基于风险与信任评估的车辆位置隐私风险感知方法及系统
- 国知局
- 2024-08-02 14:34:14
本发明属于车联网,具体涉及一种基于风险与信任评估的车辆位置隐私风险感知方法及系统。
背景技术:
1、随着5g和6g通信技术的应用与发展,城市各种通信单元和智能网络的普及运用,汽车的智能网联已成为智慧城市发展研究的重点,车联网(iov)应运而生。作为智能交通的前沿技术,城市iov服务的目标清晰且涵盖了多个方面:提高交通效率、减少交通事故和拥堵风险、了解周边环境、通过车辆与基础设施之间的高效互联以提高城市交通系统的便捷性和安全性,更好地感知城市交通信息来支持更智能的城市交通系统。
2、作为技术发展的双刃剑,车联网的快速发展同样带来了诸多威胁,车联网安全系统的风险感知变得至关重要。近年来,基于位置服务(lbs)与群体感知在智慧城市的车联网系统中发挥着重要作用,iov范式中的lbs技术涉及到大量的位置数据,群体感知的出现也给位置隐私的保护带来了新的挑战。并且,在当今的大数据时代,越来越多的人开始关注保护个人隐私。如果车辆的位置信息没有得到很好的保护,可能会危及车辆用户的隐私,泄露诸如家庭地址、工作地点和政治倾向等敏感信息,从而导致严重后果。
3、在保护车辆位置的隐私方面,目前的研究普遍采用独立方案来解决某一特定iov场景问题,在面对复杂多变的城市环境时,很难找到一种保护方案来确保广泛的车辆位置隐私安全。风险感知作为一种预防性安全策略,具有降低计算成本、可配合多种位置隐私保护机制(lppm)来增强隐私保护效果等优点,非常适用于错综复杂的城市环境。因此,与其使用单一的位置隐私保护策略,不如使其与风险感知方法相结合,通过提供准确的风险指标来协助iov系统多方决策,确保iov系统的安全性。然而,目前还没有一种自适应城市风险感知方法可以参与到车辆位置隐私保护的安全工作中。因此,设计一种自适应、高可靠的城市位置隐私风险感知方法及系统是必不可少的。
技术实现思路
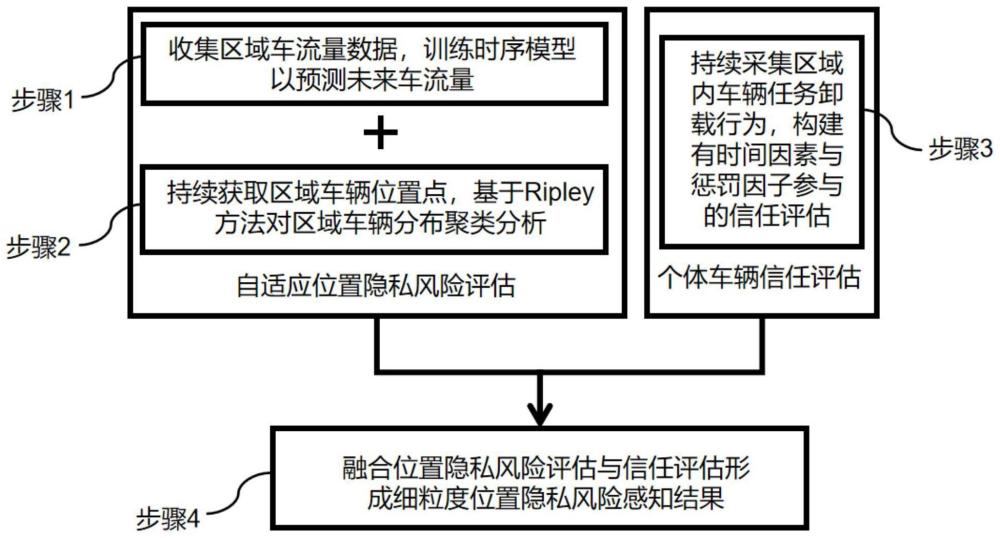
1、为了克服现有技术的不足,本发明提供了一种基于风险与信任评估的车辆位置隐私风险感知方法及系统,包括收集区域车流量数据,训练时序模型以预测未来车流量;持续获取区域车辆位置点,基于ripley方法对车辆分布聚类分析;结合未来车流量与聚类分布结果构建自适应位置隐私风险评估;持续采集区域车辆任务卸载行为,构建有时间因素与惩罚因子参与的车辆信任评估;融合位置隐私风险评估与信任评估形成细粒度位置隐私风险感知结果。本发明通过融合位置隐私风险评估与车辆信任评估,增强了位置隐私风险感知的自适应性与可靠性,解决了传统位置隐私风险感知方法对复杂多变环境适应性差、对未来威胁敏感度低的问题。
2、本发明解决其技术问题所采用的技术方案如下:
3、步骤1:初始化时间实例k=0与合法任务交互强度θ,重置评估刷新间隔δt,获取目标区域基于lstm的时序预测序列模型给出的车流量预测序列p;
4、步骤2:根据车流量预测序列匹配目标时间实例pk与pk+1,获得短时序评估间隔内平均车流量e(p);计算未来不同时间实例中的放缩车流量时序特征与其所占权重
5、步骤3:根据ripley方法计算目标区域内不同间距范围内的车辆位置分布聚类情况k(d),对不同聚类情况k(d)进行归一化并找到最优聚类特征值lopt;计算目标区域当前时间实例上车辆位置分布特征量ck与其所占权重
