一种兜售机器人的制作方法
- 国知局
- 2024-07-31 21:47:00
本技术涉及自动售货设备,具体提供一种兜售机器人。
背景技术:
1、随着时代的发展,现代科学技术发展迅速,网络技术的广泛应用,使人们的生产生活发生了翻天覆地的变化。各种自动化智能化的设备逐渐走入了我们身边的生活,使人们的生活更加便捷。其中售货设备在近年在越来越多的场合出现,一方面增加了新的商业销售形式,另一方面,极大地方便了人们的生活。
2、现有的自动售货机已经有多种类型了,随着技术的发展与人们的需求在不断提高,自动售货机多为固定安装在公共场所的某个位置,内部补充完商品后,用户需要走到自动售货机进行购买,自动售货机受限于位置固定导致其使用范围一定的局限性。虽然有的售货机也可以移动售货,但是其移动仅可在固定的轨道上,而能够自由移动的售货机器人虽然能够克服适用范围有限的弊端,但是存在移动的碰撞隐患。
3、相应地,本领域需要一种新的兜售机器人来解决上述问题。
技术实现思路
1、本实用新型旨在解决上述技术问题,即解决现有技术中自动售货设备移动过程中,如何降低碰撞隐患的问题。为此目的,本实用新型提供了一种兜售机器人,该兜售机器人包括:
2、机器人主体及售货单元,所述机器人主体的侧面设置有所述售货单元,所述售货单元内用于放置待售卖物品;
3、轮组单元,所述机器人主体的底部设置有所述轮组单元以使所述机器人主体移动;
4、防撞单元,所述防撞单元为设置在所述机器人主体底部的环形结构。
5、在上述具有兜售机器人的具体实施方式中,所述防撞单元套设在所述机器人主体的外壁上;或者,所述防撞单元通过连接件与所述机器人主体的外壁相连。
6、在上述具有兜售机器人的具体实施方式中,所述兜售机器人还包括控制单元与感应单元,所述感应单元设置在所述防撞单元内部,所述控制单元与所述轮组单元通讯连接,所述感应单元的信号输出端与所述控制单元的信号接收端连接。
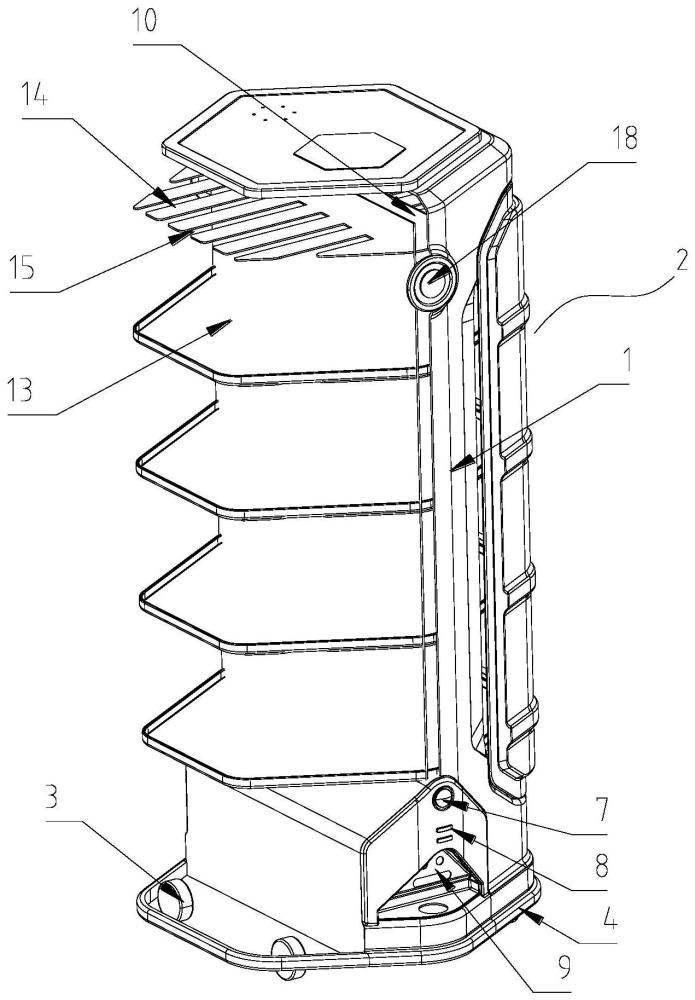
7、在上述具有兜售机器人的具体实施方式中,所述兜售机器人还包括深度相机及激光雷达,所述深度相机和所述激光雷达均与所述控制单元通讯连接,所述深度相机设置在所述机器人主体的上部,所述机器人主体上设置有充电口,所述激光雷达设置在所述充电口的侧面。
8、在上述具有兜售机器人的具体实施方式中,所述机器人主体为多棱柱型,所述机器人主体的棱柱竖向侧边为圆角结构。
9、在上述具有兜售机器人的具体实施方式中,所述售货单元至少为两个,多个所述售货单元间隔设置在所述机器人主体的四周。
10、在上述具有兜售机器人的具体实施方式中,所述机器人主体的四周间隔设置有多个安装缺口;
11、所述售货单元包括货仓内壁、货架组件及货仓门,所述货仓内壁设置在所述安装缺口内,所述货架组件为多个且间隔设置在所述货仓内壁上,所述货仓门活动设置在所述货仓内壁上。
12、在上述具有兜售机器人的具体实施方式中,所述货架组件包括承托板及挂板,所述挂板上设置有多个悬挂部,所述挂板位于所述承托板的上方。
13、在上述具有兜售机器人的具体实施方式中,所述货仓门包括仓门骨架及门板,所述仓门骨架的任意一个侧边缘与所述货仓内壁活动连接,所述仓门骨架为弯折型,所述仓门骨架的轮廓与所述机器人主体的侧壁轮廓适配,所述门板设置在所述仓门骨架上。
14、在上述具有兜售机器人的具体实施方式中,所述兜售机器人还包括呼吸灯,多个所述呼吸灯间隔设置在所述机器人主体上。
15、在上述具有兜售机器人的具体实施方式中,不同所述售货单元所在的机器人主体侧壁颜色不同。
