一种车载控制器局域网总线装置及其控制方法与流程
- 国知局
- 2024-08-02 13:48:17
本发明属于电子通信,特别涉及一种以硬件隔离及软件中间人技术改造成的车载控制器局域网(can,controllerarea network)总线装置及其控制方法。
背景技术:
1、随着经济的持续发展和城市化进程的加速,汽车已经成为了中国消费者的首选出行工具。这一趋势也带动了汽车行业的飞速发展,无论是传统燃油车还是新能源电动车,都在中国市场中得到了广泛的关注和应用。
2、adas,全称为高级驾驶辅助系统,已成为当代汽车技术发展的核心。随着技术的进步,adas系统功能逐渐丰富,从最初的停车辅助、碰撞警告发展到自动驾驶,为驾驶员提供了更加安全、便捷的驾驶体验。但随之而来的是系统的复杂性急剧提升,对系统软硬件的开发和验证提出了更高的要求。
3、为应对汽车市场的快速变化和竞争压力,许多车企希望在短时间内完成新车型的开发。这导致在没有完整汽车硬件平台的情况下,车企就已经开始了新型汽车控制器的开发及验证工作。为实现这一目标,常见的做法是基于现有的旧车型平台进行一系列的改造和调试。
4、对旧车型进行改装以适配新的控制器是一个复杂且具有挑战性的工作。首先,此类改装往往会对原车的总线拓扑结构产生重大影响,进而对整车的通信和功能实现造成困难。更重要的是,这种改装会影响汽车的can总线拓扑。can总线作为汽车内部通信的关键技术,任何对其结构的更改都可能带来不可预测的后果。
5、随着技术的发展,一种高速的can技术——数据率可调控制器局域网(canfd,canwithflexible data rate)已经被更多的车型所采用。这种高速通信技术对线路信号质量的要求非常高,只有确保优质的信号传输,才能保证控制器的正常工作。然而,基于物理改造的方法很难满足这一要求,这不仅影响开发测试的效率,更严重的是,在adas测试中,如果因为信号质量问题导致控制器失效,可能对测试人员的生命安全构成威胁。
6、综上,一方面,当进行旧车型改装以适配新的控制器时,经常需要对原车的总线拓扑结构进行修改。这种修改可能会引入新的通信问题,导致原有的控制器和新的控制器之间的通信不稳定,从而增加了开发和验证的复杂性,可能会导致某些功能无法实现或性能下降,并对整车的通信和功能实现造成困难,增加故障率。另一方面,由于canfd技术对线路信号质量的要求较高,物理改造可能不足以满足这种高速通信技术的要求,而在物理改造和调试过程中,由于总线拓扑结构和信号质量的问题,可能出现系统故障或控制器失效,控制器可能无法正常工作,导致功能失效。在adas测试中,信号质量不良可能导致控制器失效,对测试人员的生命安全构成威胁。因此可能需要更多的时间和资源去调试和优化,延长开发周期,同时增加了测试过程中的风险。
技术实现思路
1、针对上述问题,本发明提供一种车载控制器局域网总线装置及其控制方法。
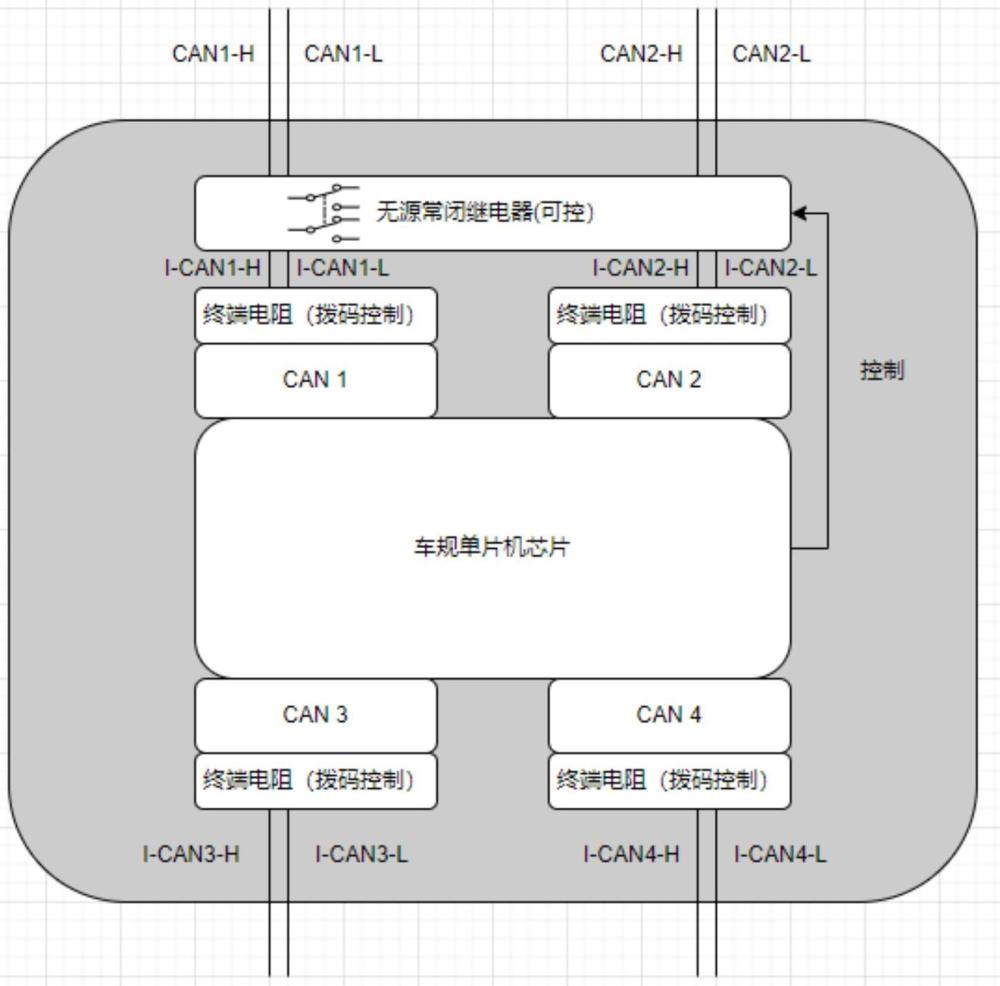
2、本发明提供的车载控制器局域网总线装置,包括:包括车规单片机芯片及其上4路can x通道:can 1、can 2、can 3和can 4,can x代表控制器局域网或数据率可调控制器局域网,
3、其中,
4、所述通道can 1、can 2上均连接有可控的无源常闭继电器。
5、进一步,
6、所述4路can x通道均包括第一路高速控制器局域网总线can-h和第二路高速控制器局域网总线can-l,即:
7、所述通道can 1包括总线can1-h和can1-l;
8、所述通道can 2包括总线can2-h和can2-l;
9、所述通道can 3包括总线can3-h和can3-l;
10、所述通道can 4包括总线can4-h和can4-l。
11、进一步,
12、所述总线can1-h和can1-l以及can2-h和can2-l上均连接有所述可控的无源常闭继电器。
13、进一步,
14、无电源的状态下所述总线can1-h和can2-h数据连通,所述总线can1-l和can2-l数据连通;