6、步骤4:对目标区域内的每个车辆vi∈v根据其自身任务卸载行为计算交互强度ψi,并更新每位车辆用户的最新信任值根据风险分布对每个车辆用户的最新信任值进行归类;
7、步骤5:根据目标区域内每个车辆用户的最新信任值分类结果,采用自变异权重计算目标区域当前时间实例上的位置隐私风险评估结果rk;根据位置隐私风险评估结果和目标区域内每位车辆用户的最新信任值建立位置隐私风险感知结果集合计算细粒度车联网风险感知特征值
8、进一步地,所述车联网包括车辆用户、路边单元rsu/基站bs、iov安全管理中心、云中心数据库和信任机构ta;每个车辆用户都能在不同rsue∈ε={e1,e2,...,ei}管理的服务区域通过无线连接获得风险感知服务;该服务会持续评估车辆vi在当前时间实例k下的位置隐私风险rk和该车辆的信任值评估结果集合用于车辆联网系统的记录与管理;每个rsu/bs都能够共享数据,实现城市区域信息全覆盖;rsu/bs使用当前环境信息和经过训练的未来车流量预测模型来评估车辆在该区域当前时间下的位置隐私风险;位置隐私风险评估结果rk为1的区域,将暂时停止车辆服务,并反馈给iov安全管理中心;rsu/bs将采集车辆的驾驶行为ψi,评估车辆的信任值,异常车辆将被反馈至云中心数据库进行记录;信任机构ta通过管理云中心数据库获取并记录每辆车的信任值和r/t值。
9、进一步第,所述步骤2中,路边单元根据lstm模型训练出来的车流量预测序列对目标区域的当前与下一段时间实例进行匹配,计算位置隐私风险评估中关于车流量预测的必要特征量,其具体骤如下:
10、步骤2-1:目标区域的路边单元根据车流量预测序列p匹配当前时间实例下的车流量大小pk;
11、步骤2-2:目标区域的路边单元根据车流量预测序列p匹配下一时间实例下的车流量大小pk+1;
12、步骤2-3:目标区域的路边单元根据车流量预测序列p计算在评估刷新间隔δt内平均车流量e(p);
13、步骤2-4:目标区域的路边单元计算当前时间实例下车流量特征权重计算公式如下:
14、
15、设定目标区域的位置隐私风险感知在时间实例k∈{1,2,...,k,...k}上持续评估,e(p)表示车流量预测序列p在评估刷新间隔δt计算短时序评估间隔内平均车流量,根据预测评估刷新间隔δt大小进行更新;
16、步骤2-5:目标区域的路边单元放缩当前时间实例下车流量时序特征量其表达式如下所示:
17、
18、进一步地,所述步骤3中,路边单元根据ripley方法计算目标区域内不同间距范围的车辆位置分布聚类情况,对不同聚类情况进行准确分析,并对该特征进行归一化及权重计算处理,其具体步骤如下:
19、步骤3-1:路边单元根据ripley’s k函数计算目标区域内车辆位置分布的聚类特征k(d);
20、假设在目标区域每个车辆用户都能通过无线连接获得风险感知服务;用ripley’s k函数计算目标区域内车辆位置分布的聚类特征k(d),表达为:
21、
22、其中,n为评价区域内车辆总数,γ为评价区域的强度,表示为:
23、
24、其中,s为风险感知目标区域的评估面积;
25、ripley’s k函数中的i(dij)是判断两辆车之间的距离是否在指定评估范围内的函数,表示为:
26、
27、用l={l1,l2,...,ιn}表示一个目标评估区域内每辆车的物理位置,其中lv=(xv,yv),
