一种基于激光雷达的通讯方法及系统与流程
- 国知局
- 2024-08-02 14:31:59
本发明属于数据传输,尤其涉及一种基于激光雷达的通讯方法及系统。
背景技术:
1、现如今,v2x技术利用电磁波作为通讯基础,实现车对车、车对道路、道路对车等多方位道路参与者的相互通讯,由于功率限制,v2x技术通信距离一般处于400米到800米,并且存在20ms的网络延迟,同时,v2x技术需要在车辆前方和后方布置发射接收天线,以及单独的控制器,成本较高。
2、作为智能驾驶传感器,越来越多的智能驾驶车辆搭载激光雷达传感器,激光雷达使用激光作为主动探测源,向车辆周围发射激光点云,以探测周围道路及参与者的距离、速度等信息。当前,搭载v2x天线的车辆较少,目前只有百度等厂家无人车搭载了v2x相关天线及控制器,且未大批量生产。v2x系统包含前向天线、后向天线、天线馈线以及v2x控制器,零部件成本较高,无法普及。同时,由于激光雷达传感器具有高精度、高准确性、探测距离远等特点,越来越多的车辆会首先考虑搭载激光雷达作为智能驾驶主传感器,这就使整车智能驾驶传感器套件成本较高,本着该省则省的原则,如果系统不是必须v2x技术,车厂几乎不会选择搭载v2x系统。
3、但是对于尚未搭载v2x系统的车辆,其基本无法实现快速的数据传输过程,无法适应自动化发展的大趋势。
技术实现思路
1、本发明的目的在于提供一种基于激光雷达的通讯方法,旨在解决尚未搭载v2x系统的车辆,其基本无法实现快速的数据传输过程,无法适应自动化发展的大趋势的问题。
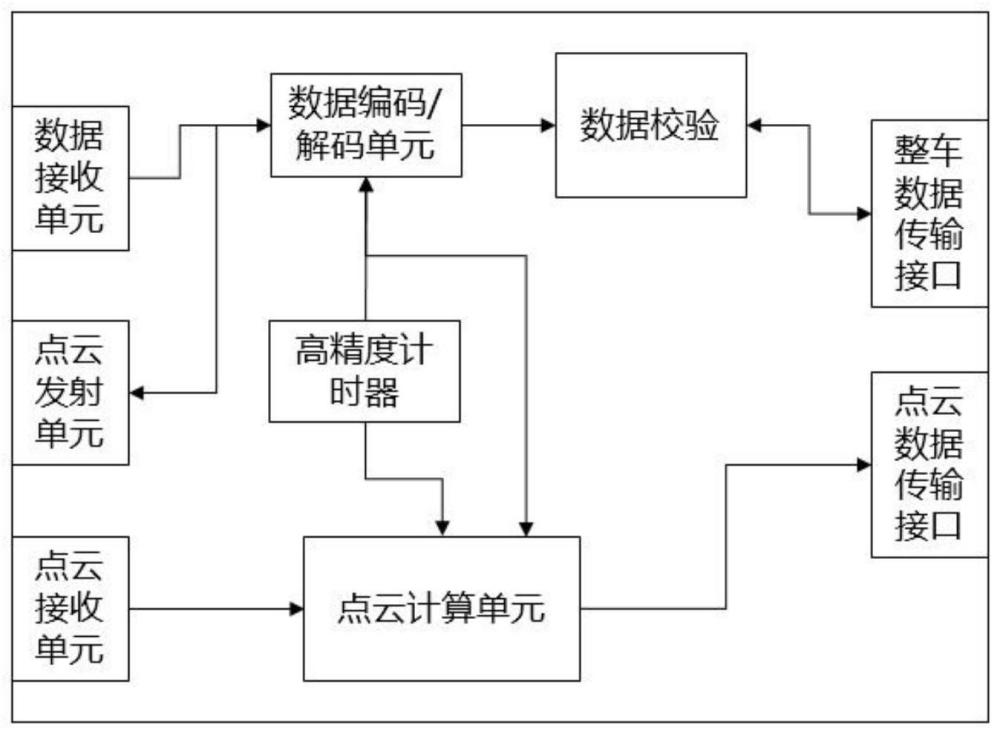
2、本发明是这样实现的,一种基于激光雷达的通讯系统,所述系统包括:点云发射单元、点云接收单元、数据接收单元、数据编码/解码单元、数据校验单元、高精度计时器、点云计算单元和传输接口,所述点云发射单元与点云计算单元连接,所述点云计算单元用于对接收到的数据进行整合和编码,数据接收单元与数据编码/解码单元连接,数据编码/解码单元用于对数据接收单元接收的通讯数据进行解码或者编码,数据校验单元与数据编码/解码单元和传输接口连接,数据校验单元用于验证数据真实性,点云发射单元与数据编码/解码单元连接。
3、优选的,所述传输接口至少包括点云数据传输接口和整车数据传输接口,其中点云数据传输接口与点云计算单元连接,整车数据传输接口与数据校验单元连接。
4、优选的,所述高精度计时器与数据编码/解码单元和点云计算单元连接,高精度计时器用于向数据编码/解码单元和点云计算单元提供时间信息。
5、本发明的另一目的在于提供一种基于激光雷达的通讯方法,应用于如上所述的基于激光雷达的通讯系统,所述方法包括:
6、构建点云数据格式,所述点云数据格式至少包括点云发射周期、点云发射间隔、短周期编码、长周期编码以及校验编码;
7、获取待发送数据,基于点云数据格式对待发送数据进行处理,生成点云控制数据;
8、激光雷达基于点云控制数据向目标车辆发射激光;
9、目标车辆接收点云数据,对点云数据进行解码,获取待发送数据。
10、优选的,短周期编码和长周期编码均具有固定的点云发射间隔,且长周期编码的点云发射间隔大于短周期编码的点云发射间隔。
11、优选的,短周期编码、长周期编码以及校验编码各自对应的点云发射间隔均不相同。
12、优选的,目标车辆接收点云数据,对点云数据进行解码,获取待发送数据的步骤中,将长周期编码记录为第一二进制字符,将短周期编码记录为第二二进制字符,将点云数据转化为二进制数据。
13、优选的,在每一个点云发射周期发送的总数据量相同。
14、优选的,第一二进制字符为二进制字符1,第二二进制字符为二进制字符0,在单个点云发射周期内发送的数据中,至少包括一个八位二进制数据。
15、优选的,目标车辆接收点云数据,对点云数据进行解码,获取待发送数据的步骤中,目标车辆基于预设的数据查询表格确定点云数据中包含的数据内容。