16、在采用上述技术方案的情况下,本实用新型所提出的兜售机器人能够携带商品实现自由的移动,并通过安装在机器人主体四周的防撞单元尽可能地规避碰撞引起的安全隐患。机器人主体上安装售货单元,售货单元携带着商品,轮组单元在机器人主体的底部并带动机器人主体移动,位于机器人主体底部的环形防撞单元套设在机器人主体的外壁上,当意外发生碰撞时,能够有效减缓撞击力,从而提高自动兜售机器人的安全性。
技术特征:1.一种兜售机器人,其特征在于,所述兜售机器人包括:
2.根据权利要求1所述的兜售机器人,其特征在于,所述防撞单元(4)套设在所述机器人主体(1)的外壁上;或者,所述防撞单元(4)通过连接件与所述机器人主体(1)的外壁相连。
3.根据权利要求2所述的兜售机器人,其特征在于,所述兜售机器人还包括控制单元(5)与感应单元(6),所述感应单元(6)设置在所述防撞单元(4)内部,所述控制单元(5)与所述轮组单元(3)通讯连接,所述感应单元(6)的信号输出端与所述控制单元(5)的信号接收端连接。
4.根据权利要求3所述的兜售机器人,其特征在于,所述兜售机器人还包括深度相机(7)及激光雷达(8),所述深度相机(7)和所述激光雷达(8)均与所述控制单元(5)通讯连接,所述深度相机(7)设置在所述机器人主体(1)的上部,所述机器人主体(1)上设置有充电口(9),所述激光雷达(8)设置在所述充电口(9)的侧面。
5.根据权利要求4所述的兜售机器人,其特征在于,所述机器人主体(1)为多棱柱型,所述机器人主体(1)的棱柱竖向侧边为圆角结构。
6.根据权利要求5所述的兜售机器人,其特征在于,所述售货单元(2)至少为两个,多个所述售货单元(2)间隔设置在所述机器人主体(1)的四周。
7.根据权利要求6所述的兜售机器人,其特征在于,所述机器人主体(1)的四周间隔设置有多个安装缺口(10);
8.根据权利要求7所述的兜售机器人,其特征在于,所述货架组件包括承托板(13)及挂板(14),所述挂板(14)上设置有多个悬挂部(15),所述挂板(14)位于所述承托板(13)的上方。
9.根据权利要求7所述的兜售机器人,其特征在于,所述货仓门(12)包括仓门骨架(16)及门板(17),所述仓门骨架(16)的任意一个侧边缘与所述货仓内壁(11)活动连接,所述仓门骨架(16)为弯折型,所述仓门骨架(16)的轮廓与所述机器人主体(1)的侧壁轮廓适配,所述门板(17)设置在所述仓门骨架(16)上。
10.根据权利要求9所述的兜售机器人,其特征在于,所述兜售机器人还包括呼吸灯(18),多个所述呼吸灯(18)间隔设置在所述机器人主体(1)上。
11.根据权利要求10所述的兜售机器人,其特征在于,不同所述售货单元(2)所在的机器人主体(1)侧壁颜色不同。
技术总结本技术涉及自动售货设备技术领域,具体提供一种兜售机器人,旨在解决现有技术中自动售货设备移动过程中,如何降低碰撞隐患的问题。为此目的,本技术的兜售机器人包括机器人主体、售货单元、轮组单元及防撞单元,所述机器人主体的侧面设置有所述售货单元,所述售货单元内用于放置待售卖物品;所述机器人主体的底部设置有所述轮组单元以使所述机器人主体移动;所述防撞单元为设置在所述机器人主体底部的环形结构。通过上述方案,能够携带商品实现自由的移动,并通过安装在机器人主体四周的防撞单元尽可能的规避碰撞引起的安全隐患。技术研发人员:董全超受保护的技术使用者:芜湖云从科技有限公司技术研发日:20230921技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240731/190911.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表