15、有电源的状态下,所述通道can 1和can 3之间数据连通,所述通道can 2和can 4之间数据连通。
16、进一步,
17、有电源的状态下,所述总线can1-h和can3-h数据连通,所述总线can1-l和can3-l数据连通,所述总线can2-h和can4-h数据连通,所述总线can2-l和can4-l数据连通。
18、进一步,
19、所述车规单片机芯片上设有总线i-can1-h和i-can1-l,i-can2-h和i-can2-l,i-can3-h和i-can3-l,i-can4-h和i-can4-l,
20、所述总线i-can1-h和i-can1-l通过所述无源常闭继电器分别对应地连接所述总线can1-h和can1-l,
21、所述总线i-can2-h和i-can2-l通过所述无源常闭继电器分别对应地连接所述总线can2-h和can2-l,
22、在所述无源常闭继电器通电的工况下,所述总线can1-h和i-can1-h连通,所述总线can1-l和i-can1-l连通,所述总线can2-h和i-can2-h连通,所述总线can2-l和i-can2-l连通,
23、在所述无源常闭继电器未通电的工况下,所述总线can1-h和i-can1-h不连通,所述总线can1-l和i-can1-l不连通,所述总线can2-h和i-can2-h不连通,所述总线can2-l和i-can2-l不连通,
24、所述车规单片机芯片上还设有总线i-can3-h和i-can3-l,i-can4-h和i-can4-l,
25、所述总线i-can3-h和i-can3-l分别对应的连接所述总线can3-h和can3-l,所述总线i-can4-h和i-can4-l分别对应的连接所述总线can4-h和can4-l。
26、进一步,
27、在所述4路can x通道中均设有一个120欧且可通过拨码控制即程序控制的终端电阻,用来适配不同的网络拓扑。
28、进一步,
29、所述通道can 1和can 2的终端电阻均设于所述车规单片机芯片和无源常闭继电器之间。
30、本发明还提供上述的车载控制器局域网总线装置的控制方法,其包括:
31、基于下面两种典型工作模式:
32、1.无源工作模式,
33、在所述无源工作模式下,不需要外部电源供电,通过拨码控制来控制车载控制器局域网总线装置中的无源常闭继电器,使得总线can1-h和can2-h之间的连接、can1-l与can2-l之间的连接均被维持,以确保原车网络的连续性;
34、2.有源转发模式,
35、在所述有源转发模式下,所述车载控制器局域网总线装置需要外部电源供电,通过拨码控制来控制所述无源常闭继电器将通道can 1和can 2与车规单片机芯片的相应接口连通,所述车规单片机芯片对从所述通道can 1和can 2接收到的数据进行读取,过滤,构造新的控制器局域网消息,发送,并转发到通道can 3和can 4,同时把从所述通道can 3和can 4接收到的数据转发至所述通道can 1和can 2。
36、进一步,包括:
37、在所述无源工作模式下,所述车规单片机芯片不工作,所有的数据流都直接通过所述通道can 1和can 2,而不经过任何处理,
38、在所述有源转发模式下,所述车规单片机芯片处于工作状态,所述车规单片机芯片动态地转发数据,根据实际需求在4路can x通道之间进行数据传输。
39、本发明提供的车载控制器局域网总线装置解决了对高速can总线进行物理改造时,出现的残桩效应问题。通过使用本发明提供的设备,可以在更改can总线的时候,避免引入过多的支线,确保每个被隔离出来的控制器保持总线拓扑结构,从而满足改装需求,同时保证通讯的稳定和信号质量。
40、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所指出的结构来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20240801/240693.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表