28、步骤3-2:目标区域的路边单元根据修正函数对聚类特征k(d)进行边缘校正;表示为:
29、
30、其中,dix和diy分别便是从车辆vi到评估区域边界的水平或垂直边的欧几里德距离。
31、步骤3-3:目标区域的路边单元对不同聚类情况k(d)进行归一化处理得到l(d),表示为:
32、
33、归一化处理完成后,目标区域的路边边单元根据l(d)集合找到目标区域的最优聚类特征值lopt,具体的表示为:
34、lopt=max{l(0),l(1),...l(d-1),l(d)}。
35、步骤3-4:目标区域的路边单元根据l(d)集合找到目标区域的最优聚类特征值lopt;
36、步骤3-5:目标区域的路边单元通过放缩k(d)得到当前时间实例下车辆位置分布特征量ck,表示为:
37、
38、步骤3-6:目标区域的路边单元计算得到当前时间实例下车辆位置分布特征权重表示为:
39、
40、进一步地,所述步骤4中,对目标区域内的每个车辆根据其自身任务卸载行为更新每位车辆用户的信任值;根据风险分布对每个车辆用户的最新信任值进行归类,其具体步骤如下:
41、步骤4-1:目标区域的路边单元对每个车辆vi∈v根据其自身任务卸载行为计算交互强度ψi,表示为:
42、
43、其中,m(i)是在预测评估刷新间隔δt内用户车辆vi与目标区域内的路边单元交互的消息量;
44、设定目标区域内的路边单元获取每个车辆vi∈v的历史非法行为次数m,目标区域的安全辅助因子λ以及目标区域的合法交互强度阈值θ,在步骤4-5与步骤4-6中,对目标区域内每位车辆用户vi的信任值按照积极与消极态进行更新,表示为:
45、
46、其中,当ψi<θ时,更新为积极态当ψi≥θ时,更新为消极态为防止误判或用户的失误操作,在系统能力允许的范围内,定义ρ为系统容忍度值约束,m<ρ,m,ρ∈{x|x∈z&x≥0}。
47、步骤4-2:目标区域的路边单元获取每个车辆vi∈v的历史非法行为次数m;
48、步骤4-3:目标区域的路边单元获取目标区域的安全辅助因子λ;
49、步骤4-4:目标区域的路边单元获取目标区域的合法交互强度阈值θ;
50、步骤4-5:目标区域的路边单元对每个车辆vi∈v的当前时间实例的信任值以积极态进行更新得到
51、步骤4-6:若目标区域内有恶意用户vj出现与路边单元进行高强度交互的恶意任务卸载行为,则以消极态对其当前时间实例的信任值进行更新并持续观察与记录;
52、步骤4-7:目标区域的路边单元对每个车辆vi∈v根据其最新信任值进行归类,为下一次信任值的迭代做准备。
53、进一步地,所述步骤5中,根据目标区域内每个车辆用户的最新信任值分类结果计算目标区域当前时间实例上的位置隐私风险评估结果;根据位置隐私风险评估结果和目标区域内每位车辆用户的最新信任值建立位置隐私风险感知结果集合并计算细粒度车联网风险感知特征值,其具体步骤如下:
54、步骤5-1:目标区域的路边单元根据步骤3和步骤4的结果计算当前时间实例下目标区域的位置隐私风险评估结果rk,表示为:
55、
56、其中,绝对权重可以根据服务环境的安全级别来主观指定。
57、步骤5-2:若目标区域内存在高强度交互行为的恶意用户,利用绝对权重将位置隐私风险评估结果rk赋值为1;
58、步骤5-3:目标区域的路边单元根据位置隐私风险评估结果rk和目标区域内每位车辆用户的最新信任值计算细粒度车联网风险感知特征值表示为:
59、
