一种动态场景分布式定位与同步方法
- 国知局
- 2024-08-02 14:00:41
本发明涉及无线网络定位,尤其涉及一种动态场景分布式定位与同步方法。
背景技术:
1、高精度定位和时钟同步对于智能交通系统至关重要。基于卫星的定位系统是最流行的定位、导航和授时服务提供商,但在隧道、隐蔽区域和城市峡谷等复杂环境,以及自动驾驶和交通拥堵等交通安全关键场景中,难以提供厘米级定位精度、纳秒级同步精度和毫秒级响应延迟的定位和同步服务。
2、无线网络定位系统具有成本低、范围广的优点,具有实现高精度实时定位的潜力。然而,无线定位硬件设备受电压变化、环境温度、硬件老化等外部因素的影响,即使经过仔细的初始校准,不同设备的时钟时间也是异步的。在现有的无线定位方法中通常使用点对点双向测距来实现时钟同步。然而,随着网络规模的增长,测量更新频率急剧降低,定位成本急剧增大。另一方面,设备的移动使得精度对测量更新速率非常敏感。在高速移动的场景下,测距误差的显著累积将会给高精度实时定位系统带来巨大的挑战。因此,亟需一种适用于动态场景的高精度实时定位方法。
技术实现思路
1、本发明提供一种动态场景分布式定位与同步方法,用以解决现有定位系统难以进行高精度实时定位的问题。
2、本发明提供一种动态场景分布式定位与同步方法,包括:
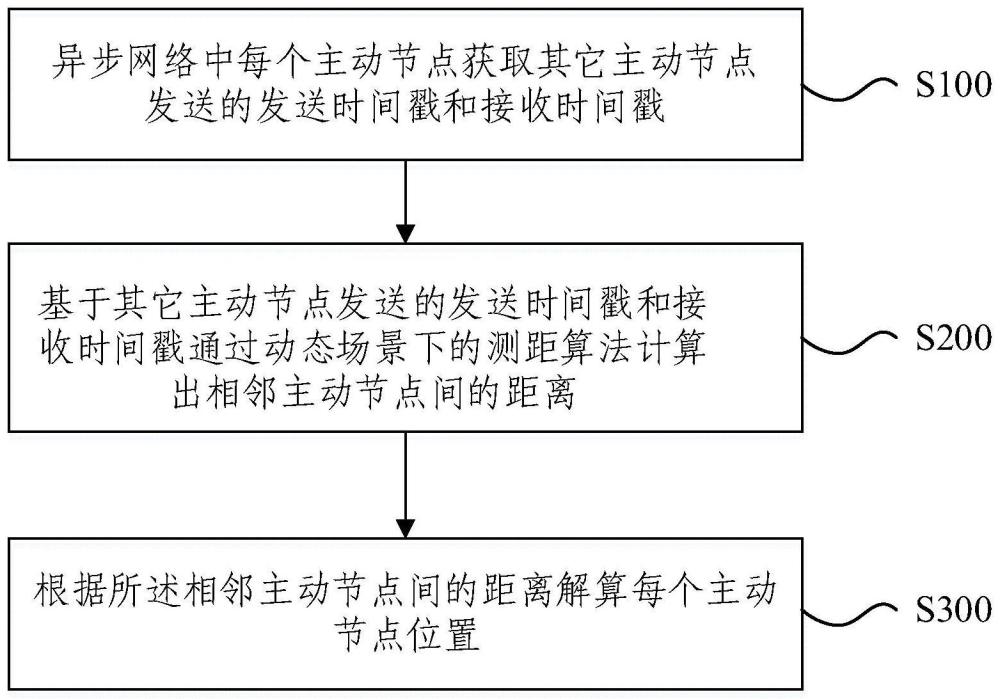
3、异步网络中每个主动节点获取其它主动节点发送的发送时间戳和接收时间戳;
4、基于其它主动节点发送的发送时间戳和接收时间戳通过动态场景下的测距算法计算出相邻主动节点间的距离;
5、根据所述相邻主动节点间的距离解算每个主动节点位置;
6、其中,所述发送时间戳是主动节点按照设定广播发送顺序广播发送测距信号时的发送时间,所述接收时间戳是其它主动节点接收到测距信号的时间。
7、根据本发明提供的一种动态场景分布式定位与同步方法,还包括:
8、异步网络中的每个静默节点根据主动节点发送的发送时间戳和接收时间戳估算每个静默节点与任意两个主动节点间的测量距离差;
9、根据所述测量距离差和主动节点位置,解算静默节点位置。
10、根据本发明提供的一种动态场景分布式定位与同步方法,所述
11、异步网络中每个主动节点获取其它主动节点发送的发送时间戳和接收时间戳,具体包括:
12、经过间隔设定时间段,异步网络中的主动节点依次按照设定广播发送顺序广播发送测距信号,并记录发送时间戳;
13、其余主动节点接收所述测距信号并记录接收时间戳;
14、直至遍历所有主动节点,完成测距信号的发送,记录所有的发送时间戳和接收时间戳。
15、根据本发明提供的一种动态场景分布式定位与同步方法,所述
16、直至遍历所有主动节点,完成测距信号的发送,记录所有的发送时间戳和接收时间戳,具体包括:
17、所述主动节点按照设定广播发送顺序广播发送本次测距信号时,同步将上一周期内记录的所有时间戳和接收时间戳以测距信号的形式广播发送;
18、其余节点同步接收所有的发送时间戳和接收时间戳。
19、根据本发明提供的一种动态场景分布式定位与同步方法,所述
20、静默节点接收所有主动节点发送的测距信号,静默节点自身不发送测距信号;
21、所述静默节点记录接收到的测距信号中主动节点所包含的发送时间戳和接收时间戳。
22、根据本发明提供的一种动态场景分布式定位与同步方法,所述基于其他主动节点发送的发送时间戳和接收时间戳通过动态场景下的测距算法计算出相邻主动节点间的距离,具体包括:
23、依照两个主动节点之间通信的四条测量信号时间戳,计算同步参照时间;
24、根据所述同步参照时间计算主动节点之间的时钟漂移系数之比;
25、根据所述时钟漂移系数之比计算上述同步参照时间的最大似然估计;
26、基于所述同步参照时间的最大似然估计,通过设定推导的计算公式消除节点移动造成的影响,得到主动节点间的到达时间估计;
