基于停车场道闸的智能遥控方法及系统与流程
- 国知局
- 2024-07-31 22:05:25
本发明涉及智能道闸领域,尤其涉及基于停车场道闸的智能遥控方法及系统。
背景技术:
1、停车场道闸是一种用于控制车辆出入停车场的设备,通常由机械臂、控制系统和传感器组成,其作用是限制车辆进出,有效管理停车场的停放流量,确保安全与秩序。
2、目前,常用的停车场道闸控制方法主要包括手动操作、红外线感应和电子遥控等,手动操作需要人工控制道闸的开关,无法实现远程控制和自动化管理;电子遥控则可以通过无线电信号实现远程控制,但对于信号干扰和安全性有较高的要求,因此,对于停车场道闸的控制方法技术还需要进一步改进和创新,以提高停车场道闸的智能控制效率。
技术实现思路
1、本发明提供基于停车场道闸的智能遥控方法及系统,其主要目的在于提高停车场道闸的智能控制效率。
2、为实现上述目的,本发明提供的基于停车场道闸的智能遥控方法,包括:
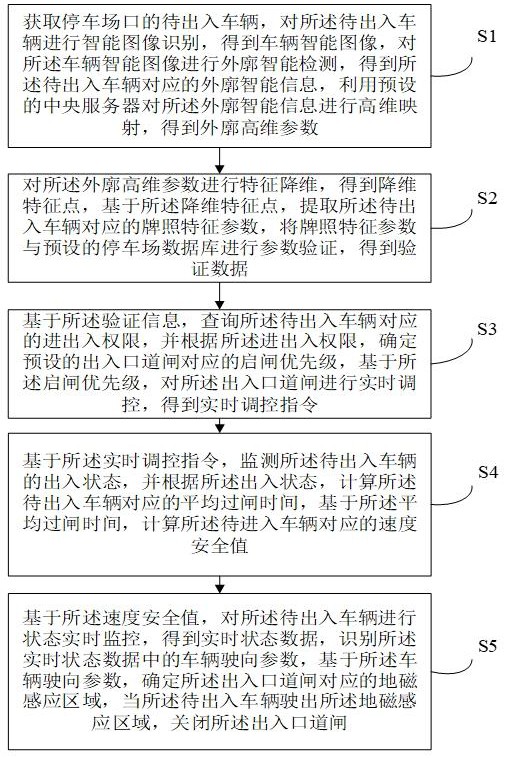
3、获取停车场口的待出入车辆,对所述待出入车辆进行智能图像识别,得到车辆智能图像,对所述车辆智能图像进行外廓智能检测,得到所述待出入车辆对应的外廓智能信息,利用预设的中央服务器对所述外廓智能信息进行高维映射,得到外廓高维参数;
4、对所述外廓高维参数进行特征降维,得到降维特征点,基于所述降维特征点,提取所述待出入车辆对应的牌照特征参数,将牌照特征参数与预设的停车场数据库进行参数验证,得到验证数据;
5、基于所述验证信息,查询所述待出入车辆对应的进出入权限,并根据所述进出入权限,确定预设的出入口道闸对应的启闸优先级,基于所述启闸优先级,对所述出入口道闸进行实时调控,得到实时调控指令;
6、基于所述实时调控指令,监测所述待出入车辆的出入状态,并根据所述出入状态,计算所述待出入车辆对应的平均过闸时间,基于所述平均过闸时间,计算所述待进入车辆对应的速度安全值;
7、基于所述速度安全值,对所述待出入车辆进行状态实时监控,得到实时状态数据,识别所述实时状态数据中的车辆驶向参数,基于所述车辆驶向参数,确定所述出入口道闸对应的地磁感应区域,当所述待出入车辆驶出所述地磁感应区域,关闭所述出入口道闸。
8、可选地,所述对所述待出入车辆进行智能图像识别,得到车辆智能图像,包括:
9、利用预设的监控设备采集所述待出入车辆的车体图像,并将所述车体图像划分为主体图像和从属图像;
10、分别识别所述主体图像和所述从属图像对应的主像素点位和从像素点位;
11、基于所述主像素点位和所述从像素点位,分别分析所述主体图像和所述从属图像对应的主图像语义信息和从图像语义信息;
12、根据所述主图像语义信息和从图像语义信息,分别提取所述主体图像和所述从属图像对应的主特征信息和从特征信息;
13、将所述主体图像、所述从属图像、所述主特征信息以及所述从特征信息进行组合,得到所述车辆智能图像。
14、可选地,所述对所述车辆智能图像进行外廓智能检测,得到所述待出入车辆对应的外廓智能信息,包括:
15、识别所述车辆智能图像对应的边缘像素,映射所述边缘像素对应的像素长度;
16、基于所述像素长度,对所述车辆智能图像进行外廓角点检测,得到外廓角点数据;
17、基于所述外廓角点数据,对所述车辆智能图像进行区域智能填充,得到外廓智能信息。
18、可选地,所述基于所述降维特征点,提取所述待出入车辆对应的牌照特征参数,包括:
19、分割所述降维特征点对应的特征字符;
20、对所述特征字符进行文本提取,得到字符文本信息;
21、识别所述字符文本信息中的牌照描述子;
22、基于所述牌照描述子,提取所述待出入车辆对应的牌照特征参数。
23、可选地,所述基于所述验证信息,查询所述待出入车辆对应的进出入权限,包括:
24、对所述验证信息进行数据解析,得到解析数据;
25、基于所述解析数据,查询预设的停车场管理数据库中的车联信息,识别所述车联信息的权限状态;
26、将所述权限状态更新至所述待出入车辆对应的权限日志;
27、基于所述权限日志,确定所述待出入车辆对应的进出入权限。
28、可选地,所述根据所述进出入权限,确定预设的出入口道闸对应的启闸优先级,包括:
29、基于所述进出入权限,建立所述待出入车辆对应的权限等级体系;
30、基于所述权限等级体系,规划所述预设的出入口道闸对应的道闸设置;
31、基于所述道闸设置,配置所述预设的出入口道闸对应的门禁系统;
32、基于所述门禁系统,确定预设的出入口道闸对应的启闸优先级。
33、可选地,所述根据所述出入状态,计算所述待出入车辆对应的平均过闸时间,包括:
34、利用下述公式计算所述待出入车辆对应的平均过闸时间:
35、;
36、其中,at表示所述待出入车辆对应的平均过闸时间,表示所述待出入车辆的数量索引,表示所述待出入车辆的总数量,表示第辆车通过道口所需的时间,表示第辆车的出入状态参数,表示状态参数对应的状态函数。
37、可选地,所述基于所述平均过闸时间,计算所述待进入车辆对应的速度安全值,包括:
38、利用下述公式计算所述待进入车辆对应的速度安全值:
39、;
40、其中,表示所述待进入车辆对应的速度安全值,j表示所述待出入车辆的车辆索引,表示第j辆车通过道口所需的时间,at表示所述待出入车辆对应的平均过闸时间,表示第j辆车的驾驶员技术评分,表示驾驶员的技术水平,表示第j辆车的载客量指标,表示第j辆车的车况指数。
41、可选地,所述基于所述速度安全值,对所述待出入车辆进行状态实时监控,得到实时状态数据,包括:
42、将所述速度安全值作为所述待出入车辆对应的速度标准;
43、基于所述速度标准,对所述待出入车辆进行速度实时检测,得到车辆实时速度;
44、对所述车辆实时速度进行状态标识,得到车辆标识状态;
45、提取所述车辆标识状态中的实时状态数据。
46、为了解决上述问题,本发明还提供基于停车场道闸的智能遥控系统,所述系统包括:
47、高维映射模块,用于获取停车场口的待出入车辆,对所述待出入车辆进行智能图像识别,得到车辆智能图像,对所述车辆智能图像进行外廓智能检测,得到所述待出入车辆对应的外廓智能信息,利用预设的中央服务器对所述外廓智能信息进行高维映射,得到外廓高维参数;
48、参数验证模块,用于对所述外廓高维参数进行特征降维,得到降维特征点,基于所述降维特征点,提取所述待出入车辆对应的牌照特征参数,将牌照特征参数与预设的停车场数据库进行参数验证,得到验证数据;
49、实时调控模块,用于基于所述验证信息,查询所述待出入车辆对应的进出入权限,并根据所述进出入权限,确定预设的出入口道闸对应的启闸优先级,基于所述启闸优先级,对所述出入口道闸进行实时调控,得到实时调控指令;
50、安全值计算模块,用于基于所述实时调控指令,监测所述待出入车辆的出入状态,并根据所述出入状态,计算所述待出入车辆对应的平均过闸时间,基于所述平均过闸时间,计算所述待进入车辆对应的速度安全值;
51、地磁感应模块,用于基于所述速度安全值,对所述待出入车辆进行状态实时监控,得到实时状态数据,识别所述实时状态数据中的车辆驶向参数,基于所述车辆驶向参数,确定所述出入口道闸对应的地磁感应区域,当所述待出入车辆驶出所述地磁感应区域,关闭所述出入口道闸。
52、本发明通过获取停车场口的待出入车辆,不仅有助于提高停车场的管理效率和安全性,同时也为数据分析和自动化控制提供了基础,促进了停车场管理水平的提升,本发明通过对所述外廓高维参数进行特征降维,得到降维特征点,可以帮助过滤掉噪声和冗余特征,保留最重要的特征,提高后续的数据质量处理效果,本发明基于所述验证信息,查询所述待出入车辆对应的进出入权限,可以有效管理停车场的车辆流量,避免出现拥堵或混乱的情况,优化停车场的运行效率,本发明基于所述实时调控指令,监测所述待出入车辆的出入状态,并根据所述出入状态,可以合理分配通行资源,减少车辆等待时间,提高道闸口的通行效率,本发明基于所述速度安全值,对所述待出入车辆进行状态实时监控,得到实时状态数据,能够保障路口安全、优化流量管理、提高停车场的运行效率,并为后续道闸决策提供数据支持。因此,本发明提出的基于停车场道闸的智能遥控方法及系统,能够提高停车场道闸的智能控制效率。
本文地址:https://www.jishuxx.com/zhuanli/20240731/191929.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表