60、步骤5-4:目标区域的路边单元根据位置隐私风险评估结果rk和目标区域内每位车辆用户的最新信任值建立位置隐私风险感知结果集合
61、一种基于风险与信任评估的车辆位置隐私风险感知方法及系统,包括数据获取模块、未来车流量预测模块、风险与信任评估模块和位置隐私风险感知模块:
62、所示数据获取模块,用于获取目标区域内包括车辆用户信息、车辆用户任务卸载行为、区域安全参数和车流量数据;将目标区域的路边单元收集到的历史各时间戳对应的车流量信息进行清洗、填充缺失值,各个车流量信息通过小波变换进行归一化,确保数据格式适合后续训练模型的输入;将目标区域的路边单元对区域内的车辆用户的任务卸载行为进行采集,通过关注车辆用户与计算设备之间的任务卸载交互,全面了解用户在任务卸载的背景下的能力和意图,从而对他们的声誉进行评估;
63、所述未来车流量预测模块,用于根据获取到的目标区域历史车流量消息对该区域未来车流量预测模型进行训练;将获取到的目标区域各时间戳的归一化车流量信息形成时间序列作为本地路边单元基于lstm的车流量预测模型的训练集,训练获取目标区域基于lstm的时序预测序列模型的目标区域未来车流量预测序列;
64、所述风险与信任评估模块,用于评估目标区域位置隐私风险与区域内每位车辆用户的任务卸载行为信任值,利用自变异权重使位置隐私风险评估具有自适应性,以时间迭代的方式更新每位车辆用户的信任值;利用基于ripley’s k方法的空间点分析,判断区域空间密度和它是否具有空间聚类特征,在指定的距离范围内总结空间相关性,使用修正函数对处于边界的车辆位置点进行边界校正;每位车辆用户的信任评估都以时间迭代的方式进行更新,使每次新的评估结果都与历史的信任评估结果密切相关,目标区域的路边单元基于信任评估中的惩罚因子对恶意用户给予惩罚,降低该恶意用户的信任值;除此以外,每位车辆用户的信任值都会反馈给目标区域并间接影响位置隐私风险评估结果;
65、位置隐私风险感知模块,用于将位置隐私风险评估与车辆用户信任值结合,输出细粒度车联网风险感知特征值与位置隐私风险感知结果集合,分别服务于车联网管理系统与车辆用户;采用自变异权重计算目标区域当前时间实例上的位置隐私风险评估结果;根据位置隐私风险评估结果和目标区域内每位车辆用户的最新信任值建立位置隐私风险感知结果集合,计算细粒度车联网风险感知特征值。
66、本发明的有益效果如下:
67、本发明提供了一种基于风险与信任评估的车辆位置隐私风险感知方法及系统,通过结合区域位置隐私风险评估与车辆信任评估,增强了位置隐私风险评估的自适应性与可靠性,解决了位置隐私风险评估在复杂多变城市环境中适应性差以及对未来位置隐私威胁敏感度低的问题。本发明首先在建立风险评估过程中,通过分析车辆空间分布和未来交通量的大小,可靠地评估位置隐私暴露风险,并利用自变异权重保证了风险评估的适应性。其次,为了解决检测恶意用户并给予其持续关注这一问题,本发明在以时间迭代方式更新的信任评估方案中添加了惩罚因子。本发明相较于传统的位置隐私风险评估方案,在对非法任务卸载的恶意用户检测上拥有更快的速度;在对未来位置隐私威胁事件的感知上具有更早、更敏感度的感知能力,位置隐私风险感知性能优越。
本文地址:https://www.jishuxx.com/zhuanli/20240801/243205.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表