27、将主动节点间的到达时间估计乘以信号传播速度进而得到主动节点间的距离。
28、本发明还提供一种动态场景分布式定位与同步系统,所述系统包括:
29、信息获取模块,用于异步网络中每个主动节点获取其它主动节点发送的发送时间戳和接收时间戳;
30、测量模块,用于基于其它主动节点发送的发送时间戳和接收时间戳通过动态场景下的测距算法计算出相邻主动节点间的距离;
31、位置解算模块,用于根据所述相邻主动节点间的距离解算每个主动节点位置;
32、其中,所述发送时间戳是主动节点按照设定广播发送顺序广播发送测距信号时的发送时间,所述接收时间戳是其它主动节点接收到测距信号的时间。
33、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述动态场景分布式定位与同步方法。
34、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述动态场景分布式定位与同步方法。
35、本发明提供的一种动态场景分布式定位与同步方法,通过改进传统的点对点测距方法,提出一种新型的分布式轮循组网测距协议,降低时间成本和资源消耗。另一方面,网络测距方法从各个节点的广播测量模块获取测距信号的发送/接收时间戳信息,提出了一种动态场景下基于最大似然的信号达到时间估计算法,有效消除时钟偏差和节点移动导致的测距误差,实现高精度网络测距与定位。
技术特征:1.一种动态场景分布式定位与同步方法,其特征在于,包括:
2.根据权利要求1所述的动态场景分布式定位与同步方法,其特征在于,还包括:
3.根据权利要求1所述的动态场景分布式定位与同步方法,其特征在于,所述异步网络中每个主动节点获取其它主动节点发送的发送时间戳和接收时间戳,具体包括:
4.根据权利要求3所述的动态场景分布式定位与同步方法,其特征在于,所述直至遍历所有主动节点,完成测距信号的发送,记录所有的发送时间戳和接收时间戳,具体包括:
5.根据权利要求2所述的动态场景分布式定位与同步方法,其特征在于,所述静默节点接收所有主动节点发送的测距信号,静默节点自身不发送测距信号;
6.根据权利要求1所述的动态场景分布式定位与同步方法,其特征在于,所述基于其他主动节点发送的发送时间戳和接收时间戳通过动态场景下的测距算法计算出相邻主动节点间的距离,具体包括:
7.一种动态场景分布式定位与同步系统,其特征在于,所述系统包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6任一项所述动态场景分布式定位与同步方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述动态场景分布式定位与同步方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述动态场景分布式定位与同步方法。
技术总结本发明提供一种动态场景分布式定位与同步方法,包括:异步网络中每个主动节点获取其它主动节点发送的发送时间戳和接收时间戳;基于其它主动节点发送的发送时间戳和接收时间戳通过动态场景下的测距算法计算出相邻主动节点间的距离;根据所述相邻主动节点间的距离解算每个主动节点位置;其中,所述发送时间戳是主动节点按照设定广播发送顺序广播发送测距信号时的发送时间,所述接收时间戳是其它主动节点接收到测距信号的时间。本发明解决了现有定位系统难以进行高精度实时定位的问题。技术研发人员:沈渊,赵涵颖,高浩然,张子健受保护的技术使用者:清华大学技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240801/241344.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种室内摄像头的制作方法
下一篇
返回列表