如果数据采集对象车辆为混合动力车辆,对一条样本数据划分短行程的操作包括:一条样本数据从0车速值开始,对应时刻为t0,等待达到搜索时间标准阈值后向后搜索,当tf时刻出现满足车速为0且|soc(tf)-soc(t0)|<2%时,以tf为时间切割点,得到短行程;对剩余样本数据重复此步骤,将样本工况数据全部划分为m个短行程,同时得到相应的soc或油耗片段。
41、优选地,所述计算短行程能耗的计算方法包括:
42、对于传统燃油车辆,直接根据采集的油耗片段计算每个短行程百公里油耗,油耗单位为l/100km;对于纯电动车辆,根据soc片段中首末soc偏差和电池容量计算电耗,电耗单位为kwh/100km;
43、对于混合动力车辆,根据重型混合动力电动汽车能量消耗量试验方法中综合燃料消耗的计算方法计算得到短行程对应综合油耗。
44、优选地,所述基于线性回归方法验证特征参数充分性具体步骤包括计算每个短行程特征参数值、建立所有特征参数关于短行程油耗或电耗的回归模型、采用r平方检验回归模型拟合优度、采用f检验验证回归模型显著性和分析回归残差分布特点;
45、所述根据短行程能耗、特征参数的充分性及多重共线性在特征参数集中剔除冗余特征参数采用逐步回归法剔除冗余特征参数。
46、优选地,所述计算特征参数的权重,获取特征参数权重系数具体步骤包括:
47、检验特征参数集中的特征参数采用因子分析法进行分析的可行性;
48、短行程数据标准化并建立因子分析一般形式;
49、根据因子分析一般形式确定因子个数并计算因子载荷矩阵,获取公因子数;
50、根据因子载荷矩阵和公因子数计算标准化后的特征参数的权重,获取标准化后的特征参数权重系数;
51、选取得到的特征参数集定义为xs=[x1,x2,…,xs];
52、xs标准化后参数序列记为对应数据标准差为σ=[σ1,σ2,…,σs]。
53、优选地,所述检验特征参数集中的特征参数采用因子分析法进行分析的可行性具体为:设置检验标准值,使用kmo检验分析特征参数集xs中的特征参数是否适用于因子分析,如果kmo值小于检验标准值则特征参数集xs中的特征参数不适用于因子分析,各特征参数权重系数相同,否则特征参数集xs中的特征参数适用于因子分析,各特征参数权重系数不同;
54、所述数据标准化并建立因子分析一般形式具体为:将各短行程对应特征参数值和对应能耗值标准化,得到新的特征参数值矩阵和能耗值序列,建立因子分析一般形式;
55、所述特征参数值矩阵和能耗值序列表达式如下:
56、
57、
58、其中,x*中每一列数据为满足
59、所述因子分析一般形式为x*=af+ε,其中a=(aij)s×p为因子载荷矩阵、f=[f1,f1,…,fp]为公因子、ε为特殊因子;
60、所述公因子和所述特殊因子的关系为:cov(f,ε)=0,即公因子和特殊因子不相关;d(f)=ip,即各公因子不相关且方差为1;即各因子不相关。
61、优选地,所述根据因子分析一般形式确定因子个数并计算因子载荷矩阵,获取公因子数具体为:定义参数序列对应共同度设置公因子数初步数目为s,使用主成分分析法计算得到因子载荷矩阵并确定因子个数,根据因子载荷矩阵获取各因子的方差贡献值,根据方差贡献值获取方差贡献率,根据方差贡献率获取目标公因子数;
62、所述根据方差贡献率获取目标公因子数具体为:将因子根据方差贡献率从大到小排列,得到f1,f2,…,fs,共s个公因子,此时特殊因子ε为0,设置累计贡献率标准阈值,以累计贡献率标准阈值为因子筛选条件,当s个公因子中前p个公因子对应方差贡献率之和大于等于累计贡献率标准阈值时,取p为目标公因子数;
63、所述所述根据因子载荷矩阵和公因子数计算标准化后的特征参数的权重,获取标准化后的特征参数权重系数具体为:使用主因子法根据公因子数计算获取载荷矩阵as×p,使用巴特莱特法根据载荷矩阵as×p计算获取因子得分矩阵bp×s,根据得分矩阵bp×s计算获取中各特征参数权重系数;
64、所述计算获取中各特征参数权重系数表达式如下:
65、
66、其中,λ为特征参数权重系数序列,λ=[λ1,λ2,…,λs]、pc为因子贡献率序列,pc=[pc1,pc2,…,pcp]、(bp×s)t为因子得分矩阵bp×s。
67、优选地,所述根据特征参数权重系数评价行驶工况具体为:以加权均方根偏差l作为评价工况合理性指标,l越小工况代表性越好;
68、所述均方根偏差l表达式如下:
69、
70、其中,l为均方根偏差、λ1,λ2,…,λs为特征参数权重系数、为总体样本数据s个特征参数值;如果特征参数不满足因子分析,各特征参数权重系数相等,均为1/s。
71、本发明的有益效果在于:
72、1、在保证行驶工况充分反映车辆能耗特征的前提下,采用逐步回归方法剔除某些和能耗相关性较弱或者和其他参数相关性较弱的参数,有效保证了构建的工况的代表性,避免了无关参数的负面影响;
73、2、提出的基于因子分析的加权均方根综合评价指标使得工况构建过程中某些关键参数值和对应的样本数据参数值之间偏差较小,而某些不太重要的参数允许保留较大偏差,在计算资源有限的前提下,充分保障了工况代表性。
本文地址:https://www.jishuxx.com/zhuanli/20240731/190167.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表