16、本发明提供的一种基于激光雷达的通讯系统,通过搭载激光雷达,将整车部分信息共享给其他道路参与者,满足了智能驾驶车辆需要同时搭载激光雷达和v2x通讯设备的需求,降低整车零部件硬件成本,同时更好的方便整车零部件的布置,由于采用激光进行通讯,激光雷达具有很高的响应要求,通讯的网络延迟控制在1ms左右,相比v2x设备的网络延迟,具有更高的时效性。
技术特征:1.一种基于激光雷达的通讯系统,其特征在于,所述系统包括:点云发射单元、点云接收单元、数据接收单元、数据编码/解码单元、数据校验单元、高精度计时器、点云计算单元和传输接口,所述点云发射单元与点云计算单元连接,所述点云计算单元用于对接收到的数据进行整合和编码,数据接收单元与数据编码/解码单元连接,数据编码/解码单元用于对数据接收单元接收的通讯数据进行解码或者编码,数据校验单元与数据编码/解码单元和传输接口连接,数据校验单元用于验证数据真实性,点云发射单元与数据编码/解码单元连接。
2.根据权利要求1所述的基于激光雷达的通讯系统,其特征在于,所述传输接口至少包括点云数据传输接口和整车数据传输接口,其中点云数据传输接口与点云计算单元连接,整车数据传输接口与数据校验单元连接。
3.根据权利要求1所述的基于激光雷达的通讯系统,其特征在于,所述高精度计时器与数据编码/解码单元和点云计算单元连接,高精度计时器用于向数据编码/解码单元和点云计算单元提供时间信息。
4.一种基于激光雷达的通讯方法,其特征在于,应用于如权利要求1-3任一所述的基于激光雷达的通讯系统,所述方法包括:
5.根据权利要求4所述的基于激光雷达的通讯方法,其特征在于,短周期编码和长周期编码均具有固定的点云发射间隔,且长周期编码的点云发射间隔大于短周期编码的点云发射间隔。
6.根据权利要求4所述的基于激光雷达的通讯方法,其特征在于,短周期编码、长周期编码以及校验编码各自对应的点云发射间隔均不相同。
7.根据权利要求4所述的基于激光雷达的通讯方法,其特征在于,目标车辆接收点云数据,对点云数据进行解码,获取待发送数据的步骤中,将长周期编码记录为第一二进制字符,将短周期编码记录为第二二进制字符,将点云数据转化为二进制数据。
8.根据权利要求7所述的基于激光雷达的通讯方法,其特征在于,在每一个点云发射周期发送的总数据量相同。
9.根据权利要求7所述的基于激光雷达的通讯方法,其特征在于,第一二进制字符为二进制字符1,第二二进制字符为二进制字符0,在单个点云发射周期内发送的数据中,至少包括一个八位二进制数据。
10.根据权利要求7所述的基于激光雷达的通讯方法,其特征在于,目标车辆接收点云数据,对点云数据进行解码,获取待发送数据的步骤中,目标车辆基于预设的数据查询表格确定点云数据中包含的数据内容。
技术总结本发明适用于数据传输技术领域,尤其涉及一种基于激光雷达的通讯方法及系统,所述系统包括:点云发射单元、点云接收单元、数据接收单元、数据编码/解码单元、数据校验单元、高精度计时器、点云计算单元和传输接口,所述点云发射单元与点云计算单元连接,数据接收单元与数据编码/解码单元连接,数据校验单元用于验证数据真实性,点云发射单元与数据编码/解码单元连接。本发明满足了智能驾驶车辆需要同时搭载激光雷达和V2X通讯设备的需求,降低整车零部件硬件成本,同时更好的方便整车零部件的布置,由于采用激光进行通讯,激光雷达具有很高的响应要求,通讯的网络延迟控制在1ms左右,相比V2X设备的网络延迟,具有更高的时效性。技术研发人员:李建伟,王溪,王宇,宗雯露,贺赵阳,刘德宇受保护的技术使用者:阿尔特汽车技术股份有限公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240801/243052.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表